CIP-2021 : E02F 9/20 : Mandos; Dispositivos de control (transmisión en general F16H;
control en general G05; mandos para motores eléctricos múltiples H02K, H02P).
CIP-2021 › E › E02 › E02F › E02F 9/00 › E02F 9/20[1] › Mandos; Dispositivos de control (transmisión en general F16H; control en general G05; mandos para motores eléctricos múltiples H02K, H02P).
Notas[t] desde E01 hasta E06: EDIFICIOS
E CONSTRUCCIONES FIJAS.
E02 HIDRAULICA; CIMENTACIONES; MOVIMIENTO DE TIERRAS.
E02F DRAGADO; MOVIMIENTO DE TIERRAS (extracción de turba E21C 49/00).
E02F 9/00 Elementos constitutivos de las dragas o de los ingenios para el movimiento de tierras, no limitados a una de las categorías cubiertas por los grupos E02F 3/00 - E02F 7/00 (dispositivos de colocación o de recogida de cables eléctricos de arrastre B66C).
E02F 9/20 · Mandos; Dispositivos de control (transmisión en general F16H; control en general G05; mandos para motores eléctricos múltiples H02K, H02P).
CIP2021: Invenciones publicadas en esta sección.
Dispositivo de control remoto para grúa, máquina de construcción y/o camión industrial, y sistema que comprende este dispositivo de control remoto y una grúa, una máquina de construcción y/o un camión industrial.
(13/05/2020) Dispositivo de control remoto para una grúa, una máquina de construcción o un camión industrial, con un terminal móvil en forma de tableta que comprende una pantalla con función de pantalla táctil y tiene al menos un medio de entrada para introducir comandos de control en forma de un medio de visualización de pantalla táctil así como un dispositivo de transmisión de señales para transmitir los comandos de control introducidos a un dispositivo de control de la grúa, de la máquina de construcción o del camión industrial, caracterizado por que el terminal móvil está configurado para
- recibir datos de imagen de una cámara y/o datos digitales de un modelo de información de construcción (BIM),
- con ayuda de los datos de imagen recibidos de la cámara y/o…
Sistema y procedimiento de control del portador y retroexcavadora.
(15/01/2020) Una máquina a motor que comprende:
un portador que comprende un bastidor de soporte , un compartimento del operador y un controlador de la palanca de mando dispuestos en el compartimento del operador y configurados para generar señales de movimiento en respuesta al movimiento del operador del controlador de la palanca de mando;
un accesorio acoplado de manera desmontable a la máquina a motor;
una unidad de control del portador dispuesta en el portador y configurada para recibir las señales de movimiento del controlador de la palanca de mando;
una unidad de control del accesorio dispuesta en el accesorio y configurada para controlar el movimiento del accesorio;
una red que acopla la unidad de control del portador a la unidad de control del accesorio y configurada para llevar las instrucciones…
(15/01/2020) Vehículo que incluye un motor , pudiendo ser acoplado el motor, de modo accionable de manera selectiva a los medios motrices de acoplamiento al terreno , incluyendo el vehículo un acelerador de pie para controlar selectivamente el suministro de potencia desde el motor, un acelerador manual para controlar selectivamente el suministro de potencia del motor y un asiento del operario que se puede mover entre una posición orientada hacia adelante y una posición orientada hacia atrás, caracterizado por que:
el vehículo incluye un modo de excavación, en el que:
el asiento del operario está orientado hacia atrás, el motor está desacoplado de los medios motrices de acoplamiento al terreno y el control del motor pasará, de manera predeterminada, al acelerador manual, en el que mover el asiento…
Máquina de trabajo autopropulsada así como procedimiento para frenar una máquina de trabajo de este tipo.
(06/11/2019) Máquina de trabajo autopropulsada, en particular vehículo oruga tal como una niveladora, con un accionamiento eléctrico que comprende al menos un motor eléctrico , un generador que puede accionarse por un motor de combustión para el abastecimiento del accionamiento eléctrico con energía eléctrica, al menos un módulo auxiliar conectado con el motor de combustión en forma de una bomba hidráulica, que no es necesaria para el funcionamiento de traslación y durante la traslación transporta sin presión en circulación o está pivotada a la cantidad de transporte cero, así como un dispositivo de frenado para frenar la máquina de trabajo, proporcionando dicho dispositivo de frenado un frenado generador mediante el accionamiento eléctrico y comprendiendo un dispositivo de realimentación para la realimentación de potencia eléctrica de frenado…
Un panel de control y receptáculo para un equipo de movimiento de tierra.
(23/10/2019) Un panel de control (C) y un receptáculo (R) adaptado para su uso en equipos de movimiento de tierra, en el que el panel de control (C)
- está adaptado para encajar en el receptáculo (R),
- está adaptado para controlar el equipo de movimiento de tierra y para permitir la presentación visual de información relacionada con el funcionamiento del equipo, y
- comprende una fuente de alimentación y medios de comunicación para datos, en los que, cuando el panel de control (C) está instalado en el receptáculo (R) en dicho equipo de movimiento de tierra, la potencia de funcionamiento para el panel de control se suministra por medios inalámbricos, mientras que las señales de datos se intercambian entre el panel de control y el receptáculo mediante una comunicación sin contacto,
caracterizado porque
- el receptáculo (R) comprende…
(07/08/2019) Una máquina motorizada que tiene un motor de combustión que puede controlar por separado unos elementos tractores laterales izquierdo y derecho (108L, 108R) para modificar el desplazamiento de la máquina motorizada ,
estando configurados los motores de impulsión izquierdo y derecho de modo que suministren potencia a los elementos tractores laterales izquierdo y derecho (108L, 108R), comprendiendo la máquina motorizada:
un sistema de control acoplado al motor de combustión y a los motores de impulsión izquierdo y derecho , estando configurado el sistema de control para controlar la aplicación de potencia desde el motor de combustión a los motores de impulsión izquierdo…
Máquina de trabajo, especialmente volquete o camión, con accionamiento eléctrico.
(17/05/2019) Máquina de trabajo, especialmente en forma de un volquete o de un camión, con un grupo de accionamiento de traslación y/o de trabajo principal que puede ser accionado por un dispositivo de accionamiento que comprende al menos un motor eléctrico y al menos un motor hidráulico que apoya al motor eléctrico , donde el motor hidráulico puede conectarse al motor eléctrico y desacoplarse del motor eléctrico por medio de un embrague , caracterizada por que está previsto un dispositivo de control para controlar el acoplamiento y el desacoplamiento del motor hidráulico en función de la velocidad de desplazamiento y/o de la velocidad de giro del grupo de trabajo principal y/o del par de accionamiento requerido del…
Vehículo de máquina de trabajo que tiene controles montados en un asiento con barra de asiento anidada.
(11/09/2018) Un vehículo de máquina de trabajo que tiene una estructura de protección del operador, un asiento posicionado en la estructura de protección del operador, y una barra de asiento montada de forma pivotante sobre la estructura de protección del operador del vehículo de máquina de trabajo, comprendiendo adicionalmente dicho vehículo de máquina de trabajo:
un primer y un segundo conjuntos apoyabrazos ajustables montados sobre una estructura del asiento de tal manera que el primer y segundo conjuntos apoyabrazos puede ser ajustados en direcciones hacia delante y hacia atrás con relación a un respaldo del asiento ;
controles de vehículo integrados con el primer y segundo conjuntos de apoyabrazos ajustables de tal manera que el ajuste del primer y…
Control remoto para una máquina o un vehículo motorizado.
(04/10/2017) Un conjunto que se puede interconectar con un módulo de control de una máquina mediante una red de área de los controladores que tiene un bus de la red de área de los controladores (CAN) en una máquina motorizada , donde el módulo de control de la máquina se configura de modo que opere los componentes de impulsión , que impulsan y dirigen la máquina motorizada , y la hidráulica , que eleva e inclina un implemento acoplado a la máquina motorizada , en respuesta a órdenes operativas, caracterizado por que el conjunto comprende:
una unidad de control "remota" portátil que incluye:
una carcasa que incluye un asidero, donde la carcasa tiene un panel de controles que incluyen un dispositivo de entrada derecho…
Mando de control articulado.
(13/09/2017) Un vehículo de construcción que tiene un cuerpo y un puesto de operario , que incluye un asiento apoyado en un bastidor , donde el puesto de operario comprende además un control manipulable por el operario ; y un primer reposabrazos que acopla, con el movimiento permitido, el control manipulable por el operario al bastidor , donde el primer reposabrazos se puede mover desde una primera orientación vertical hasta una segunda orientación vertical, en un segundo extremo (35b) de dicho reposabrazos alrededor de un primer eje horizontal , y desde una primera orientación horizontal hasta una segunda orientación horizontal, alrededor de un primer eje vertical , donde, cuando…
Un dispositivo de control y dirección para un vehículo de orugas.
(24/09/2014) Un dispositivo de control para un vehículo de orugas, que comprende una palanca de control , que un operario puede activar, sobre un fulcro (H) y que tiene un extremo libre , siendo desplazable la palanca de control a lo largo de una dirección longitudinal del vehículo entre una posición proximal (P5), más cercana al operario, y una posición distal (P1), más alejada del operario, para controlar un embrague principal del vehículo, comprendiendo adicionalmente el dispositivo de control un elemento de apoyo adecuado para estar fijado a un cuerpo del vehículo para soportar la mano de un operario cuando la mano acciona la palanca de control , caracterizado porque…
Método de control de profundidad del pescante de una excavadora.
(16/10/2013) Un método para controlar un implemento de excavación durante la excavación entre la posición por encimadel suelo y la posición por debajo del suelo,
el implemento de excavación esta acoplado a una máquina de excavación de una excavadora de oruga que tiene un motor e incluye un pescante montado pivotantemente a una posición del tractor de lamáquina de excavación de la excavadora de oruga ,
un acoplamiento que se acopla a la parte trasera de la porción del tractor de la máquina de excavación dela excavadora de oruga ,
el método comprende:
durante la operación de excavación, una operación de corte de inmersión o una combinación de ambos, la energíahidráulica induce movimiento sobre una porción activa del acoplamiento…
Dispositivo sensor, dispositivo de ajuste y aparato de trabajo.
(09/10/2013) Máquina de trabajo, especialmente un vehículo de trabajo preferentemente autopropulsado, con un brazo deextensión y con un dispositivo sensor para la determinación de la posición del brazo de extensión , con un brazo de seguimiento y un sensor de posición, actuando el brazo de seguimiento conjuntamente con el brazo de extensión y con el sensor de posición de tal manera que el sensor deposición puede determinar una posición angular del brazo de extensión, caracterizada por undispositivo de muelle el cual actúa cargando al brazo de seguimiento de tal manera que éstepermanece permanetemente en contacto con el brazo de extensión al menos durante su funcionamiento.
Vehículo para manejo de cargas.
(11/09/2013) Un vehículo de manejo de cargas configurado para ser manipulado por más de un operario y equipado con undispositivo de manejo de cargas tal como una carretilla elevadora, comprendiendo el vehículo:
una unidad de memoria que almacena una contraseña de modo normal que es fijada por adelantado;
una unidad de introducción de una contraseña ;
una unidad de indicación de modo de emergencia ; y
una unidad de control configurada para seleccionar un modo de funcionamiento del vehículo de acuerdocon una señal desde la unidad de introducción de una contraseña o la unidad de indicación de modo deemergencia , en donde la unidad…
Estabilización dinámica y control de una máquina de movimiento de tierra.
(26/08/2013) Máquina que comprende:
una primera y segunda antena de satélite montadas en una dirección longitudinal en dicha máquina y conectadas a un receptor de satélite;
una tercera antena de satélite unida a un elemento operativo de dicha máquina y conectada a un receptor de satélite;
un sensor de referencia de gravedad montado en dicha máquina;
una pluralidad de giroscopios montados en dicha máquina; y
un procesador informático para generar señales de control basándose en datos de sensor recibidos desde dichos receptores de satélite, sensor de referencia de gravedad y dicha pluralidad de giroscopios, caracterizada porque dicho procesador informático está configurado para:
determinar un estado actual de la máquina usando dichos datos de sensor;
predecir…
Procesador de señales de un dispositivo de entrada de tipo palanca de mando.
(20/05/2013) Procesador de señales para una palanca de mando que controla una electroválvula proporcional , quecomprende:
un dispositivo de entrada de tipo palanca de mando adaptado para controlar un valor de tensión de entrada dela palanca de mando (Vi) de acuerdo con una cantidad de accionamiento de una palanca de mando desde unaposición neutra ;
medios de entrada adaptados para enviar el valor promedio del valor de la tensión de entrada de la palanca demando (Vi) leído en cada instante de muestreo durante un número predeterminado de ocasiones anteriores comovalor de cálculo de la tensión de la palanca de mando (Vic);
medios de cálculo adaptados para calcular un valor de cálculo de salida (Voc) establecido de acuerdo con elvalor de cálculo de la tensión de la palanca de mando (Vic); y
medios…
Sistema para controlar un actuador que sube y baja un accesorio de excavación, y zanjadora equipada con dicho sistema.
(11/03/2013) Un sistema de control para controlar un actuador que sube y baja un accesorio de excavación , elaccesorio de excavación energizado por un accesorio de impulsión que tiene una velocidad de impulsión,por la que dicho sistema de control comprende un controlador configurado para supervisar la velocidad detracción, caracterizado porque dicho controlador se configura para generar una señal de salida de accionador parasubir el accesorio de excavación cuando la velocidad de impulsión alcanza una velocidad predeterminada.
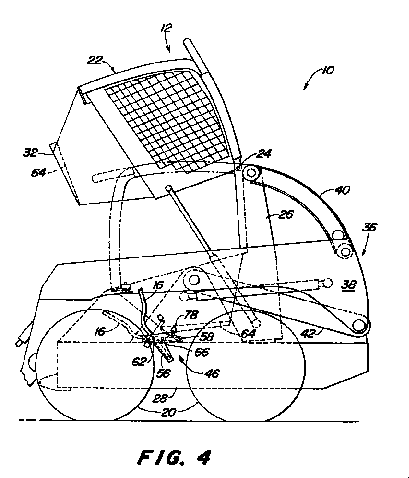
(16/09/2006) Minicargador que comprende: - un chasis ; - ruedas u orugas montadas sobre dicho chasis ; - un sistema de dirección que actúa sobre dichas ruedas u orugas; - un brazo articulado ; y - una cabina montada sobre el chasis y que tiene una estructura de soporte que presenta paredes laterales , una pared de fondo y un techo , y medios de fijación para selectivamente fijar al chasis o quitar del chasis dicha estructura de soporte , una estación de control para un operador que comprende un asiento situado dentro de dicha estructura de soporte ; - medios de control para controlar dicho sistema de dirección y dicho brazo articulado , estando situados en correspondencia de la estación de control , los medios de control siendo operativamente…
CABINA PARA MAQUINAS DE MOVIMIENTO DE TIERRA.
(01/06/2006) Cabina para máquina de movimiento de tierra del tipo que comprende: - una estructura que tiene al menos una abertura para la entrada y salida de un operador, - una estación de mando para el operador definida dentro de la estructura , desde la cual el operador puede controlar el funcionamiento de una máquina de movimiento de tierra, - al menos un panel de control de la máquina, instalado en dicha estructura y orientado hacia la estación de mando , y - una barra de seguridad fijada, de manera que pueda pivotar, internamente a dicha estructura y móvil entre una posición de seguridad en la cual dicha barra está ubicada de frente a la estación de mando y en la cual el operador está sujetado en la estación de mando ,…
CONTROL DE CADENA CINEMATICA.
(01/12/2005). Solicitante/s: PIRELLI & C. S.P.A. TELECOM ITALIA S.P.A. Inventor/es: SETTI, DARIO, SCHIFFINI, ALESSANDRO.
Control de una cadena cinemática de una cargadora sobre ruedas, con un freno, accionado por un medio de presión, y una caja de cambios con transmisión variable, siendo accionada la caja de cambios a través de un convertidor de par y conteniendo al menos dos marchas de avance y/o retroceso, que se pueden accionar en cada caso mediante un embrague de caja de cambios bajo carga, y una toma de fuerza, reduciéndose a un nivel residual la presión del embrague de la caja de cambios bajo carga, conectado adicionalmente, para la marcha de avance o la marcha de retroceso si se sobrepasa un valor predeterminado de la potencia entregada a la toma de fuerza por la caja de cambios, caracterizado porque si se sobrepasa un valor predeterminado de la potencia entregada a la toma de fuerza por la caja de cambios, se cambia la transmisión de la caja de cambios de modo que la fuerza de impulsión de la cargadora sobre ruedas se conserva de la mejor forma posible.
APARATO DE RUEDA DE CANGILONES MOVIL CON SISTEMA DE MANDO Y PROCEDIMIENTO PARA EL CONTROL AUTOMATICO DE UN APARATO DE RUEDA DE CANGILONES MOVIL.
(01/07/2004) Aparato de rueda de cangilones móvil con un aguilón delantero y con un sistema de mando para el control automático del aparato de rueda de cangilones para el rebajado de montones y/o para el amontonamiento de material a granel, en donde el aparato de rueda de cangilones presenta al menos una rueda de cangilones para recibir el material a granel, está previsto al menos un dispositivo de medida para acotar el montón y el aparato de rueda de cangilones puede trasladarse automáticamente a la posición de rebajado y/o amontonamiento deseada en función de los datos de medida medidos y/o procesados, caracterizado porque el sistema de mando y el dispositivo de medida están construidos o ejecutados de modo que se garantiza una captación de la forma actual del montón sin la realización de un viaje de medida, es decir que se puede captar una…
(01/03/2004). Ver ilustración. Solicitante/s: DEERE & COMPANY. Inventor/es: MILLER, GORDON EDWARD, SCHULT, LESLIE HAROLD.
UN VEHICULO DEL TIPO DE VEHICULO SKID-STEER LOADERS MUESTRA UNA CELDA DE CONDUCTOR GIRATORIA VERTICALMENTE, A PARTIR DE LA CUAL SE HAN PREVISTO BARRAS DE CONTROL SEPARADAS Y BARRAS DE ACCIONAMIENTO. LAS BARRAS DE ACCIONAMIENTO ESTAN APOYADAS GIRATORIAMENTE Y PREVISTAS CON UNA PALANCA DE TAL MODO, QUE LLEGAN A UNA POSICION DE OPERACION FUERA DE SERVICIO, CUANDO LA CELDA DEL CONDUCTOR SE ELEVA A UNA POSICION FUERA DE SERVICIO. DE ESTA FORMA SE CONSIGUE ACCESO A LOS ESPACIOS DEL VEHICULO, QUE SON NECESARIOS POR MOTIVOS DE MANTENIMIENTO.
VEHICULO CARGADOR DE DIRECCION DESLIZANTE.
(01/09/2003) VEHICULO DE CARGA CON DIRECCION PRO DESLIZAMIENTO QUE CONSTA DE UN CUERPO CON UN EXTREMO FRONTAL Y UNO POSTERIOR DOTADO DE UN PRIMER Y UN SEGUNDO MEDIO PROPULSOR EN CONTACTO CON EL SUELO DISPUESTO RESPECTIVAMENTE EN LOS LADOS OPUESTOS DEL VEHICULO Y EN EL CUAL EL PRIMER Y EL SEGUNDO MEDIO PROPULSOR ESTAN IMPULSADOS POR UN PRIMER Y UN SEGUNDO SISTEMA DE TRANSMISOR (T1, T2) RESPECTIVAMENTE PARA PERMITIR EL AVANCE Y CONDUCCION DEL VEHICULO CON EL MEDIO PROPULSOR EN UN LADO DE ESTE INDEPENDIENTEMENTE DEL MEDIO PROPULSOR DEL OTRO LADO DEL VEHICULO. EL PRIMER Y EL SEGUNDO MEDIO DE TRANSMISION ESTAN MONTADOS EN UNA CAJA DE TRANSMISION , DISPUESTOS EN UN LADO DEL VEHICULO, EL COMPARTIMENTO DEL…
DISPOSICION DUPLICADA DE JUEGOS DE PALANCAS DE CONTROL DE UN DISTRIBUIDOR DE EQUIPO HIDRAULICO PARA CAMIONES, PARTICULARMENTE GRUAS HIDRAULICAS.
(01/05/2003) Disposición duplicada de juegos de palancas de control de un distribuidor de equipo hidráulico para camiones, en la que dichos juegos tienen la misma disposición secuencial axial de las palancas (110a-e; 120a-e) tal como se especifica, estando provisto un juego de control directo de unas primeras palancas (110a-e), cuyos respectivos brazos están axialmente alineados con unas primeras horquillas (13a-e) para la articulación de los extremos de los correspondientes vástagos de transmisión (14a-e), y estando provisto el otro juego de control duplicado de unas segundas palancas de control (120´´a-e), cuyos brazos están axialmente desplazados respecto a unas segundas horquillas (13´a-e) para la articulación de los otros extremos de dichos vástagos…
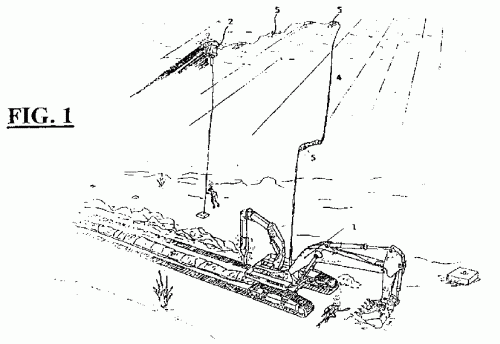
SISTEMA DE TRABAJO EN UN MEDIO HOSTIL QUE COMPRENDE UNA EXCAVADORA Y UN PUESTO DE MANDO ASOCIADO.
(01/04/2003). Ver ilustración. Solicitante/s: SOCIETE DE PRESTATIONS INDUSTRIELLES ET DE MONTAGE (S.P.I.M.). Inventor/es: PEREZ, LOUIS, SCHEIER, CLAUDE.
LA PRESENTE INVENCION SE REFIERE A UNA MAQUINA ESTANCA DOTADA DE ACTUADORES QUE PERMITE EL CONTROL A DISTANCIA CARACTERIZADA PORQUE SUS ORGANOS SENSIBLES SON ESTANCOS PARA CONSERVAR ASI LA MISMA CAPACIDAD BAJO EL AGUA QUE EN TIERRA, EN TERMINOS DE TRABAJO DE INGENIERIA, Y LLEVA DETECTORES QUE INDICAN LA POSICION DE LOS DIFERENTES EJES QUE PERMITEN JUZGAR EL ESTADO DE LA MAQUINA, INDICANDO SU DIRECCION Y SU POSICION, UMBILICALES HIDRAULICOS Y ELECTRICOS QUE TRANSPORTAN LA ENERGIA DE POTENCIA, PROCEDIENDO LAS ORDENES DE CONTROL DE LOS ACCIONADORES Y LA INFORMACION DE LOS DETECTORES, CONECTANDO ESTOS UMBILICALES LA MAQUINA QUE SE ENCUENTRA EN EL AGUA CON UN ELEMENTO EN SUPERFICIE DONDE SE ENCUENTRA EL GENERADOR DE ENERGIA, ASI COMO EL SISTEMA DE GESTION COMPLETO O PARCIAL SEGUN QUE EL PRINCIPIO DESCRITO DE CONTROL DE LA MAQUINA SE REALICE DESDE UN PONTON O DESDE UNA BOYA.
METODO PARA EL CONTROL DE LA CUCHARA DE UNA EXCAVADORA CON CABLE DE ARRASTRE.
(16/09/1997). Solicitante/s: LIEBHERR-WERK NENZING GES.MBH. Inventor/es: PFISTER, ROMAN.
LA INVENCION SE REFIERE A UN METODO PARA EL CONTROL DE LA CUCHARA DE UNA EXCAVADORA CON CABLE DE ARRASTRE CON UN BRAZO ARTICULADO GIRATORIO SOBRE UN CARRO SUPERIOR. PARA SOLUCIONAR LA TAREA DE CONTROLAR AUTOMATICAMENTE LA CUCHARA DE LA EXCAVADORA DE TAL MODO QUE SE PUEDA MANTENER EXACTAMENTE LA TOLERANCIA PARA LA ZANJA EXCAVADA, SE MIDE LA LONGITUD DEL CABLE EN EL TAMBOR DEL TORNO Y SE CORRIGE POR UN VALOR DE CORRECCION, QUE BAJO CONSIDERACION DE LA LONGITUD DEL BRAZO, DE LA DIFERENCIA ENTRE LA PERIFERIA DEL TAMBOR DEL TORNO Y LA PERIFERIA DEL RODILLO DEL BRAZO, LA LONGITUD DE DESPLAZAMIENTO DESDE EL PUNTO MEDIO DEL TORNO HASTA EL PUNTO DE ARTICULACION DEL BRAZO, LA INCLINACION DEL CARRO SUPERIOR RESPECTO AL NIVEL NORMAL Y DEL ANGULO DEL BRAZO, SE HALLA POR MEDICION DEL ANGULO EN EL PUNTO DE ARTICULACION DEL BRAZO, PARA HALLAR LA ALTURA EFECTIVA DEL GANCHO.
UNIDAD OPERATORIA DE MANEJO.
(16/12/1995) SE DESCRIBE UN UNIDAD OPERATORIA DE MANEJO, ESPECIALMENTE PARA EL CONTROL DE LA SITUACION DE UN APARATO DE MONTAJE, QUE CONTIENE UNA CARCASA CON DOS PAREDES LATERALES, QUE A SU VEZ ESTAN COMPUESTAS DE SUPERFICIES SUPERIORES CURVADAS DE FORMA CONVEXA. EN LA SUPERFICIE DE LA CARCASA SUPERIOR SE ENCUENTRA UNA RANURA NIVELADA EN LA DIRECCION DE DESPLAZAMIENTO DEL VEHICULO. ENTRE LAS PAREDES LATERALES SE EXTIENDE UN EJE PRINCIPAL, QUE ESTA APOYADO EN LAS PAREDES LATERALES. EL EJE PRINCIPAL PORTA UN ELEMENTO DE CONTROL, CUYO BORDE EXTERIOR ESTA ALINEADO EN LA DIRECCION DE LA RANURA . UN ELEMENTO DE TOPE ESTA ACOPLADO MEDIANTE ROZAMIENTO CON EL ELEMENTO DE CONTROL. DELANTE DEL BORDE EXTERIOR DEL ELEMENTO DE TOPE SE ENCUENTRA UN TOPE . EN EL ELEMENTO DE CONTROL ESTA ARTICULADO DE FORMA OSCILANTE UNA PALANCA , QUE…
VEHICULO CON DIRECCION DE CORREDERA.
(01/11/1994). Solicitante/s: J.C. BAMFORD EXCAVATORS LIMITED. Inventor/es: BAMFORD, JOSEPH CYRIL.
UN VEHICULO CON DIRECCION DE CORREDERA COMPRENDE UN CHASIS CON UN EXTREMO FRONTAL Y UNO POSTERIOR Y RUEDAS DE PROPULSION DE ENGANCHE AL SUELO DISPUESTAS EN LADOS OPUESTAS DEL CUERPO, SIENDO CADA UNA DE ELLAS SOPORTADAS EN UN EXTREMO EXTERIOR DE UN SUB EJE QUE ESTA ALOJADO, DE TAL MANERA QUE VOTE ALREDEDOR DE UN EJE DE ROTACION, EN UN MEDIO DE ALOJAMIENTO DEL SUB EJE MONTADO EN EL CHASIS DONDE CADA ALOJAMIENTO DE SUB EJE ESTA DOTADO CON UN MIEMBRO DE TRANSPORTE QUE SE PUEDE MONTAR EN EL CHASIS EN UNA POSICION SELECCIONADA DE CUALQUIERA DE LAS VARIAS POSICIONES ANGULARES ALREDEDOR DE UN EJE, ESTE ALOJAMIENTO DE SUB EJE ESTA EN UNA POSICION RELATIVA AL MIEMBRO DE TRANSPORTE DE TAL MANERA QUE EL EJE DE ROTACION DICHO, ESTA DISPUESTO ESCENTRICAMENTE RELATIVO AL DICHO EJE DE REFERENCIA.
MECANISMO DE MANDO PARA TRES FUNCIONES CON UNA PRIMERA Y UNA SEGUNDA PALANCA DE MANDO.
(01/10/1994) EN UN MECANISMO DE MANDO PARA TRES FUNCIONES CON UNA PRIMERA Y UNA SEGUNDA PALANCA DE MANDO UNIDAS ENTRE SI, SE DISPONEN DE TAL FORMA SOBRE UN RODAMIENTO DE SUSTENTACION , QUE LA PRIMERA PALANCA DE MANDO SE AJUSTA EN UN PRIMER PLANO PARA LA CONDUCCION DE UNA PRIMERA FUNCION Y EN UN SEGUNDO PLANO QUE TRANSCURRE RECTANGULARMENTE CON RESPECTO AL PRIMER PLANO, PARA LA CONDUCCION DE UNA SEGUNDA FUNCION, Y DE TAL FORMA QUE LA SEGUNDA PALANCA DE MANDO SE AJUSTA EN UN PRIMER Y TERCER PLANO, QUE TRANSCURRE PARALELAMENTE CON RESPECTO AL SEGUNDO PLANO, PARA LA CONDUCCION DE UNA TERCERA FUNCION, POR LO CUAL LA PRIMERA PALANCA DE MANDO MUESTRA UNA HORQUILLA DE CAMBIO CON DOS BRAZOS (42 Y 44) Y LA SEGUNDA PALANCA DE MANDO MUESTRA UN BRAZO DE UNION Y EL RODAMIENTO DE SUSTENTACION AGUANTA DE FORMA…
INSTALACION ANTICOLISION PARA MAQUINAS DE EXPLOTACION.
(01/05/1994). Solicitante/s: SIEMENS AKTIENGESELLSCHAFT RHEINBRAUN AKTIENGESELLSCHAFT IBEO INGENIEURBURO FUR ELEKTRONIK UND OPTIK J. HIPP + G. BROHAN. Inventor/es: HENNING, PETER, HEIMES, EDMUND, NUSSLIN, HANS-JORG, HIPP, JOHANN, HARTLIEF, FRANZ-JOSEF, FASSBENDER, FRANZ-ARNO, ECKOLDT, RALF.
SE TRATA DE UNA INSTALACION ANTICOLISION PARA EXCAVADORAS Y OTRAS MAQUINAS DE EXPLOTACION A CIELO ABIERTO QUE DISPONEN DE BRAZOS. ESTOS BRAZOS SE PROTEGEN CONTRA UNA COLISION CON EL MATERIAL O CON OTROS OBJETOS, MEDIANTE UNOS SENSORES. LOS SENSORES SON RAYOS DE LUZ QUE SE GENERAN EN UN DISPOSITIVO Y REGISTRAN LOS OBJETOS DE COLISION MEDIANTE REFLEXION. LA POSICION DEL MATERIAL O DEL OBJETO RESPECTO AL DISPOSITIVO SE MIDE Y VALORA MEDIANTE UN ORDENADOR.
METODO DE CONTROL DE FUNCIONAMIENTO Y DISPOSITIVO PARA UNA MAQUINA DE CONSTRUCCION.
(01/04/1994). Solicitante/s: KABUSHIKI KAISHA KOBE SEIKO SHO. Inventor/es: MIYAOKA, SATOSHI, 9-4-4, YAMAMOTO.
UN DISPOSITIVO DE CONTROL DE FUNCIONAMIENTO PARA UN MAQUINA DE CONSTRUCCION CONSTA DE UNA VALVULA DE CONTROL REMOTO QUE TIENE UN MIEMBRO ADAPTADO PARA DESPLAZARSE EN PROPORCION AL RECORRIDO DE UNA PALANCA DE FUNCIONAMIENTO Y QUE TIENE UNA MULTITUD DE MEDIOS ACOPLADOS CON EL MIEMBRO Y ADAPTADOS PARA PONERSE EN FUNCIONAMIENTO EN ASOCIACION CON EL MISMO. UNA PARTE DE LOS MEDIOS MULTIPLES CONSTA DE MEDIOS DE GENERACION DE SEÑALES HIDRAULICAS PROPORCIONALES PARA REDUCIR LA PRESION HIDRAULICA DE UNA FUENTE DE PRESION HIDRAULICA EN PROPORCION A UN GRADO DE MOVIMIENTO DEL MIEMBRO Y DE GENERACION DE UNA SEÑAL COMO PRESION PILOTO, Y UNA PARTE O EL RESTO DE LOS MEDIOS MULTIPLES CONSTA DE MEDIOS DE GENERACION DE SEÑALES ELECTRICAS PROPORCIONALES PARA GENERAR UNA SEÑAL ELECTRICA PROPORCIONAL AL GRADO DE MOVIMIENTO DEL MIEMBRO.
REGULACION DEL VOLUMEN DE MATERIAL MOVIDO POR UNA EXCAVADORA CON RUEDA DE CANGILONES EN LA EXPLOTACION A CIELO ABIERTO.
(16/03/1994). Solicitante/s: SIEMENS AKTIENGESELLSCHAFT RHEINBRAUN AKTIENGESELLSCHAFT IBEO INGENIEURBURO FUR ELEKTRONIK UND OPTIK J. HIPP + G. BROHAN. Inventor/es: HEIMES, EDMUND, NUSSLIN, HANS-JORG, HIPP, JOHANN, HARTLIEF, FRANZ-JOSEF, FASSBENDER, FRANZ-ARNO, ECKOLDT, RALF, HENNING, DIETER, DR.
EL VOLUMEN DE MATERIAL MOVIDO POR UNA EXCAVADORA CON RUEDA DE CANGILONES EN LA EXPLOTACION A CIELO ABIERTO, SE REGULA VARIANDO LA VELOCIDAD DE BASCULAMIENTO DEL BRAZO DE LA RUEDA Y/O SU ALTURA, TOMANDO EN CONSIDERACION LA CORRIENTE ACCIONADORA DE LA RUEDA DE CANGILONES, EL PESO Y EL VOLUMEN DEL MATERIAL EXTRAIDO Y EL VOLUMEN TEORICO DE MATERIAL SOLIDO CORTADO POR LA RUEDA DE CANGILONES.
{kind=link}
{kind=link}