DISPOSITIVO ELECTRONICO DE TRATAMIENTO DE DATOS-IMAGEN, PARA LA SIMULACION DEL COMPORTAMIENTO DEFORMABLE DE UN OBJETO.
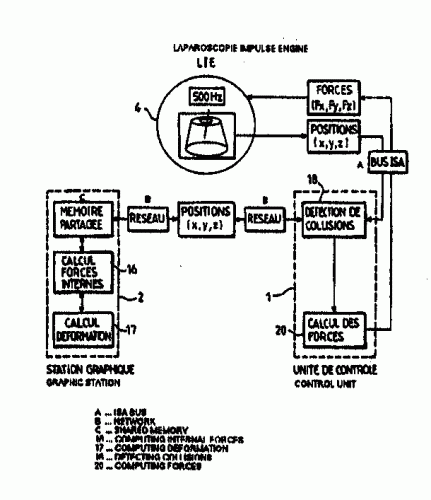
UN DISPOSITIVO ELECTRONICO COMPRENDE UN INTERFAZ DE USUARIO CON REALIMENTACION DE FUERZA (4) CONFORME A LAS REACCIONES DE UNA HERRAMIENTA,
UN MODULO DE "COLISION" (18) DESTINADO A ESTIMAR UN PUNTO DE INTERSECCION ENTRE UNA RECTA QUE MATERIALIZA UN DESPLAZAMIENTO DERIVADO DE UNA ACCION DE LA HERRAMIENTA Y EL MALLADO DE SUPERFICIE DE UN OBJETO DESIGNADO Y UN MODULO DE FUERZAS INTERNAS (16) QUE ESTABLECE UN CAMPO DE FUERZAS INTERNAS ENTRE NUDOS DE UNA PARTE AL MENOS DEL MALLADO VOLUMINICO DEL OBJETO A PARTIR DEL DESPLAZAMIENTO APLICADO A LOS NUDOS QUE PERTENECEN A LA MALLA DE SUPERFICIE QUE CONTIENE EL PUNTO DE INTERSECCION, DE CONDICIONES A LOS LIMITES Y DE TENSORES DE NUDO Y DE TENSORES DE ENLACE PROCEDENTES RESPECTIVAMENTE PARA NUDO Y CADA ENLACE DE ESTA PARTE AL MENOS, DE MATRIZ DE RIGIDEZ, Y UN MODULO DE REACCION (20) PARA DETERMINAR LA FUERZA DE REACCION DEL OBJETO QUE CORRESPONDE A SU DEFORMACION ESTIMADA A PARTIR DE LAS FUERZAS INTERNAS, PARA QUE LA FUERZA GENERADA POR EL INTERFAZ DE USUARIO (4) SEA EQUILIBRADA POR ESTA FUERZA DE REACCION.
Tipo: Resumen de patente/invención.
Solicitante: INRIA INSTITUT NATIONAL DE RECHERCHE EN INFORMATIQUE ET EN AUTOMATIQUE.
Nacionalidad solicitante: Francia.
Dirección: DOMAINE DE VOLUCEAU, ROCQUENCOURT, BOITE POSTALE 105,78153 LE CHESNAY CEDEX.
Inventor/es: COTIN, STEPHANE, RESIDENCE FLAVIA, BATIMENT 4, DELINGETTE, HERVE, RESIDENCE HADRIANA, AYACHE, NICHOLAS.
Fecha de Publicación: .
Fecha Solicitud PCT: 13 de Noviembre de 1998.
Fecha Concesión Europea: 12 de Febrero de 2003.
Clasificación Internacional de Patentes:
- B25J9/16 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › B25J 9/00 Manipuladores de control programado. › Controles por programa (control total de una fábrica, es decir, control centralizado de varias máquinas, G05B 19/418).
- G05B19/4097 FISICA. › G05 CONTROL; REGULACION. › G05B SISTEMAS DE CONTROL O DE REGULACION EN GENERAL; ELEMENTOS FUNCIONALES DE TALES SISTEMAS; DISPOSITIVOS DE MONITORIZACION O ENSAYOS DE TALES SISTEMAS O ELEMENTOS (dispositivos de maniobra por presión de fluido o sistemas que funcionan por medio de fluidos en general F15B; dispositivos obturadores en sí F16K; caracterizados por particularidades mecánicas solamente G05G; elementos sensibles, ver las subclases apropiadas, p. ej. G12B, las subclases de G01, H01; elementos de corrección, ver las subclases apropiadas, p. ej. H02K). › G05B 19/00 Sistemas de control por programa (aplicaciones específicas, ver los lugares apropiados, p. ej. A47L 15/46; relojes que implican medios anejos o incorporados que permiten hacer funcionar un dispositivo cualquiera en un momento elegido de antemano o después de un intervalo de tiempo predeterminado G04C 23/00; marcado o lectura de soportes de registro con una información digital G06K; registro de información G11; interruptores horarios o de programa horario que se paran automáticamente cuando el programa se ha realizado H01H 43/00). › caracterizado por la utilización de datos de diseño para controlar máquinas de control numérico (NC), p. ej. diseño y fabricación asistidos por computador CAD/CAM (G05B 19/4093 tiene prioridad; diseño asistido por computador CAD, en general G06F 30/00).
- G06F3/00 G […] › G06 CALCULO; CONTEO. › G06F PROCESAMIENTO ELECTRICO DE DATOS DIGITALES (sistemas de computadores basados en modelos de cálculo específicos G06N). › Disposiciones de entrada para la transferencia de datos destinados a ser procesados en una forma utilizable por el computador; Disposiciones de salida para la transferencia de datos desde la unidad de procesamiento a la unidad de salida, p. ej. disposiciones de interfaz.
Países PCT: Bélgica, Alemania, España, Reino Unido, Italia, Países Bajos, Oficina Europea de Patentes.
Patentes similares o relacionadas:
SISTEMA Y PROCEDIMIENTO PARA EL RECAMBIO DE REVESTIMIENTOS, CUYA CONFIGURACIÓN PERMITE RETIRAR E INTRODUCIR, EN FORMA AUTOMATIZADA, REVESTIMIENTOS DE UN MOLINO UTILIZADO PARA LA MOLIENDA DE MINERAL, del 2 de Julio de 2020, de MI ROBOTIC SOLUTIONS S.A: Un sistema y procedimiento para el recambio de revestimientos de un molino, cuya configuración permita la manipulación automatizada y robótica […]
Sistema y método para realizar operaciones en artefactos con cápsulas robóticas replegables, del 24 de Junio de 2020, de ABB SCHWEIZ AG: Un método para operar al menos una cápsula robótica automatizada replegable en un espacio de trabajo donde se coloca una pieza de trabajo , la […]
Aparato de perforación y método, del 13 de Mayo de 2020, de BAE SYSTEMS PLC: Aparato de perforación para avellanar un orificio perforado previamente formado en una parte , estando el orificio perforado previamente […]
Adaptador de enchufe, instrumento de ajuste y robot asociado, del 22 de Abril de 2020, de KUKA Deutschland GmbH: Adaptador de enchufe, que presenta: - una rosca , que está configurada para atornillar el adaptador de enchufe a un instrumento de ajuste , - un dispositivo […]
Método y disposición para generar y probar trayectorias de transporte de piezas de trabajo candidatas en una prensa con varias estaciones, del 22 de Abril de 2020, de GUDEL GROUP AG: Método para la generar y probar trayectorias de transporte de piezas de trabajo candidatas en una prensa de estación múltiple, comprendiendo los […]
Pasador de cizallamiento para calibración de robots, del 1 de Abril de 2020, de ABB SCHWEIZ AG: Un pasador de cizallamiento para calibrar un robot industrial y configurado de modo que se monte en un soporte del pasador de calibración en el robot […]
Procedimiento para monitorizar una línea de suministro de un robot industrial y un dispositivo de control, del 25 de Marzo de 2020, de KUKA Deutschland GmbH: Procedimiento para monitorizar una línea de suministro de un robot industrial , que tiene una o más líneas guiadas en un conducto protector , para detectar […]
CONTROLADOR PARA ROBOTS, del 19 de Marzo de 2020, de ERLE ROBOTICS, S.L: En este documento se describe detalladamente y con la inclusión de un ejemplo de implementación de la correspondiente invención, así como de las correspondientes figuras […]