CIP-2021 : B25J 9/00 : Manipuladores de control programado.
CIP-2021 › B › B25 › B25J › B25J 9/00[m] › Manipuladores de control programado.
Notas[t] desde B21 hasta B32: CONFORMACION
B25J 9/02 · caracterizado por el movimiento de los brazos, p. ej. del tipo coordenadas cartesianas (B25J 9/06 tiene prioridad).
B25J 9/04 · · por rotación de un brazo al menos, excluyendo el movimiento de la mano, p. ej. del tipo coordenadas cilíndricas o coordenadas polares.
B25J 9/06 · caracterizados por brazos de articulaciones múltiples.
B25J 9/08 · caracterizado por elementos de construcción modulares.
B25J 9/10 · caracterizado por los medios para regular la posición de los elementos del manipulador.
B25J 9/12 · · eléctricos.
B25J 9/14 · · fluidos.
B25J 9/16 · Controles por programa (control total de una fábrica, es decir, control centralizado de varias máquinas, G05B 19/418).
B25J 9/18 · · eléctricos.
B25J 9/20 · · fluidos.
B25J 9/22 · · Sistemas de registro o sistemas de reproducción (en general G05B 19/42).
CIP2021: Invenciones publicadas en esta sección.
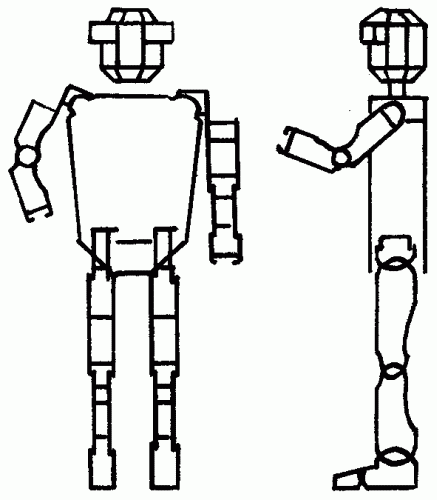
ROBOT ANDROIDE MULTIFUNCION.
(16/11/2001). Ver ilustración. Solicitante/s: HERNANDEZ SANMARTIN,VICENTE RAFAEL. Inventor/es: HERNANDEZ SANMARTIN,VICENTE RAFAEL.
Robot androide multifunción. Robot androide, bípedo, con visión estereoscópica, reconocimiento de ordenes habladas, aprensores (manos) intercambiables, multifunción. Su construcción es metalices, provista de dos brazos, dos piernas tronco y cabeza, articulaciones con 56 ejes de movimiento, tanto oscilatorio como giratorio, manos de 2, 3 ó 5 dedos. Ejes accionados con motores paso a paso. Capaz de andar (avanzar o retroceder) con sus dos piernas, movimiento en tronco y brazos. Poseyendo un microprocesador central incorporado y varios microprocesadores satélite. Puede ser dirigido a través de un PC, o bien por medio de órdenes habladas.
(01/06/1999). Solicitante/s: KSL KEILMANN SONDERMASCHINENBAU GMBH. Inventor/es: KEILMANN, ROBERT HORST.
EN UN DISPOSITIVO DE COSIDO CON UN SISTEMA DE AGUJA Y CON UN SISTEMA DE AGARRE ACTUANDO CONJUNTAMENTE CON EL, QUE ES AJUSTABLE DE FORMA COMPLETA RELATIVA CON RESPECTO A LA BONDAD DEL COSIDO EN LA DIRECCION AL MENOS DE DOS EJES ESPACIALES, EL SISTEMA DE AGUJA ESTA DISPUESTO CON ACCIONAMIENTO DE AGUJA EN UN PRIMER SOPORTE Y ES POSICIONABLE EN EL ESPACIO POR MEDIO DE UN PRIMER EQUIPO DE POSICIONAMIENTO. EL SISTEMA DE AGARRE CON EL ACCIONAMIENTO DE AGARRE ESTA DISPUESTO EN UN SEGUNDO SOPORTE Y ES POSICIONABLE POR MEDIO DE UN SEGUNDO EQUIPO DE POSICIONAMIENTO DE MANERA ESPACIAL. UN PRIMER EQUIPO DE CONTROL ELECTRONICO SINCRONIZA EL ACCIONAMIENTO DE LA AGUJA Y EL ACCIONAMIENTO DE AGARRE, Y UN SEGUNDO DISPOSITIVO DE CONTROL ELECTRONICO SINCRONIZA LOS DISPOSITIVOS DE POSICIONAMIENTO DE TAL MODO, QUE EL SISTEMA DE AGUJA Y EL SISTEMA DE AGARRE DURANTE EL PROCESO DE COSIDO MANTIENEN UNA REFERENCIA ESPACIAL PREVIAMENTE DADA DE FORMA RELATIVA UNO CON RESPECTO A OTRO.
MANIPULADOR DE VARIOS EJES.
(01/08/1996). Solicitante/s: KUKA ROBOTER GMBH. Inventor/es: ZIMMER, ERNST.
LA INVENCION SE REFIERE A UN MANIPULADOR DE VARIOS EJES, CON UN BASTIDOR Y UN PLATO HORIZONTAL ACCIONADO Y DISPUESTO SOBRE EL MISMO EN TORNO A UN EJE BASICO GIRATORIO . EL BASTIDOR PRESENTA UNA COLUMNA DE APOYO CENTRAL, CONCEBIDA COMO APOYO DEL PAR Y DEL RODAMIENTO DEL PLATO HORIZONTAL . EL ACCIONAMIENTO PARA EL PLATO HORIZONTAL SE HA DISPUESTO ESENCIALMENTE A LA ALTURA O ENCIMA DE LA PLACA BASE DEL PLATO HORIZONTAL , EN EL QUE EL MOTOR ESTA SITUADO SOBRE EL PLATO HORIZONTAL , Y LA PARTE DEL ACCIONAMIENTO DE LA TRANSMISION , ESTA DISPUESTA A LA ALTURA O ENCIMA DE LA PLACA BASE DEL PLATO HORIZONTAL . CON ESTA ESTRUCTURA, LAS PARTES DEL ACCIONAMIENTO PARA EL PLATO HORIZONTAL SON MAS ACCESIBLES PARA FINES DE MONTAJE Y DE MANTENIMIENTO, POR LO QUE SE OBTIENE TAMBIEN PARA EL RODAMIENTO UN ANCHO DE APOYO RELATIVAMENTE REDUCIDO Y CON ELLO UN AHORRO DE ESPACIO.
MANIPULADOR PENSADO PARA SU FUNCIONAMIENTO CON UN ROBOT INDUSTRIAL.
(01/06/1996) LA INVENCION SE REFIERE A UN MANIPULADOR PARA POSICIONAR PIEZAS CON RESPECTO A UN ROBOT INDUSTRIAL POR MEDIO DEL CUAL LAS PIEZAS UNA DESPUES DE LA OTRA SON PROCESADAS. EL MANIPULADOR COMPRENDE AL MENOS DOS SOPORTES DE FIJACION CADA UNO DE LOS CUALES TIENE MIEMBROS DE FIJACION PARA SUJETAR LA PIEZA RESPECTIVA, UNA SUJECION PARA LOS SOPORTES DE FIJACION, SUSPENDIDA DE FORMA MOVIL PARA MOVER UNO DE DICHOS SOPORTES DE FIJACION DESDE UNA POSICION DE CARGA, EN LA CUAL EL INTERCAMBIO DE UNA PIEZA MANTENIDA EN DICHOS MIEMBROS DE FIJACION PUEDE TENER LUGAR, HASTA UNA POSICION DE TRABAJO DENTRO DEL RANGO DE FUNCIONAMIENTO DEL ROBOT, MIENTRAS QUE SIMULTANEAMENTE…
ROBOT ARTICULADO CON DOS ANTEBRAZOS.
(16/06/1995). Solicitante/s: COMAU S.P.A.. Inventor/es: ZONA, MAURO, BETTINARDI, MARCO.
UN ROBOT ARTICULADO TIENE UN BRAZO Y DOS ANTEBRAZOS , LOS CUALES ESTAN ARTICULADOS AL BRAZO ALREDEDOR DEL MISMO EJE Y CONTROLADOS POR MEDIOS DE CONDUCCION INDEPENDIENTES.
APARATO Y PROCESO PARA REMACHAR MEJORADO.
(16/04/1995). Solicitante/s: AEROFLEX TECHNOLOGIES, INC. Inventor/es: BONOMI, CRISTIANO, BONOMI, GIOVANNI BATTISTA, GIACOMINI, LUIGI, ARESA, CARMINE, FRIGO, VALERIO.
APARATO Y PROCESO MEJORADO PARA MONTAR POSTES DE COMPONENTES POR MEDIO DE REMACHES O CIERRES SIMILKARES EN EL QUE CENTROS DE MAQUINARIA ROBOTICA CONTROLADOS POR COMPUTADOR PRESENTAN HERRAMIENTA SELECCIONADA EN POSICION ESPACIAL PREDETERMINADA EN LADOS OPUESTOS DE LOS COMPONENTES QUE SON MANTENIDOS ESTACIONARIOS EN UN APARATO. LOS ROBOTS PREPARAN LOS AGUJEROS DE REMAJCES EN LUGARES SELECCIONADOS MULTIPLES, SEGUIDO POR REPOSAR LAS HERRAMIENTAS CONTROLADAS ROBOTICAMENTE EN CADALUGAR DE AGUJERO PARA LA INSTALACION DE LOS CIERRES. LA PREPARACION DEL AGUJERO COMPLETAMENTE Y LOS EFECTOS EXTERNOS NUEVOS DE INSTALACION DE LOS CIERRES. LA PREPARACION DEL AGUJERO COMPLETAMENTE Y LOS EFECTOS EXTREMOS NUEVOS DE INSTALACION DE CIERRES MANTIENEN UN BALANCE SIMETRICO DE FUERZAS EN LOS COMPONENTES EN UNA FORMA DE EVITAR TENSIONES Y DEFORMACIONES DE LOS COMPONENTES, A TENIENDO APARATO Y MONTAJE FINAL.
ROBOT EN PARTICULAR DE LAVADO.
(16/04/1995). Solicitante/s: ETUDES TECHNIQUES-FRANCHE COMTE-ALSACE ETFA SARL. Inventor/es: BAILLS, JEAN-MICHEL.
ROBOT PARA EL TRATAMIENTO DE PIEZAS Y EN PARTICULAR PARA SU LAVADO, QUE COMPRENDE UNA TORRECILLA CIRCULAR ARRASTRADA EN ROTACION, MONTADA POR ENCIMA DEL RECINTO O SIMILAR RECIBIENDO LAS PIEZAS A TRATAR; UN ARBOL POSICIONADO VERTICALMENTE SOBRE DICHA TORRECILLA CIRCULAR, QUE CONSTA DE UN MOVIMIENTO DE TRASLACION VERTICAL ALTERNATIVO Y UN CARRO QUE SOPORTA DICHO ARBOL Y QUE PUEDE DESPLAZARSE SOBRE UNA VIA DE GUIA PREVISTA DIAMETRALMENTE SOBRE DICHA TORRECILLA CIRCULAR, CARACTERIZADO EN QUE DICHO ARBOL ESTA HUECO Y LA ALIMENTACION DE LIQUIDO DE LAVADO SE EFECTUA A TRAVES ESTE ARBOL, LA CABEZA MONTADA EN UNO DE SUS EXTREMOS ESTA DOTADA DE MEDIOS DE TRATAMIENTO DE DICHAS PIEZAS, SIENDO ESTOS MEDIOS POR EJEMPLO UNA O VARIAS BOQUILLAS DE PULVERIZACION EVENTUALMENTE ORIENTABLES.
INSTALACION ESTAMPADORA DE RANURAS.
(01/12/1994). Solicitante/s: MASCHINENFABRIK MULLER-WEINGARTEN AG. Inventor/es: HARSCH, ERICH, FROSCH, ROLF.
SE PROPONE UNA INSTALACION ESTAMPADORA DE RANURAS QUE SIRVE PARA EL TRATAMIENTO DE CHAPAS DE ROTOR Y ESTATOR CON SUBSGUIENTES ESTACIONES DE TRATAMIENTO. PARA PODER EJECUTAR TRATAMIENTOS LO MAS FLEXIBLES POSIBLE EN LAS DISTINTAS ESTACIONES DE TRATAMIENTO, LA INSTALACION ESTA EQUIPADA CON DOS BRAZOS-PINZA , DISPUESTOS EN UN EJE GIRATORIO COMUN , QUE PUEDEN LLEVAR A CABO SUS MOVIMIENTOS CON INDEPENDENCIA UNO DEL OTRO. PARA ESO, LOS BRAZOS-PINZA EJECUTAN SUS MOVIMIENTOS LONGITUDINALES Y OSCILATORIOS POR CONTROL NUMERICO.
ROBOT INDUSTRIAL DE EJES MULTIPLES.
(16/04/1994) SE PRESENTA UN ROBOR INDUSTRIAL DE EJES MULTIPLES QUE CONSISTE EN UNA ESTRUCTURA DE BANCADA , UNA PALANCA OSCILANTE QUE PUEDE GIRAR Y OSCILAR, UNA PLUMA SALIENTE OSCILANTE Y UNA MANO DE ROBOT DE MIEMBROS MULTIPLES QUE PUEDE GIRAR Y OSCILAR Y CUYOS MIEMBROS ESTAN GUIADOS POR MOTORES DISPUESTOS EN LA PLUMA SALIENTE . LA PLUMA SALIENTE ESTA MONTADA EN UN LADO DE LA PALANCA OSCILANTE CON BRAZO CON AL MENOS DOS MOTORES QUE SE ENCUENTRAN DISPUESTOS EN LOS LADOS DE LA PLUMA SALIENTE EN LA DIRECCION DE EJES OSCILANTES . EN LA EJECUCION CON UN TERCER MOTOR, LOS MOTORES ESTAN DISPUESTOS CON SUS EJES EN UN TRIANGULO DE LADOS CORTOS QUE SON LA BASE DE LOS COJINETES DE LA PLUMA SALIENTE . ALTERNATIVAMENTE, LOS MOTORES SE ENCUENTRAN DISPUESTOS CON SU LADO DE GUIA ENFRENTADOS A LA MANO DEL…
(16/01/1994). Solicitante/s: DE HAAN MECHATRONICS B.V. Inventor/es: ROSENTHAL, DOV.
ELEMENTOS DE COLOCACION INCLUYE AL MENOS DOS ELEMENTOS ALARGABLES AXIALMENTE GIRATORIAMENTE MONTADO A UN SOPORTE Y AL MENOS EN PARTE GIRATORIAMENTE MONTADO AL ELEMENTO A SER POSICIONADO. TAL ELEMENTO ALARGABLE DEBE SER COLOCADO EN UN PLANO PARA DAR UNA COLOCACION XY, O EN DIFERENTES PLANOS, EN EL QUE EL ULTIMO CASO HAY PREFERIBLEMENTE UNA BASE CON UN PRIMERELEMENTO GIRATORIAMENTE MONTADO AL PRIMER ELEMENTO SOBRE UN PIVOTE EJE (EN 187) PERPENDICULAR AL EJE PIVOTE DEL PRIMER ELEMENTO, Y MEDIOS ALARGABLES AXIALMENTE SOBRE LA BASE PARA MOVER EL PRIMER Y SEGUNDO ELEMENTO EN AL MENOS DOS DIRECCIONES PERPENDICULARES MUTUALMENTE. LOS ELEMENTOS ALARGABLES MUTUALMENTE SON PREFERIBLEMENTE ACTIVABLE ELECTRICAMENTE POR TENER UN CILINDRO CON FILETEADO DE TORNILLO INTERNA, Y UN PISTON CON FILETEADO DE TORNILLO EXTERNA, Y UN MOTOR ELECTRICO PARA GIRAR UNA DE ESAS PARTES PARA VARIAR LA LONGITUD DE LOS ELEMENTOS.
MAQUINA Y PROCEDIMIENTO DE MECANIZADO Y/O DE ACABADO DE PIEZAS MECANICAS MOLDEADAS O MECANIZADAS.
(16/11/1993). Solicitante/s: BULA & FILS S.A. Inventor/es: BULA, BERNARD.
LA MAQUINA CONSTA DE UN RECINTO CON DOS SERIES DE UNIDADES DE ACABADO Y (14',15'16') Y DOS ROBOTS MANIPULADORES Y (12'). DOS DISPOSITIVOS DE CARGA Y (9') PERMITEN LA COLOCACION MANUAL O AUTOMATICA DE LAS PIEZAS A TRATAR Y SU MANIPULACION POR LOS ROBOTS. ESTOS ULTIMOS SON DE TIPO PENDULAR Y ESTAN FIJADOS A UNA VIGA TRANSVERSAL.
SISTEMA PARA REALIZAR OPERACIONES SOBRE OBJETOS DE GRANDES DIMENSIONES ESPECIALMENTE PARA PINTAR UNA AERONAVE.
(01/04/1993). Solicitante/s: AEROSPATIALE SOCIETE NATIONALE INDUSTRIELLE, SOCIETE ANONYME DITE:. Inventor/es: JONCA, HENRI VALENTIN JEAN RESIDENCE DES FONTAINES, SARRAMEA, CLAUDE.
EL PRESENTE INVENTO ES UN SISTEMA PARA REALIZAR UNAS OPERACIONES SOBRE OBJETOS DE GRANDES DIMENSIONES, ESPECIALMENTE PARA PINTAR AERONAVES. SEGUN EL INVENTO, LOS MEDIOS DE CONTROL DEL SISTEMA SIRVEN, PREVIAMENTE A LA EJECUCION DE UN TRABAJO PREDETERMINADO PARA: - CONTROLAR EL DESPLAZAMIENTO DE UNOS PRIMEROS Y SEGUNDOS MEDIOS MOVILES, MEDIANTE UNOS MEDIOS MOTORES HACIA UNA POSICION DE CONSIGNA; - RECIBIR INFORMACIONES DE UNOS MEDIOS DE DETECCION MONTADOS EN LOS PRIMEROS Y SEGUNDOS MEDIOS MOVILES, PARA MEDIR LA SEPARACION ENTRE LA POSICION REAL DE DICHOS MEDIOS MOVILES Y DICHA POSICION DE CONSIGNA; - TROTAR DICHAS INFORMACIONES Y CONTROLAR, EN FUNCION DE ESTAS, EL DESPLAZAMIENTO DEL O DE LOS BRAZOS ARTICULADOS PARA LLEVAR EL ORGANO DE TRABAJO A UNA POSICION DE REFERENCIA. EL INVENTO SE APLICA ESPECIALMENTE PARA PINTAR AVIONES "GRUESO PORTADORES".
DISPOSITIVO DE TOMA DE BOTELLAS Y DE SOPORTE PARA UN SISTEMA DE LECTURA PARA EL CENTRAJE DE BOTELLAS, EN MAQUINAS ETIQUETADORAS.
(16/06/1992). Ver ilustración. Solicitante/s: ALFA CONSTRUZIONI MECCANICHE S.P.A. Inventor/es: ORLANDI, IRENEO.
DISPOSITIVO DE TOMA DE BOTELLAS Y DE SOPORTE PARA UN SISTEMA DE LECTURA PARA EL CENTRAJE DE BOTELLAS, EN MAQUINAS ETIQUETADOTAS. LA INVENCION SE ENCUADRA EN EL CAMPO DE LAS MAQUINAS ETIQUETADORAS DE BOTELLAS. CONCRETAMENTE SE REFIERE A UN DISPOSITIVO QUE EFECTUA LA TOMA DE BOTELLAS , EN ESPECIAL DE BOTELLAS DE POR EL TAPON Y COMPRENDE TAMBIEN MEDIOS DE LECTURA DE REFERENCIAS DE VARIOS TIPOS SITUADAS EN LAS BOTELLAS PARA ASI PODER ORIENTAR LAS MISMAS ANTES DE SU ETIQUETADO. LOS MEDIOS DE LECTURA DE LAS BOTELLAS Y LOS SOPORTES DE LOS MEDIOS PARA LA LECTURA DE LAS REFERENCIAS POSEEN UN FUNCIONAMIENTO DE TIPO NEUMATICO Y SUS MOVIMIENTOS VERTICALES, A LO LARGO DEL EJE CENTRAL DE UNA UNICA CABEZA FIJA EN LA QUE VAN ALOJADOS, ESTAN REGULADOS MEDIANTE UNA LEVA.
PROCEDIMIENTO PARA EL REVESTIMIENTO DE PIEZAS DE TRABAJO.
(16/05/1992). Solicitante/s: DURR GMBH. Inventor/es: HANDKE, HEINZ, ROTHENBURGER, HERMANN.
EN EL REVESTIMIENTO EN SERIE DE PIEZAS DE TRABAJO, COMO POR EJEMPLO CARROCERIAS DE AUTOMOVILES, CON UN ROBOT DE LACADO DE MANDO PROGRAMADO HASTA AHORA HA SIDO IMPOSIBLE TERMINAR DE PINTAR UNA PIEZA YA COMENZADA, SI POR LA RAZON QUE FUERA, SE DEBE INTERRUMPIR EL TRABAJO. SEGUN EL INVENTO, SE CALCULAN LAS POSICIONES RELATIVAS EN EL MOMENTO DE LA INTERRUPCION Y SIGUIENDO EL TRAYECTO DE MOVIMIENTO, VUELVE EL ROBOT EXACTAMENTE AL PUNTO EN DONDE SE DIO LA INTERRUPCION, REACTIVANDOSE EL PROGRAMA DE TRABAJO.
UN APARATO DE MANEJO MECANICO O DE SUJECION DE HERRAMIENTA.
(01/12/1989) UN APARATO DE MANEJO MECANICO O DE SUJECION DE HERRAMIENTA CON UN BRAZO MONTADO SOBRE UNA BASE (RS1, RS2, PS1, PS2, PS3, PS4), DISPUESTO DE TAL MODO QUE PORTE UNOS MEDIOS DE MANEJO O DE SUJECION DE HERRAMIENTA, MOVILES EN LA DIRECCION LONGITUDINAL DEL BRAZO, Y EN EL QUE DICHO BRAZO COMPRENDE AL MENOS DOS SECCIONES DE PERFIL (1A, 1B, 1C-1'C), QUE ESTAN DISPUESTAS DE MODO DESPLAZABLE MUTUAMENTE EN YUXTAPOSICION, Y QUE TIENEN UNAS PESTAÑAS DE GUIA DESLIZANTE ACOPLADAS MUTUAMENTE , PORTANDO UNA DE LAS SECCIONES DE PERFIL (1C-1'C) LOS MEDIOS CITADOS Y EN EL QUE EL DESPLAZAMIENTO MUTUO DE LAS SECCIONES DE PERFIL SE CONSIGUE CON LA AYUDA DE UNOS MEDIOS DE ACCIONAMIENTO CON AL MENOS UNA CINTA CERRADA O LAZO DE TRANSMISION QUE SE EXTIENDE EN TORNO AL MENOS DE UNA RUEDA DE GUIA O MOTRIZ EN UNA PRIMERA SECCION DE PERFIL (1A O 1B) Y ESTA UNIDA AL MENOS…
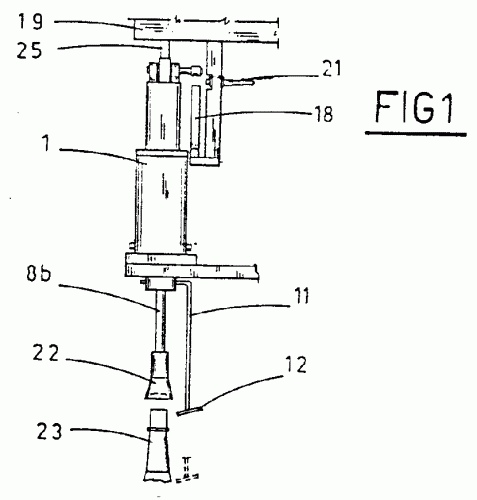
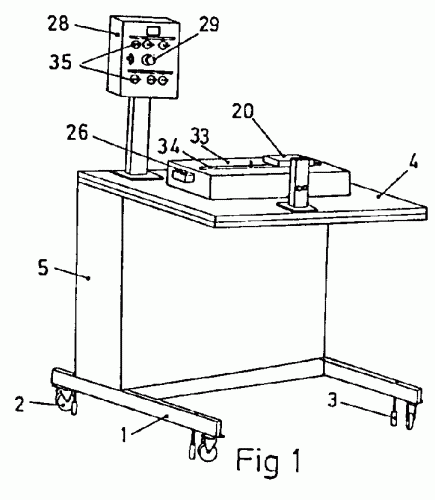
MAQUINA PARA EL FLAMEADO DE LAPICES LABIALES.
(16/01/1988). Ver ilustración. Solicitante/s: PRUNEDA CARIDAD, JACINTO.
LA PRESENTE INVENCION CONSISTE EN UNA MAQUINA PARA EL FLAMEADO DE LAPICES LABIALES, MAQUINA QUE INCORPORA UNA BANCADA CON UNA MESA EN VOLADIZO EN DONDE VA DISPUESTO UN CONJUNTO DE MECANISMOS PROTEGIDOS POR UNA CARCASA CON UNA ABERTURA PARA EL INSERTADO DE UN LAPIZ LABIAL QUE POR LA ACCION DE DICHOS MECANISMOS ES TRANSPORTADO, DE MANERA QUE EN UNA PRIMERA FASE SE ESTABLECE LA SALIDA DE LA BARRA DE LABIOS, EN UNA FASE O FASES INTERMEDIAS SE ESTABLECE SU FLAMEADO, PASANDO DICHA BARRA POR DELANTE DE UNOS QUEMADORES EN UN MOVIMIENTO CONJUNTO DE DESPLAZAMIENTO Y GIRO, PARA FINALMENTE REMETERSE DICHA BARRA EN SU CARTUCHO ALOJADOR.
PERFECCIONAMIENTOS EN MAQUINAS ROTATORIAS DE VIDEO PARA CENTRAR ORIENTAR Y TRASLADAR ARTICULOS.
(16/07/1980) Perfeccionamientos en máquinas rotatorias de video para centrar, orientar y trasladar artículos del tipo destinada a instalarse en un sistema de funcionamiento y control electrónico con ordenador provisto de una sección de memoria y que funciona para transportar artículos desde una sección de carga hasta una sección de descarga fuera de la máquina, caracterizados porque se dota a cada máquina de un soporte o transportador de artículos dispuestos en una sección de carga; una estructura de sustentación de la máquina destinada a situarse entre dichas secciones; un primer posicionador de eje X-Y que comprende un primer carro de eje X montado sobre la estructura para…
DISPOSITIVO PARA LA PROGRAMACION DE UN APARATO DE MANIOBRAS.
(16/05/1980) 1. Dispositivo para la programación de un aparato de maniobras, que puede ser movido por varios ejes por medio de una empuñadura que está guiada a mano, y mediante unos emisores de valores de medición que hacen que las componentes de fuerza, realizadas por la guía de la empuñadura, sean transformadas en señales eléctricas que determinan un programa que ha de ser memorizado y que controla los motores de accionamiento del aparato de maniobras, caracterizado porque la empuñadura tiene una parte central, que rígidamente se encuentra unida con una articulación del aparato de maniobras, y un manguito que rodea la parte central,…
APARATO PARA EL MANEJO MECANICO CON MANDO AUTOMATICO POR PROGRAMAS VARIABLES.
(01/02/1976). Solicitante/s: KELLER & KNAPPICH AUGSBURG ZWEIGNIEDERLASSUNG DER.
Resumen no disponible.
{kind=link}
{kind=link}
{kind=link}