CIP-2021 : B66C 13/48 : Control automático del accionamiento de las grúas para producir un ciclo de trabajo único o repetido; Control por programación.
CIP-2021 › B › B66 › B66C › B66C 13/00 › B66C 13/48[2] › Control automático del accionamiento de las grúas para producir un ciclo de trabajo único o repetido; Control por programación.
Notas[g] desde B66C 5/00 hasta B66C 15/00: Otras características comunes; Detalles
B TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES.
B66 ELEVACION; LEVANTAMIENTO; REMOLCADO.
B66C GRUAS Y PUENTES-GRUA; ELEMENTOS O DISPOSITIVOS DE TOMA DE CARGA PARA GRUAS, PUENTES GRUA, CABRESTANTES, CABRIAS O POLIPASTOS (mecanismos de enroscadura de cuerda, de cable o de cadena, dispositivos de frenado o de parada de su uso B66D; adaptados especialmente para los reactores nucleares G21).
B66C 13/00 Otras características de estructura o detalles.
B66C 13/48 · · Control automático del accionamiento de las grúas para producir un ciclo de trabajo único o repetido; Control por programación.
CIP2021: Invenciones publicadas en esta sección.
Control de grúa automatizado teniendo en cuenta errores de medición que dependen del objeto de carga y de la posición.
(05/11/2019) Procedimiento de control para un sistema de transbordo que comprende una grúa pórtico para contenedores dispuesta sobre un suelo con un carro de grúa que puede desplazarse sobre un travesaño de la grúa pórtico para contenedores con respecto al suelo y al menos un punto de transbordo de objeto de carga dispuesto sobre el suelo ,
- en el que un control de grúa , teniendo en cuenta al menos una carga de destino (L), con el que el carro de grúa está cargado en su lugar de destino (xK), adapta un lugar de destino (xK) del carro de grúa relacionado con el travesaño y un lugar de destino (xL) del punto de transbordo de objeto de carga relacionado con el suelo…
Sistema y método de elevación de material.
(08/05/2019) Un sistema de manejo de material que comprende un dispositivo de elevación de material;
teniendo dicho dispositivo de elevación de material:
un sensor para detectar un parámetro operacional asociado con dicho dispositivo de elevación de material;
un dispositivo de sujeción de carga configurado y dispuesto para sujetar una carga a dicho dispositivo de elevación de material; teniendo dicho dispositivo de sujeción de carga una etiqueta de datos que contiene datos relacionados con uno o más parámetros asociados con dicho dispositivo de sujeción de carga;
un lector configurado y dispuesto para leer dicha etiqueta de datos;
una unidad de procesamiento…
(07/12/2016). Solicitante/s: PALFINGER AG. Inventor/es: DEIMER,THOMAS.
Control de grúa para una grúa especialmente una grúa de carga, con un primer modo de servicio en el cual la grúa puede ser manejada libremente por un usuario por medio de órdenes de control y un segundo modo de funcionamiento que puede ser activado por el usuario, en el cual la geometría de grúa puede ser modificada por el control de grúa en una secuencia predeterminada de movimientos, caracterizado por que el control de grúa presenta un punto de interconexión con el usuario guiado por menú, en donde el punto de interconexión con el usuario guiado por menú presenta una función seleccionable por el usuario mediante la cual el control de grúa pasa del primer al segundo modo de funcionamiento.
PDF original: ES-2662094_T3.pdf
Sistema electrónico para el mantenimiento a distancia de una grúa.
(18/03/2015) Sistema electrónico para el mantenimiento a distancia de una grúa , comprendiendo el sistema:
- un ordenador configurado para:
• transmitir por una red de telecomunicaciones un primer mensaje de petición que lleva una orden distante para el mantenimiento de la grúa, estando el citado primer mensaje de petición sometido a un protocolo de radio-móvil de media/larga distancia;
- un dispositivo móvil configurado para:
• recibir de la red de telecomunicaciones el primer mensaje de petición y extraer del mismo la orden de mantenimiento a distancia;
• generar un segundo mensaje de petición que lleva la orden de mantenimiento a distancia, estando el citado segundo mensaje de petición sometido a…
Procedimiento para recoger una grúa.
(29/05/2014) Procedimiento para grúas desplazables a lo largo de una vía fija de desplazamiento con el que el operador puede recoger hacia él una grúa al presionar una tecla que comprende las etapas siguientes:
- enviar ondas electromagnéticas (S) entre un aparato de control manual inalámbrico asignado a la grúa para el control de grúa y la grúa ,
- recibir las ondas electromagnéticas (S) mediante una unidad receptora en la grúa para activar el recogimiento,
- determinar la posición absoluta del aparato de control manual ,
- determinar la posición absoluta de la grúa ,
- calcular órdenes de desplazamiento para minimizar la distancia de la grúa con respecto al aparato de control manual , a fin de desplazar la grúa a lo largo de su vía fija de desplazamiento , a partir de la posición absoluta del aparato de control manual…
Procedimiento para el transbordo de cargas en un almacén para contenedores.
(28/08/2013) Procedimiento para el trasbordo de cargas en un almacén para contenedores , en especial paracontenedores normalizados, en el que una grúa apiladora de contenedores carga y descarga los contenedores automáticamente en una zona de carga y descarga adyacente al almacén descargándolos de un camión estacionado en un puesto de aparcamiento de la zona de carga y descarga o colocándolos en un camión estacionado en una plaza de aparcamiento de la zona de carga y descarga , caracterizado porque después dela llegada del camión a la plaza de aparcamiento y del abandono de la plaza de aparcamiento por parte delconductor del camión , la plaza de aparcamiento se protege contra…
Dispositivo y procedimiento de regulación del desplazamiento de una carga suspendida.
(24/06/2013) Dispositivo de regulación del desplazamiento de una carga suspendida por cables de una carretilla , quees móvil según un primer eje (X) horizontal, en un aparato de elevación, comprendiendo el dispositivo unos mediospara la determinación de una longitud (L) de los cables de suspensión de la carga y unos medios para ladeterminación de un dato representativo de una velocidad (VX) de desplazamiento de la carretilla según elprimer eje (X), caracterizado porque el dispositivo de regulación calcula un primer ángulo (Θx) de oscilación dela carga y una velocidad (Θ'x) de dicho primer ángulo (Θx) de oscilación, utilizando únicamente dicha longitud(L) y dicho dato representativo de la velocidad (VX) de desplazamiento, según el primer eje (X), como únicasvariables de entrada, y utilizando…
Un método y sistema para optimizar contenedores en un bloque.
(10/04/2013) Un método para optimizar la posición de una pluralidad de contenedores en un bloque en un puerto provisto con un sistema logístico de puerto (PLS), en el que al menos una grúa está configurada para mover dichos contenedores, caracterizado por proporcionar una unidad de control de grúa (CCU) para controlar al menos dicha grúa, a dicho bloque configurada para comunicar con el sistema logístico del puerto (PLS) en el que se realizan las siguientes operaciones:
A identificar un contenedor seleccionado (i) que ha de ser movido desde una posición actual (CP) dentro de una sub-sección de dicho bloque a una nueva posición (NP) dentro de la sub-sección ,
B calcular un número de movimientos…
PROCEDIMIENTO PARA LA MANIPULACION AUTOMATICA DE UNA CARGA DE UNA GRUA CON AMORTIGUACION DEL MOVIMIENTO PENDULAR DE LA CARGA Y DISPOSITIVO PLANIFICADOR DE LA TRAYECTORIA.
(11/05/2010) Procedimiento para la manipulación de una carga, que está colgada en un cable portador de la carga, que pertenece a una grúa o a una excavadora, con un mecanismo giratorio para hacer girar a la grúa o a la excavadora, con un mecanismo de pluma basculante para el alzamiento o bien para la inclinación de un aguilón y con un mecanismo de elevación para levantar o bien para hacer descender la carga, que está colgada del cable, con una regulación controlada por medio de ordenador para la amortiguación del movimiento pendular de la carga, que presenta un dispositivo planificador de la trayectoria, caracterizado porque comprende…
SISTEMA ANTICOLESION DE GRUAS.
(16/10/2004) Sistema anticolisión de grúas, de las que constan de torre, brazo con flecha y contraflecha, carro y gancho, en el que para cada obra de construcción y por cada grúa se definen los datos de la posición instantánea de sus elementos, y de las coordenadas de los obstáculos fijos, enviándose los datos a un microprocesador que está programado de modo que considera que, cualquier grúa respecto a una grúa de inferior altura queda definida por una primera columna formada por la torre y una segunda columna imaginaria vertical formada por el espacio comprendido entre el carro y el suelo, cualquier grúa respecto a una grúa de superior altura…
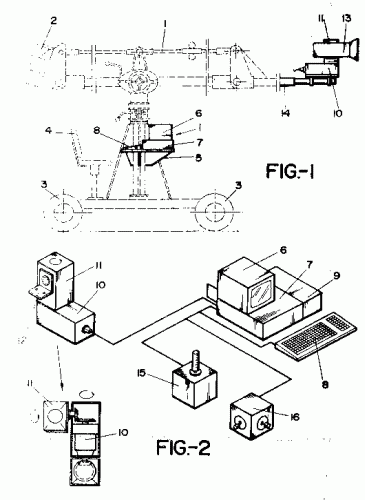
GRUA PARA FILMACIONES CINEMATOGRAFICAS CON CONTROL MANUAL Y AUTOMATICO DE VELOCIDAD Y TRAYECTORIA.
(16/08/1990). Ver ilustración. Solicitante/s: ALCIN, S.A. Inventor/es: COSTA ALVAREZ,ANTONIO, SASOT BROSA, CARLOS.
CONSISTE EN LA APLICACION DE UN ORDENADOR MONTADO SOBRE UNA ESTRUCTURA CONVENCIONAL DE USO EN LA INDUSTRIA CINEMATOGRAFICA, EN LA CUAL SE INCORPORA UNA PLUMA TELESCOPICA O NO EN CUYO EXTREMO SE MONTA UN MOTOR DE ACCIONAMIENTO HORIZONTAL Y OTRO VERTICAL DOTADOS DE UN SOPORTE EN EL CUAL SE ENCUENTRA LA PROPIA CAMARA CINEMATOGRAFICA, CONECTANDOSE LOS MOTORES CON UN VARIADOR Y UN SERVO AL CUAL LE TRANSMITEN LAS ORDENES EL ORDENADOR MEDIANTE EL ACCIONAMIENTO DE UN MANDO POR LA PALANCA O BIEN POR MANIVELAS, TENIENDO DOS MONITORES DE TELEVISION A TRAVES DE LOS CUALES SE VISUALIZA EL MENU DEL ORDENADOR Y LA TOMA VISIONADA POR LA CAMARA.
PROCEDIMIENTO Y DISPOSITIVO PARA EL CONTROL HORIZONTAL DEL PUNTO DE ARTICULACION DE CARGA DE UNA GRUA ARTICULADA.
(12/01/1984). Solicitante/s: O&K ORENSTEIN & KOPPEL AG.
PROCEDIMIENTO Y DISPOSITIVO PARA EL CONTROL HORIZONTAL DEL PUNTO DE ARTICULACION DE CARGA DE UNA GRUA ARTICULADA.COMPRENDE EL CONEXIONADO ELECTRICO DEL EMISOR DE DIRECCION DE MARCHA DE DOS POTENCIOMETROS (12A) Y (12B), QUE ESTAN DISPUESTOS DENTRO DE UN MISMO PLANO, DE LOS CUALES UNO ESTA SITUADO EN LA DIRECCION DEL EJE LONGITUDINAL DEL ELEMENTO CONDUCTOR DE PUNTA; UN SELECTOR DE DIRECCION DE MARCHA , UN GONIOMETRO , UN GENERADOR DE FUNCIONES , UN EMISOR DE FUNCIONES , UN MULTIPLICADOR , UN AMPLIFICADOR SUMADOR , UN MECANISMO DIVISOR ,UN INTEGRADOR DE VALOR TEORICO EXIGIDO , UN AMPLIFICADOR DE REVERSION , CON UNA AMPLIFICACION DE C2, UN DISPOSITIVO MULTIPLICADOR , UN SUMADOR , UN FORMADOR DE SUMAS , UN INTEGRADOR DE MAGNITUDES TEORICAS EXIGIDAS Y UN AMPLIFICADOR DE REGULACION.
DISPOSITIVO DE SUBORDINACION DE LOS MOVIMIENTOS DE LOS AGUILONES DE UNA PRIMERA Y AL MENOS UNA SEGUNDA GRUA.
(16/07/1976). Solicitante/s: HAVARD, CHARONNAT Y COVA,J.,H.Y F.
Resumen no disponible.
{kind=link}