Dispositivo sensor, dispositivo de ajuste y aparato de trabajo.
Máquina de trabajo, especialmente un vehículo de trabajo preferentemente autopropulsado,
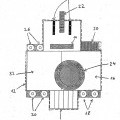
con un brazo deextensión (110) y con un dispositivo sensor (300) para la determinación de la posición del brazo de extensión(110), con un brazo de seguimiento (312) y un sensor (306) de posición, actuando el brazo de seguimiento (312)conjuntamente con el brazo de extensión (110) y con el sensor (306) de posición de tal manera que el sensor deposición (306) puede determinar una posición angular del brazo (110) de extensión, caracterizada por undispositivo de muelle (314) el cual actúa cargando al brazo de seguimiento (312) de tal manera que éstepermanece permanetemente en contacto con el brazo de extensión (110) al menos durante su funcionamiento.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E04104323.
Solicitante: DEERE & COMPANY.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: ONE JOHN DEERE PLACE MOLINE, ILLINOIS 61265-8098 ESTADOS UNIDOS DE AMERICA.
Inventor/es: ROKUSEK,RICHARD GARY, WERNER,GREGORY KEITH, BREINER,SCOTT JOSEPH, PFLIEGER,DANIEL LAWRENCE.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B66C13/18 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B66 ELEVACION; LEVANTAMIENTO; REMOLCADO. › B66C GRUAS Y PUENTES-GRUA; ELEMENTOS O DISPOSITIVOS DE TOMA DE CARGA PARA GRUAS, PUENTES GRUA, CABRESTANTES, CABRIAS O POLIPASTOS (mecanismos de enroscadura de cuerda, de cable o de cadena, dispositivos de frenado o de parada de su uso B66D; adaptados especialmente para los reactores nucleares G21). › B66C 13/00 Otras características de estructura o detalles. › Sistemas o dispositivos de control (exclusivamente para mecanismos de rodadura de cuerdas, cables o cadenas B66D 1/40).
- B66F9/075 B66 […] › B66F ELEVACION, LEVANTAMIENTO, REMOLQUE O EMPUJE, NO PREVISTOS EN OTRO LUGAR, p. ej. DISPOSITIVOS CUYA FUERZA DE LEVANTAMIENTO O EMPUJE SE APLICA DIRECTAMENTE SOBRE LA SUPERFICIE DE LA CARGA (montaje de islas artificiales sobre pilotes o soportes similares E02B 17/00; andamiajes combinados con aparatos de elevación E04G 1/22, E04G 3/28; dispositivos de elevación para encofrados deslizantes E04G 11/24; sobreelevación de edificios E04G 23/06; puntales o tirantes E04G 25/00; elevadores u otros dispositivos de elevación de escaleras E06C 7/12; puntales para minería E21D 15/00). › B66F 9/00 Dispositivos para elevación o descenso de mercancías voluminosas o pesadas con fines de carga o descarga (ascensores móviles o transportables instalados o asociados a edificios, especialmente adaptados para permitir la transferencia de una a otra parte del edificio u otra construcción B66B 9/16; grúas B66C). › Características o detalles de estructura.
- B66F9/20 B66F 9/00 […] › Medios para accionar o controlar los mástiles, las plataformas o las horquillas (toma de fuerza de la transmisión del vehículo en combinación con el sistema de propulsión del mismo B60K).
- E02F3/43 CONSTRUCCIONES FIJAS. › E02 HIDRAULICA; CIMENTACIONES; MOVIMIENTO DE TIERRAS. › E02F DRAGADO; MOVIMIENTO DE TIERRAS (extracción de turba E21C 49/00). › E02F 3/00 Dragas; Ingenios para el movimiento de tierras (para usos particulares E02F 5/00; otras máquinas o aparatos para la explotación minera E21C; construcción de túneles E21D). › Control de la posición de la cuchara o de la pala; Control de la sucesión de operaciones de accionamiento.
- E02F9/20 E02F […] › E02F 9/00 Elementos constitutivos de las dragas o de los ingenios para el movimiento de tierras, no limitados a una de las categorías cubiertas por los grupos E02F 3/00 - E02F 7/00 (dispositivos de colocación o de recogida de cables eléctricos de arrastre B66C). › Mandos; Dispositivos de control (transmisión en general F16H; control en general G05; mandos para motores eléctricos múltiples H02K, H02P).
- E02F9/26 E02F 9/00 […] › Dispositivos indicadores.
PDF original: ES-2433125_T3.pdf
Fragmento de la descripción:
Dispositivo sensor, dispositivo de ajuste y aparato de trabajo La invención se refiere a una máquina de trabajo con un brazo de extensión y con un dispositivo sensor para la determinación de la posición del brazo de extensión, con un brazo de seguimiento y un sensor de posición, actuando el brazo de seguimiento conjuntamente con el brazo de extensión y con el sensor de posición de tal manera que el sensor de posición puede determinar una posición angular del brazo de extensión.
En aparatos o vehículos de trabajo, por ejemplo en cargadores o excavadoras de cuchara hacia abajo, ha de mantenerse manualmente la altura y el ángulo, o bien en general la posición de un medio de trabajo, estimada visualmente, en una zona aproximadamente constante. Esto es fatigoso para una operario normal. En otros aparatos de trabajo, o bien vehículos, las distintas posiciones, es decir, alturas y posiciones angulares de los medios de trabajo, están ajustadas previamente de fábrica, a fin de permitir que el medio de trabajo pueda ser llevado automáticamente a determinadas posiciones, cuando el operario da la orden para ello, por ejemplo a través de apretar un pulsador, un movimiento de un mango, o bien otro movimiento sencillo. En otros aparatos de trabajo, o bien vehículos, las posiciones de descarga del medio de trabajo pueden modificarse o ajustarse a través de un operario desde el interior o el exterior de una cabina.
El documento US-A-4.015.729 muestra un sistema automático de control para una excavadora de cuchara hacia abajo, con una cuchara prevista en un brazo de extensión. El sistema de control presenta medios para la determinación del brazo de extensión, con un potenciómetro que está unido con el brazo de extensión a través de un varillaje.
El documento US-A-4.499.541 muestra un dispositivo sensor con un potenciómetro para la determinación de la desviación de la vertical de la posición angular de un brazo de extensión de una carretilla elevadora.
El problema que se plantea la invención se observa en que los dispositivos de sensores de ese tipo, dispositivos de ajuste, y máquinas de trabajo, son complejas y/o caras utilizando ese tipo de dispositivos de ajuste y/o dispositivos de sensores, y requieren varillajes complejos y/o ajustes mediante un operario.
Este problema se resuelve mediante la enseñanza de la reivindicación de patente, siendo mencionadas en las otras reivindicaciones otras caracerísticas ventajosas perfeccionadas de la solución.
Se propone una máquina de trabajo con un brazo de extensión y con un dispositivo sensor para la determinación de la posición del brazo de extensión, con un brazo de seguimiento y un sensor de posición, actuando el brazo de seguimiento conjuntamente con el brazo de extensión y con el sensor de posición, de tal manera que el sensor de posición puede determinar una posición angular del brazo de extensión, con un dispositivo de muelle que somete al brazo de seguimiento a una carga de tal forma que éste permanece constantemente en contacto con el brazo de extensión, al menos durante el funcionamiento.
El sensor de posición puede estar configurado especialmente como un sensor electrónico que está unido con el brazo de extensión, directamente o indirectamente, preferentemente de forma mecánica, por ejemplo a través de palancas, o bien especialmente a través del brazo de seguimiento. En el caso del sensor de posición, puede tratarse de un potenciómetro, o bien el sensor de posición puede presentar un potenciómetro.
La máquina de trabajo presenta preferentemente un dispositivo de ajuste. Según una configuración preferida, un dispositivo de ajuste para un posicionamiento principalmente por lo menos automático de un brazo de extensión y/o un medio de trabajo unido al brazo de extensión, por ejemplo una cuchara excavadora, una pala excavadora, una horquilla de una máquina de trabajo, especialmente de un vehículo de trabajo, puede presentar un dispositivo sensor de tal tipo que el mismo presente un montaje simplificado y una maniobrabilidad mejorada.
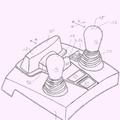
El dispositivo de ajuste puede presentar al menos un medio de ajuste, preferentemente del tipo de una palanca accionable, en especial manualmente, con al menos una posición de enclavamiento, mediante el cual pueda posicionarse el brazo de extensión, al menos un medio de accionamiento, preferentemente un conmutador, y una unidad de memoria que al accionar el medio de accionamiento almacene al menos un primer valor emitido por el dispositivo sensor, y que corresponda a la posición del brazo de extensión en ese momento, y que el dispositivo de ajuste lleve al brazo de medición al menos a una posición correspondiente al primer valor almacenado, cuando el medio de ajuste ocupe su posición de enclavamiento.
Según un perfeccionamiento de la invención, el dispositivo de ajuste puede liberar al medio de ajuste de su posición de enclavamiento cuando el brazo de extensión alcance la posición correspondiente al valor almacenado.
Si el dispositivo de ajuste presenta una instalación de procesamiento de datos, esta puede actuar de forma combinada con el medio de ajuste, de tal forma que el mismo, dependiendo de al menos una señal proporcionada por la instalación de procesamiento de datos, pueda abandonar su posición de enclavamiento, o bien la misma sea liberada.
Puede estar previsto que la instalación de procesamiento de datos calcule una altura de trabajo del medio de trabajo basándose en el valor y en una distancia del medio de trabajo hasta el centro de rotación del barazo de extensión, que estén previstos en la instalación de procesamiento de datos medios para la introducción de la altura del medio de trabajo, y que, debido a esa introducción, se calcule especialmente la posición del brazo de extensión, y se memorice un valor correspondiente.
Si además está previsto un dispositivo de visualización, el mismo puede visualizar al menos la introducción y/o al menos el valor memorizado. Ese dispositivo de visualización puede estar, por ejemplo, integrado en un dispositivo de visualización previamente existente, o estar previsto de forma separada.
En el caso de la máquina de trabajo, puede tratarse también de una máquina de trabajo estacionaria. La máquina de trabajo puede ser por ejemplo un equipo o un vehículo para la construcción, por ejemplo del tipo de un cargador, una excavadora, o también una grúa, una máquina de trabajo agrícola o industrial, como por ejemplo un tractor con un brazo de extensión, un cargador frontal, una excavadora de cuchara, o también un cargador telescópico, o bien cualquier máquina de trabajo configurada adecuadamente. Una máquina de trabajo de ese tipo pued presentar uno o varios brazos de extensión. El/los brazos de extensión puede/n estar unidos a la máquina de trabajo de forma permanente, o bien de forma desmontable.
El brazo de extensión puede estar conectado de forma giratoria por un extremo, directa o indirectamente, con un medio de trabajo, y por otro extremo, directa o indirectamente, con un soporte en un bastidor de la máquina de trabajo, o bien del apoyo previsto de la máquina de trabajo, preferentemente alrededor de al menos un eje principalmente horizontal. En el caso del medio de trabajo, puede tratarse por ejemplo de una/s cuchara de excavadora, pala de excavadora, una horquilla, un dispositivo de transporte, etc.
Un procedimiento para el posicionamiento automático de un brazo de extensión de una máquina de trabajo de ese tipo determina mediante el dispositivo sensor al menos una posición, o bien una posición angular o de rotación del brazo de extensión, memoriza al menos una posición determinada a través del dispositivo sensor, preferentemente mediante el dispositivo de ajuste o bien mediante una unidad de control o de memorización del dispositivo de ajuste, y mueve el brazo de extensión preferentemente al menos a esa posición memorizada, cuando el medio de accionamiento o bien la palanca accionable esté en su posición de enclavamiento, o bien se lleve a la misma, o se haya llevado a la misma.
De esa manera se pone a disposición un dispositivo sensor, un dispositivo de ajuste y una máquina de trabajo cuya manipulación sea menos fatigosa para un operario, y/o que sea sencilla y barata. Mediante el dispositivo sensor y/o el dispositivo de ajuste puede seguirse, o bien determinarse de forma simplificada la posición de un brazo de extensión. Para ello se ha previsto un sensor angular que presenta un brazo de seguimiento bajo la presión de un muelle, el cual está, o bien es sostenido en contacto constante, o bien en todas las posiciones, con el brazo de extensión. El brazo de seguimiento bascula cuando varía la posición del brazo de extensión,... [Seguir leyendo]
Reivindicaciones:
1. Máquina de trabajo, especialmente un vehículo de trabajo preferentemente autopropulsado, con un brazo de extensión (110) y con un dispositivo sensor (300) para la determinación de la posición del brazo de extensión (110) , con un brazo de seguimiento (312) y un sensor (306) de posición, actuando el brazo de seguimiento (312) conjuntamente con el brazo de extensión (110) y con el sensor (306) de posición de tal manera que el sensor de posición (306) puede determinar una posición angular del brazo (110) de extensión, caracterizada por un dispositivo de muelle (314) el cual actúa cargando al brazo de seguimiento (312) de tal manera que éste permanece permanetemente en contacto con el brazo de extensión (110) al menos durante su funcionamiento.
2. Máquina de trabajo según la reivindicación 1, caracterizada porque el sensor de posición (306) es un sensor electrónico, el cual está unido directamente o indirectamente, preferentemente de forma mecánica, con el brazo de extensión (110) , y/o está configurado especialmente en la forma de un potenciómetro (206b) , o bien presenta un potenciómetro (206b) .
3. Máquina de trabajo según la reivindicación 1 o 2, caracterizada por un dispositivo de ajuste para el posicionamiento, por lo menos fundamentalmente automático, de al menos el brazo de extensión (110) y/o un medio de trabajo (115) unido al brazo de extensión (110) .
4. Máquina de trabajo según la reivindicación 3, caracterizada porque el dispositivo de ajuste presenta al menos un medio de ajuste (700) , preferentemente del tipo de una palanca accionable, en especial manualmente, con al menos una posición de enclavamiento, mediante el cual pueda posicionarse el brazo de extensión (110) , al menos un medio de accionamiento (601, 602) , preferentemente un conmutador, y una unidad de memoria (510) que al accionar el medio de accionamiento (601, 602) almacene al menos un primer valor emitido por el
dispositivo sensor (300) , y que corresponda a la posición del brazo de extensión (110) en ese momento, y que el dispositivo de ajuste lleve al brazo de medición (110) al menos a una posición correspondiente al primer valor almacenado, cuando el medio de ajuste (700) ocupe su posición de enclavamiento.
5. Máquina de trabajo según la reivindicación 4, caracterizada porque el medio de ajuste (700) es liberado de una posición de enclavamiento cuando el brazo de extensión (110) alzanza la posición correspondiente al valor 25 memorizado.
6. Máquina de trabajo según una o varias de las reivindicaciones 3 a 5, caracterizada por una instalación de procesamiento de datos, la cual puede actuar conjuntamente con el medio (700) de ajuste de tal forma que este puede abandonar su posición de enclavamiento, o bien es liberado dependiendo de al menos una señal emitida por la instalación de procesamiento de datos.
7. Máquina de trabajo según la reivindicación 6, caracterizada porque la instalación de procesamiento de datos calcula una altura del medio de trabajo (115) basándose en el valor y en una distancia desde el medio de trabajo (115) hasta un centro de rotación del brazo de extensión (110) , porque están previstos medios para la introducción de la altura del medio de trabajo (115) en la instalación de procesamiento de datos, y porque la instalación de procesamiento de datos, basándose en esa introducción, puede calcular especialmente la posición del brazo de extensión (110) , y puede memorizar un valor correspondiente.
8. Máquina de trabajo según una o varias de las reivindicaciones 3 a 7, caracterizada por un dispositivo de visualización, preferentemente para visualizar la introducción y/o al menos el valor memorizado.
9. Máquina de trabajo según una o varias de las reivindicaciones precedentes, caracterizada porque el brazo de extensión (110) está conectado por un extremo, directa o indirectamente, con un medio de trabajo (115) , y por el
otro extremo, directa o indirectamente, sobre un soporte (120) previsto sobre un bastidor de la máquina de trabajo, o bien sobre la máquina de trabajo, preferentemente de forma giratoria alrededor de al menos un eje especialmente horizontal, al menos preferentemente.
Patentes similares o relacionadas:
Vehículo guiado automático, del 23 de Mayo de 2019, de BALYO: Un vehículo guiado automático que comprende: - un carro de horquilla con al menos una horquilla de soporte de carga , - un sistema de accionamiento de […]
Dispositivo de elevación para elevar un vehículo que comprende uno o más dispositivos de elevación y un sistema, y método de liberación del mismo, del 12 de Abril de 2019, de STERTIL B.V.: Un sistema de elevación para elevar un vehículo que comprende uno o más dispositivos de elevación, comprendiendo el sistema: - una estructura con […]
Dispositivo para la manipulación/traslado de palets de carga, del 2 de Abril de 2018, de MARGALEF MASIA, Juan Carlos: Dispositivo para la manipulación de palets constituido por un bastidor vertical, fijable a la zona posterior de los medios de elevación de un dispositivo, […]
Vehículo de elevación, del 1 de Febrero de 2017, de MERLO PROJECT S.R.L.: Vehículo de elevación, que comprende: - un bastidor que tiene una porción (12a) de bastidor delantera y una porción (12b) de bastidor trasera, - […]
 Elemento de mando para un vehículo industrial, del 20 de Enero de 2016, de JUNGHEINRICH AKTIENGESELLSCHAFT: Elemento de mando para un vehículo industrial con dos palancas de mando y al menos un interruptor dispuesto entre las palancas […]
Elemento de mando para un vehículo industrial, del 20 de Enero de 2016, de JUNGHEINRICH AKTIENGESELLSCHAFT: Elemento de mando para un vehículo industrial con dos palancas de mando y al menos un interruptor dispuesto entre las palancas […]
Un vehículo de manejo de materiales que tiene un aparato de control para variar el límite de velocidad de un motor de dirección, del 23 de Abril de 2014, de CROWN EQUIPMENT CORPORATION: Un vehículo de manejo de materiales que comprende: un bastidor que comprende un compartimiento del operador ; las ruedas soportadas en dicho bastidor […]
UNIDAD DE BARRA DE TRACCIÓN PARA UN CARRITO DE FÁBRICA CONDUCIDO MEDIANTE LA BARRA DE TRACCIÓN, del 8 de Febrero de 2012, de JUNGHEINRICH AKTIENGESELLSCHAFT: Unidad de barra de tracción para un carrito de fábrica conducido mediante la barra de tracción en el que la cabeza de la barra de tracción está acoplada con un eje de dirección […]
 SUMINISTRO ELÉCTRICO PARA UNA CARRETILLA INDUSTRIAL, del 11 de Abril de 2011, de JUNGHEINRICH AKTIENGESELLSCHAFT: Suministro eléctrico para una carretilla industrial, en particular para una carretilla industrial mandada por lanza, - una conexión de gran amperaje […]
SUMINISTRO ELÉCTRICO PARA UNA CARRETILLA INDUSTRIAL, del 11 de Abril de 2011, de JUNGHEINRICH AKTIENGESELLSCHAFT: Suministro eléctrico para una carretilla industrial, en particular para una carretilla industrial mandada por lanza, - una conexión de gran amperaje […]