CIP-2021 : B25J 19/00 : Accesorios adaptados a los manipuladores, p. ej. para controlar,
para observar; Dispositivos de seguridad combinados con los manipuladores o especialmente concebidos para ser utilizados en asociación con estos manipuladores (dispositivos de seguridad en general F16P; protección contra las radiaciones en general G21F).
CIP-2021 › B › B25 › B25J › B25J 19/00[m] › Accesorios adaptados a los manipuladores, p. ej. para controlar, para observar; Dispositivos de seguridad combinados con los manipuladores o especialmente concebidos para ser utilizados en asociación con estos manipuladores (dispositivos de seguridad en general F16P; protección contra las radiaciones en general G21F).
Notas[t] desde B21 hasta B32: CONFORMACION
B25J 19/02 · Dispositivos sensibles.
B25J 19/04 · · para la visión.
B25J 19/06 · Dispositivos de seguridad.
CIP2021: Invenciones publicadas en esta sección.
FUNDA DE VENTANA PARA ROBOT.
(16/02/2007). Ver ilustración. Solicitante/s: ATELIER SYSTEMES DE PROTECTION SAS. Inventor/es: PETIT, PHILIPPE, GRANDIEU, FABIEN.
Funda de ventana para un robot , teniendo dicha funda sensiblemente la forma de una manga fijada por uno de sus extremos alrededor de la ventana de una cabina y, por su otro extremo, al robot , al mismo tiempo que se permite a éste efectuar los movimientos necesarios para su tarea, separando la funda el interior de la cabina , en la que se encuentra una parte del robot , del exterior de dicha cabina , donde se encuentran las demás partes del robot , caracterizada porque la funda presenta en su periferia varios pliegues sensiblemente perpendiculares al eje de la manga, superponibles, inicialmente fijados a la ventana , habiéndose previsto unos medios para liberar, durante el primer ciclo de movimientos del robot, la cantidad de funda necesaria.
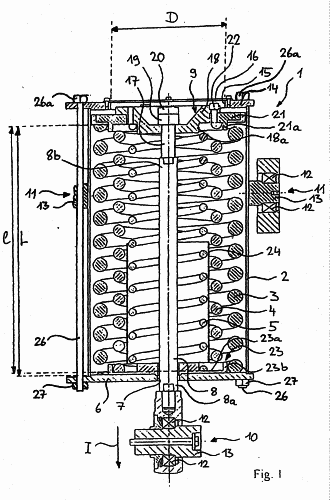
DISPOSITIVO PARA COMPENSAR EL PESO DE UN BRAZO DE ROBOT.
(01/11/2006). Ver ilustración. Solicitante/s: KUKA ROBOTER GMBH. Inventor/es: BAYER, ALBERT, BOHLKEN, WOLFGANG, BERNINGER, ALWIN.
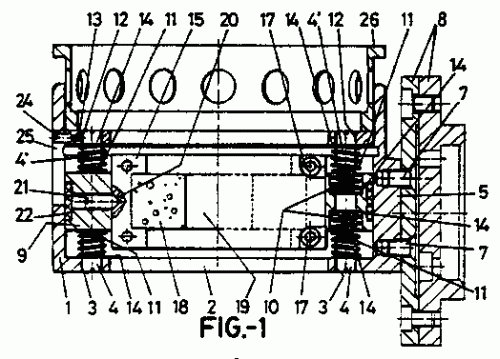
Dispositivo para compensar el peso del brazo de un robot, con un cilindro de resortes con al menos dos resortes helicoidales, teniendo el lado frontal del cilindro alejado del lado de salida del émbolo una perforación que puede cerrarse, caracterizado por un plato interior unido a un vástago de émbolo del cilindro de resortes, que actúa como apoyo para como mínimo un resorte helicoidal intercambiable del cilindro de resortes y cuyas dimensiones exteriores son menores que las dimensiones de la perforación para colocar y retirar fácilmente como mínimo un resorte helicoidal intercambiable.
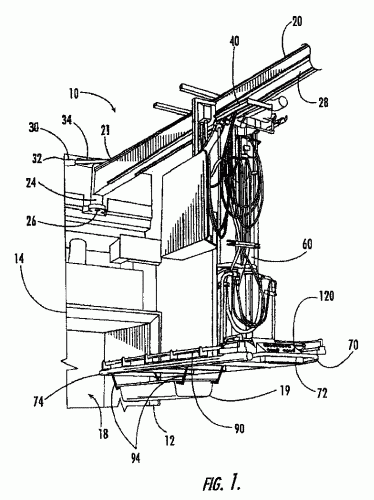
APARATO PARA LA MANIPULACION DE MIEMBROS ESTRUCTURALES.
(01/11/2006). Ver ilustración. Solicitante/s: THE BOEING COMPANY. Inventor/es: SANDERS, DANIEL G., SCHERGEN, MARK T.
Un aparato para manipular un elemento estructural, por ejemplo de 65 kg o más, y el cual es caliente, afilado, tóxico o de otro modo peligroso con: una viga que se extiende desde un primer extremo a un segundo extremo; una lanzadera en comunicación de traslación con dicha viga en una dirección que se extiende entre dichos extremos primero y segundo, un accionador de horquilla conectado a dicha lanzadera, teniendo dicho accionador de horquilla una primera porción y una segunda porción y capaz de levantar y bajar hidráulicamente dicha segunda porción, y una horquilla conectada a dicha segunda porción de dicho accionador de horquilla.
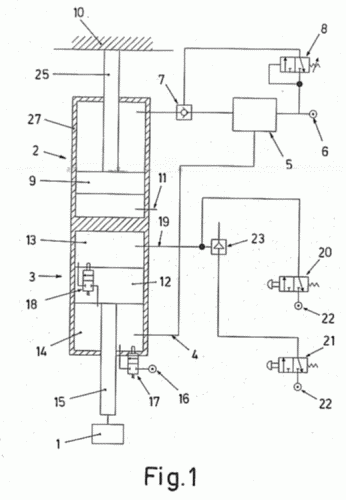
MANIPULADOR DE PESOS INGRAVIDOS.
(01/05/2006). Ver ilustración. Solicitante/s: TALLERES J. ANGEL BACAICOA, S.L. Inventor/es: BACAICOA LARRAGUETA,JACINTO ANGEL.
Manipulador de pesos ingrávidos, para el manejo de cargas con adaptación automática de estabilidad del conjunto en función del peso de las cargas y sus variaciones, comprendiendo un conjunto operativo formado por una parte actuadora de la acción a ejercer y una parte de control respecto de la que se sujetan las cargas de aplicación, y un conjunto de regulación, mediante el cual se establece una relación entre las partes (2 y 3) del conjunto operativo, determinando una regulación sobre la alimentación neumática a la parte actuadora , para variar dicha alimentación en función del peso instantáneo de las cargas suspendidas.
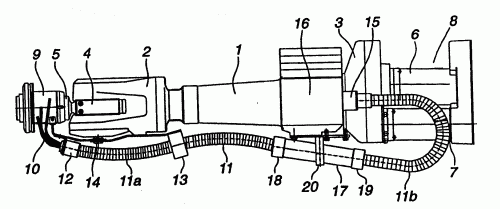
TUBO FLEXIBLE DE PROTECCION PARA ALOJAR CONDUCTOS.
(01/02/2006). Ver ilustración. Solicitante/s: DELECTRIC ELEKTROBEDARF GMBH & CO. KOMMANDITGESELLSCHAFT. Inventor/es: BALOVNEV, SERGEJ.
Tubo flexible de protección para alojar conductos para un robot industrial con miembros de brazo móviles uno con respecto a otro para la alimentación de una herramienta llevada por el robot industrial, estando subdividido el tubo flexible de protección en al menos dos segmentos de tubo flexible que están unidos giratoriamente uno con otro, caracterizado porque al menos uno de los segmentos de tubo flexible está montado de manera axialmente giratoria en sus dos extremos de segmento de tubo flexible, de modo que los conductos no se retuerzan sustancialmente al moverse los miembros de brazo.
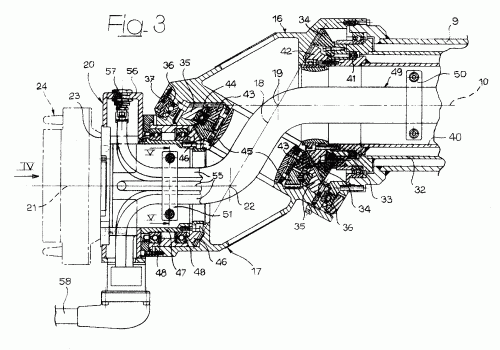
CONDUCTO DE PASO GIRATORIO EN EL EXTREMO DE UN BRAZO DE ROBOT.
(16/10/2005) Conducto de paso giratorio para medios gaseosos y/o líquidos así como para señales de control eléctricas y corriente de potencia, para su inclusión entre un brazo de robot y una herramienta, que presenta un transmisor de medios con una brida de acoplamiento canalizada radialmente, una espiga hueca canalizada axialmente y una línea de alimentación de medios que puede girar con relación a la espiga hueca , pero que la abraza de forma estanca así como un transmisor de señales y corriente con parte de estator y parte de rotor por el lado periférico de la espiga hueca , el cual, con relación a la parte de estator , está unido a la línea de alimentación de medios , en donde…
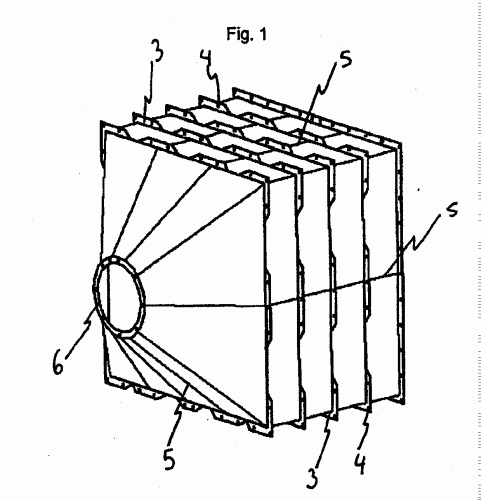
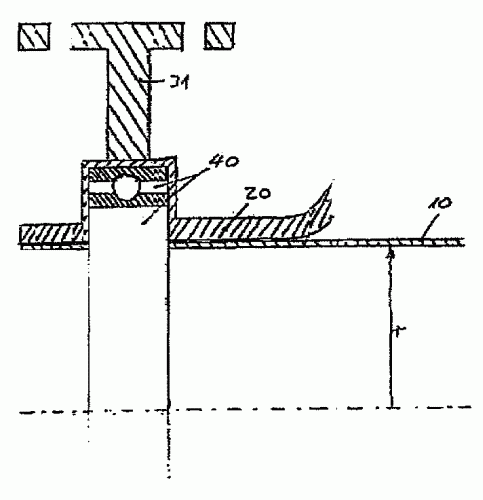
CAMARA DE TRABAJO CON UN PASO ESTANQUEIZABLE AUTOMATICAMENTE PARA UN BRAZO DE MANIPULADOR QUE SE ENGRANA EN LA CAMARA DE TRABAJO.
(16/07/2005). Ver ilustración. Solicitante/s: SCHLICK-ROTO-JET MASCHINENBAU GMBH. Inventor/es: NADICKSBERND, REINHARD.
Cámara de trabajo con un paso estanqueizable automáticamente para un brazo de manipulador que se engrana en la cámara de trabajo, con - al menos una pared de cámara de trabajo provista de una escotadura; - un tubo de paso que está insertado en la escotadura en la pared de la cámara de trabajo y está unido con ésta; - un elemento de estanqueización (20, 20) flexible, hueco, solicitable mediante una válvula con gas comprimido, que se ha de colocar de forma estanca en un brazo de manipulador mediante su al menos una escotadura dispuesta en el interior y que presenta una pared que envuelve el brazo de manipulador en todo su contorno, que puede aplicarse a la pared interior del tubo de paso cuando el elemento de estanqueización (20, 20) se solicita con gas comprimido.
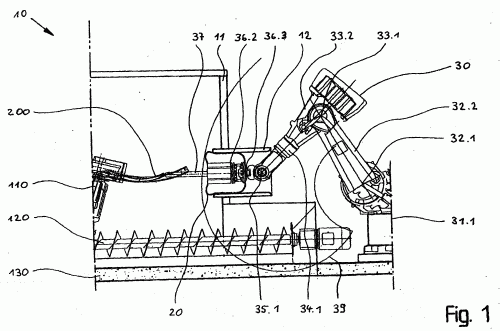
PROCEDIMIENTO Y DISPOSITIVO PARA PROTEGER UN ENTORNO EXPLOSIVO DE UN COMPONENTE ELECTRONICO A TRAVES DE INTERCAMBIO DE AIRE.
(01/02/2005). Ver ilustración. Solicitante/s: DURR SYSTEMS GMBH. Inventor/es: NOLTE, HANS-JURGEN, DR., BAUMANN, MICHAEL, MELCHER, RAINER, HAAS, JURGEN, FREY, MARCUS.
Procedimiento para proteger el entorno potencialmente explosivo de al menos un componente eléctrico, que se encuentra dispuesto al menos parcialmente en un pulverizador montado en una máquina de revestimiento y/o en la pieza de montaje de la máquina de revestimiento en la cual está montado el pulverizador , antes de la formación de una atmósfera con capacidad para explotar, caracterizado porque el aire que se encuentra en una cámara de aire , que rodea por completo el componente eléctrico, cerrada con respecto al entorno potencialmente explosivo dentro del pulverizador y/o de la pieza de montaje , es reemplazado en un período de tiempo predeterminado, que es suficiente para impedir la formación de una atmósfera con capacidad para explotar.
MECANISMO DE ACCIONAMIENTO DE UNA CARGA EN FORMA DE UN SOPORTE OSCILANTE.
(16/12/2004) Mecanismo de accionamiento de una carga que presenta la forma de un soporte oscilante, el cual comprende un dispositivo de arrastre pivotante del soporte alrededor de un eje pivote y unos medios de equilibrio de las fuerzas, particularmente de gravedad que actúan sobre el soporte oscilante, en el que los medios de equilibrio están adaptados para suministrar al eje pivote del soporte oscilante un par de compensación sinusoidal cualquiera que sea el ángulo pivotante del soporte , mientras que el dispositivo de arrastre es un dispositivo que produce un esfuerzo sensiblemente constante cualquiera que sea la posición angular del soporte ; el mecanismo comprende un bastidor de soporte del dispositivo de equilibrio y del dispositivo de arrastre ,…
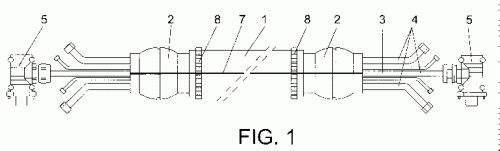
MAZO DE CABLEADO PARA ALIMENTACION DE ROBOTS INDUSTRIALES.
(01/10/2004). Ver ilustración. Solicitante/s: INTERTRONIC INTERNACIONAL, S.L. Inventor/es: GIL GANDIA,ENRIQUE.
Mazo de cableado para alimentación de robots industriales. El mazo de cableado incluye un tubo externo de protección en cuyos extremos van fijados respectivos racores , discurriendo por el interior los cables de alimentación eléctrica y otros conductos o tubos , rematado aquél en los conectores para conexión al correspondiente robot y a la fuente de alimentación correspondiente. La novedad consiste en que tanto el tubo de protección como los racores , están dotados de una abertura longitudinal que permite abrir dichos tubos y racores y acceder a los componentes internos (3 y 4) para efectuar la sustitución o reparación de los mismos, incluso del tubo y racores , sin necesidad de desmontar el conjunto del mazo respecto del robot en el que se aplique.
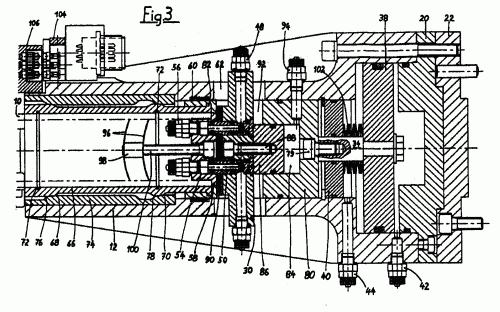
(01/07/2004) Un robot industrial que comprende un brazo superior que puede girar alrededor de un primer eje (A), una muñeca soportada por el brazo superior que puede girar alrededor de un segundo eje (B), un dispositivo de giro hueco , soportado por la muñeca que puede girar alrededor de un tercer eje (C), que en su extremo delantero comprende un disco de giro para conexión de una herramienta, al menos una línea de suministro (K) que se extiende a lo largo del brazo superior, caracterizado porque el dispositivo de giro comprende una sección de collar , con una superficie de envoltura cónica , fijada al disco de giro , a través de dicha superficie de envoltura cónica está dispuesta al menos…
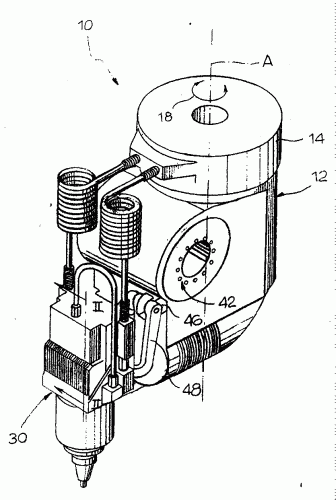
CABEZAL OPERATIVO, PARTICULARMENTE PARA UNA MAQUINA LASER.
(01/06/2004). Ver ilustración. Solicitante/s: PRIMA INDUSTRIE S.P.A. Inventor/es: GILLI, LUIGI.
Cabezal operativo, particularmente para una máquina láser, que comprende: una base , un cuerpo giratorio fijado en la base de forma que puede girar alrededor de un eje (B), un cuerpo terminal móvil con respecto al cuerpo giratorio en una dirección rectilínea que coincide con dicho eje (B), un primer motor para controlar el movimiento rotacional del cuerpo giratorio alrededor de dicho eje (B), y un segundo motor para controlar el movimiento lineal del cuerpo terminal a lo largo de dicho eje (B), caracterizado porque tanto, el primer motor como el segundo motor son motores directos montados en la mencionada base.
DISPOSITIVO DE MEDICION PARA GRUPOS CONSTRUCTIVOS, EN ESPECIAL GRUPOS CONSTRUCTIVOS DE CARROCERIAS.
(01/04/2004). Solicitante/s: DR.ING. H.C.F. PORSCHE AKTIENGESELLSCHAFT. Inventor/es: DREISSIG, BERND, KIRSCHBAUM, JIRG.
Una unidad de medición para montajes, especialmente montajes de carrocería; tiene un brazo de medición segmentada con un escáner de medición que coopera con una unidad de evaluación que memoriza coordenadas en tres dimensiones. La unidad tiene una disposición con un brazo de medición , que puede utilizarse independientemente de un una placa de medición. El brazo de medición tiene dos brazos unidos , uno de los cuales tiene un escáner de medición segmentada . Se prevén unidades de bloqueo (D) en cojinetes de rotación y de rótula , que son preferentemente accionado neumáticamente para bloquear los brazos unidos en un ajuste específico. La unidad de medición tiene un bastidor en el brazo de medición para su fijación temporal a un montaje.
ACOPLAMIENTO PARA LA UNION DE PINZAS PORTADORAS DE PIEZAS DE TRABAJO CON UN DISPOSITIVO DE MANIPULACION.
(16/03/2004). Ver ilustración. Solicitante/s: BILSING AUTOMATION GMBH. Inventor/es: BILSING, ALFRED.
EL ACOPLAMIENTO DE ACCIONAMIENTO MOTORIZADO SIRVE PARA UNIR PINZAS PORTAPIEZAS CON UN DISPOSITIVO DE MANIPULACION, EN PARTICULAR CON UN ROBOT, QUE TRANSPORTE PIEZAS DE UNA PRENSA HASTA LA SIGUIENTE. EL ACOPLAMIENTO SE COMPONE DE UNA PARTE FIJA SITUADA EN EL LADO DE ACCIONAMIENTO Y UNA PIEZA DE CONEXION POR EL LADO DE LA PINZA. PUESTO QUE NORMALMENTE SE UTILIZA UN GRAN NUMERO DE DIFERENTES PORTAPIEZAS Y DADO QUE LAS PIEZAS DE CONEXION DEL LADO DE LA PINZA TIENEN UNOS COSTES ELEVADOS, SE PROPONE QUE LA PARTE FIJA DEL ACOPLAMIENTO PRESENTE UNA PINZA DE AMARRE Y LA PIEZA DE CONEXION SEA UN TROZO DE TUBO QUE SE PUEDE CENTRAR EN LA PARTE FIJA CON UNA DISTANCIA INTERMEDIA RESPECTO A LAS PIEZAS DE PRESION (EN 68, 76) SITUADAS EN EL EXTREMO ANTERIOR DE LA PINZA DE PRESION. EL TRAMO TUBULAR SE CENTRA PREFERENTEMENTE MEDIANTE UN SEGUNDO PUNTO DE PRESION (EN 70, 78) PREVISTO CON SEPARACION RESPECTO AL PUNTO DE APRIETE ANTERIOR (EN 68, 76).
DISPOSITIVO PARA SOPORTAR UN CONJUNTO DE CABLES PARA UN ROBOT INDUSTRIAL.
(16/07/2003). Ver ilustración. Solicitante/s: ASEA BROWN BOVERI AB. Inventor/es: SPRINGMANN, STEFAN.
DISPOSTIVO DESTINADO A SOPORTAR Y GUIAR UN CONJUNTO DE CABLES ENTRE UNA PRIMERA PARTE DE MANIPULADOR Y UNA SEGUNDA PARTE DE MANIPULADOR MOVIL CON RELACION A LA PRIMERA PARTE. DICHO DISPOSITIVO CONSTA DE UN ELEMENTO PORTADOR DE CONJUNTO DE CABLES , FIJADO A LA PRIMERA PARTE DE MANIPULADOR, ALARGADO Y TUBULAR, EXTENDIENDOSE EL CONJUNTO DE CABLES LONGITUDINALMENTE EN DICHO ELEMENTO PORTADOR. DESDE UNA POSICION INICIAL, EL MOVIMIENTO DEL CONJUNTO DE CABLES SE MODIFICA POR UNA FUERZA DE RETORNO.
MEJORAS EN LOS ROBOTS MOVILES Y EN SU SISTEMA DE MANDO.
(01/10/2002) Sistema de guiado y de posicionamiento con respecto a una estación fija para robot móvil autónomo que hace intervenir por lo menos un haz infrarrojo direccional (2) emitido por la estación fija, estando provisto el robot móvil de un sistema de detección (10a, 10b) direccional de emisión infrarroja conectado a un microordenador incorporado en el mencionado robot, desplazándose el robot sobre una superficie de trabajo de forma esencialmente aleatoria, comprendiendo el microordenador un algoritmo apto para gobernar el retorno a la estación fija por desplazamiento del robot hacia la dirección…
GUIA DE CONDUCCIONES PARA UN ROBOT INDUSTRIAL DE VARIOS EJES.
(16/11/2001). Solicitante/s: KUKA SCHWEISSANLAGEN GMBH. Inventor/es: WIEDEMANN, KURT, TRAPP, JOHANN.
1. Disposición de conducciones para un robot industrial con varios ejes con una pluma y con una mano de robot, en la que las conducciones se disponen en un mazo y se sujetan con movimiento axial en un portaconducciones , al mismo tiempo, que las conducciones se prevén para el tendido a lo largo de la pluma hasta la mano del robot y que el portaconducciones posee un cojinete de giro para una disposición giratoria aproximadamente en la zona central de la pluma a una pequeña distancia de la carcasa de la pluma, caracterizada porque en las conducciones se prevén adicionalmente manguitos de manguera, que sobresalen a modo de collar.
(01/02/2001). Ver ilustración. Solicitante/s: COMAU S.P.A.. Inventor/es: FIORA, ALDO.
LA INVENCION SE REFIERE A UNA ARTICULACION PARA UN ROBOT INDUSTRIAL QUE COMPRENDE TRES ELEMENTOS SUSTENTADOS GIRATORIAMENTE EN TORNO A EJES DE ROTACION RESPECTIVOS , COPLANARES E INCLINADOS MUTUAMENTE, QUE DEJAN UN ESPACIO LIBRE EN SU INTERIOR PARA EL PASO DE CABLES DE ALIMENTACION QUE HAN DE CONECTARSE A LA HERRAMIENTA FIJADA A LA ARTICULACION ROBOTICA. ESTA ULTIMA TIENE UNA BRIDA FRONTAL PARA ACOPLAR LA HERRAMIENTA Y VARIAS SALIDAS RADIALES PARA LOS CITADOS CABLES DE ALIMENTACION , A FIN DE PERMITIR EL USO DE UNA BRIDA DE ACOPLAMIENTO DE HERRAMIENTAS DE ESTRUCTURA SIMPLIFICADA.
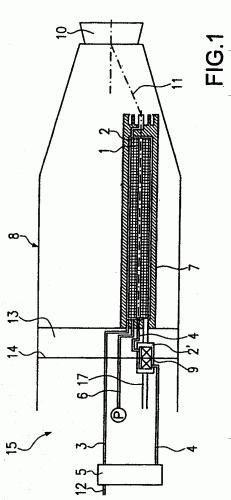
AMORTIGUADOR DE VIBRACIONES PARA HERRAMIENTA DE ROBOT.
(16/01/2001). Ver ilustración. Solicitante/s: CENTRO TECNOLOGICO ROBOTIKER. Inventor/es: APARICIO RODRIGUEZ,JOSE MARIA, IDIGORAS LEIBAR,IGONE, DORRONSORO MENDIGUREN,MIGUEL.
Amortiguador de vibraciones para herramienta de robot. El amortiguador se constituye a partir de un cuerpo de soporte , a modo de cazoleta, que es fijable al brazo de un robot. Interiormente cuenta con medios elásticos debidamente guiados y apoyados en rehundidos previstos en ambas caras de una pieza anular , la cual está montada libremente en el interior del cuerpo . Concéntricamente a la pieza existe una pieza formada por dos mitades entre las que queda situado un taco circular de goma con un paso axial para el amarre, mediante el apriete de ambas mitades, de la herramienta correspondiente. Los elementos elásticos y las piezas internas al cuerpo quedan retenidas en el interior de éste mediante una tapa cuyo apriete es variable para poder regular el tensado de los elementos elásticos . El amortiguador obtenido absorbe las vibraciones transmitidas por la herramienta acoplada, evitando que las mismas lleguen al brazo del robot en el que es aplicable el conjunto. Figura 1.
METODO Y DISPOSITIVO PARA LA CALIBRACION DE EJES DE MOVIMIENTO DE UN ROBOT INDUSTRIAL.
(16/11/1999). Ver ilustración. Solicitante/s: ASEA BROWN BOVERI AB. Inventor/es: SNELL, JOHN-ERIK.
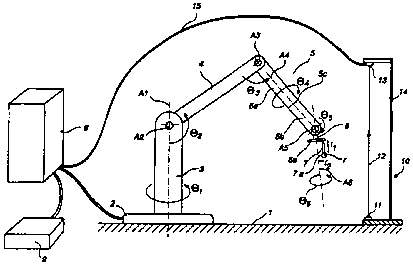
UN METODO PARA LA CALIBRACION DE UN ROBOT INDUSTRIAL . SE DISPONE DE UN DISPOSITIVO DE CALIBRACION COMPUESTO POR UN MEDIO EMISOR DE UN HAZ DE CALIBRACION DENTRO DEL RANGO DE TRABAJO DEL ROBOT, Y DE UN DETECTOR DE INTERRUPCION , EL CUAL DETECTA UNA INTERRUPCION EN EL HAZ DE CALIBRACION. DURANTE EL PROCESO DE CALIBRACION, SE MUEVE HACIA EL HAZ DE CALIBRACION A UNA HERRAMIENTA DE CALIBRACION SOSTENIDA POR LA MANO DEL ROBOT Y QUE ESTA COMPUESTA POR UNA ESFERA (7B) CON UN RADIO CONOCIDO (R). CUANDO SE DETECTA UNA INTERRUPCION EN EL HAZ DE CALIBRACION, SE LEEN Y SE ALMACENAN LAS SEÑALES DE SALIDA PROCEDENTES DE LOS TRANSDUCTORES DE POSICION DE LOS EJES DEL ROBOT. ESTE PROCESO SE REPITE UNA PLURALIDAD DE VECES CON LAS DIFERENTES CONFIGURACIONES DEL ROBOT. POR TANTO, LOS PARAMETROS DE CALIBRACION DEL ROBOT SE CALCULAN BASANDOSE EN LAS ECUACIONES CINEMATICAS DEL ROBOT, EN LAS SEÑALES DEL TRANSDUCTOR DE POSICION LEIDAS Y ALMACENADAS, Y EN EL RADIO CONOCIDO.
(16/05/1999). Solicitante/s: ASEA BROWN BOVERI AB. Inventor/es: PERSSON, STIG, BRUNMAN, BARBRO.
UN ROBOT INDUSTRIAL CON MONTAJE DE CABLE COMPRENDE UNOS CABLES DE SEÑAL Y ENERGIA QUE POR MEDIO DE ANILLOS DE ENVUELTA ESTANCA SE EXTIENDEN A TRAVES DE UNA CAJA DE CONEXION DE ENVUELTA ESTANCA CONECTADA A CADA UNIDAD MOTRIZ DE FORMA QUE LOS RESPECTIVOS CABLES SIRVEN A TODAS LAS UNIDADES MOTRICES CONECTADAS A LO LARGO DEL CABLE. DENTRO DE LA RESPECTIVA CAJA DE CONEXION, LOS CABLES ESTAN DESENVAINADOS, POR LO QUE EL NUMERO DE CONDUCTORES QUE CONCIERNEN A LA UNIDAD MOTRIZ EN CUESTION SON DESVIADOS COMO LOS OTROS CONDUCTORES, SIN UNION, JUNTO CON LA PARTE RESTANTE DE LOS CONDUCTORES DESVIADOS QUE PUEDEN PASAR A LA SIGUIENTE UNIDAD MOTRIZ.
METODO Y DISPOSITIVO PARA LA CALIBRACION DE LOS EJES DE MOVIMIENTO DE UN ROBOT INDUSTRIAL.
(16/10/1998). Solicitante/s: ASEA BROWN BOVERI AB. Inventor/es: SNELL, JOHN-ERIK.
EN UN METODO DE CALIBRACION PARA UN ROBOT INDUSTRIAL , UNA HERRAMIENTA DE CALIBRACION SOPORTADA POR LA MANO DEL ROBOT SE PONE EN CONTACTO CON UN CUERPO DE CALIBRACION ESFERICO CON UN RADIO CONOCIDO. POSTERIORMENTE, LAS SEÑALES DE SALIDA DE LOS TRANSDUCTORES DE POSICIONAMIENTO DE LOS EJES DEL ROBOT SON LEIDAS Y ALMACENADAS. ESTE METODO SE REPITE UNA PLURALIDAD DE VECES CON DIFERENTES CONFIGURACIONES DEL ROBOT. POSTERIORMENTE, LOS PARAMETROS DE CALIBRACION DEL ROBOT SE CALCULAN COMENZANDO A PARTIR DE LAS ECUACIONES CINEMATICAS DEL ROBOT, DE UN MODELO DE RELACIONES ENTRE LA POSICION AXIAL Y LA SEÑAL DEL TRANSDUCTOR DE POSICION, DEL RADIO CONOCIDO DEL CUERPO DE CALIBRACION Y DE LAS SEÑALES TRANSDUCTORES DE POSICION LEIDAS Y ALMACENADAS.
METODO Y DISPOSITIVO PARA LA CALIBRACION DE EJES DE MOVIMIENTO DE UN ROBOT INDUSTRIAL.
(16/10/1997). Solicitante/s: ASEA BROWN BOVERI AB. Inventor/es: SNELL, JOHN-ERIK.
EN UN METODO DE CALIBRACION PARA UN ROBOT INDUSTRIAL , UNA HERRAMIENTA DE CALIBRACION SOPORTADA POR EL BRAZO DEL ROBOT SE PONE EN CONTACTO CON LAS SUPERFICIES LATERALES OPUESTAS PAREADAS DE UN CUERPO DE CALIBRACION CON UNA LONGITUD DE EJE YA CONOCIDA. POSTERIORMENTE, LAS SEÑALES DE SALIDA DE LOS TRANSDUCTORES DE POSICION DE LOS EJES DEL ROBOT SON LEIDAS Y ALMACENADAS. EL METODO SE REPITE UNA PLURALIDAD DE VECES CON DIFERENTES CONFIGURACIONES DEL ROBOT. POSTERIORMENTE, LOS PARAMETROS DE CALIBRACION DEL ROBOT SE CALCULAN COMENZANDO A PARTIR DE LAS ECUACIONES CINEMATICAS DEL ROBOT, DE UN MODELO DE LA RELACION ENTRE LA POSICION AXIAL Y LA POSICION DE LA SEÑAL TRANSDUCTORA, DE LAS LONGITUDES CONOCIDAS DEL EJE DEL CUERPO DE CALIBRACION, Y DE LA POSICION LEIDA Y ALMACENADA DE LAS SEÑALES DEL TRANSDUCTOR DE POSICION.
ROBOT DE CENTRO DE MOVIMIENTO REMOTO MEJORADO PARA CIRUGIA.
(01/08/1997) UN APARATO USADOS PARA AYUDAR UN CIRUJANO EN CIRUGIA SE DIVIDE EN DOS PARTE PROXIMA Y DISTANTE. EL APARATO TIENE UN NUMERO DE ENLACES RIGIDOS QUE GIRAN ALREDEDOR DE PIVOTES (A UN INSTRUMENTO QUIRURGICO, EN UN PUNTO DE TRABAJO (CMOT) PROXIMO A UN PACIENTE PERO ALEJADO DEL PACIENTE. LOS ENLACES COOPERAN DE MANERA PARA MOVER EL MANIPULADOR SOBRE UN CENTRO DE MOVIMIENTO (CMOT) CON GRADOS DESACOPLADOS ORTOGONALMENTE DE LIBERTAD RESULTA EN EL PUNTO DE TRABAJO. LA PARTE PROXIMA DEL APARATO ESTA FIJADA AJUSTABLEMENTE A UN OBJETO FIJO, COMO UNA MESA DE OPERACION , MIENTRAS QUE LA PARTE DISTANTE DEL APARATO SUJETA EL INSTRUMENTO . CIERTOS ENLACES QUE PUEDEN AJUSTARSE EN LONGITUD, MUEVEN LA PARTE DISTANTE RESPECTO DE LA PARTE PROXIMA DEL APARATO. DE ESTA MANERA, EL PUNTO DE TRABAJO DEL MANIPULADOR Y EL RADIO DE TRABAJO SE CAMBIAN SIN MOVER LA PARTE PROXIMA.…
ROBOT INDUSTRIAL CON UNIDADES DE ENGRANAJE REDUCTOR INTEGRADAS.
(01/07/1997). Solicitante/s: COMAU S.P.A.. Inventor/es: MAULETTI, ENRICO.
SE PROPORCIONA UN ROBOT INDUSTRIAL CON UNA PLURALIDAD DE ELEMENTOS ARTICULADOS UNOS A OTROS, CUYA ROTACION SE ACCIONA POR RESPECTIVOS MOTORES ELECTRICOS MEDIANTE UNIDADES DE ENGRANAJES REDUCTORES, QUE ESTAN INTEGRADAS EN LA ESTRUCTURA DE ESTOS ELEMENTOS.
(01/04/1997) LA INVENCION SE REFIERE A UNA CONEXION GIRATORIA DISPUESTA PARA SER MONTADA SOBRE EL BRAZO DE UN ROBOT Y DISEÑADA ADICIONALMENTE PARA SOPORTAR UNA MORDAZA SOLDADORA O ALGO MAS TAL COMO UN DISPOSITIVO DE AGARRE. LA CONEXION GIRATORIA ESTA TAMBIEN DISEÑADA PARA TENER LA CAPACIDAD DE TRANSFERIR UN MEDIO LIQUIDO O GASEOSO. LA INVENCION SE CARACTERIZA EN QUE COMPRENDE UN TAMBOR CILINDRICO GIRATORIO QUE TIENE UNA PIEZA DE SUJECION EN UN EXTREMO PARA MONTARSE SOBRE EL BRAZO DE UN ROBOT O SIMILAR, UN MANGUITO DE ACOPLAMIENTO NO GIRATORIO ALREDEDOR DEL TAMBOR , UN PAR DE ANILLOS DE CONTACTO CONCENTRICOS AISLADOS ENTRE SI Y DEL MANGUITO DE ACOPLAMIENTO…
MANIPULADOR DE VARIOS EJES.
(01/08/1996). Solicitante/s: KUKA ROBOTER GMBH. Inventor/es: ZIMMER, ERNST.
LA INVENCION SE REFIERE A UN MANIPULADOR DE VARIOS EJES, CON UN BASTIDOR Y UN PLATO HORIZONTAL ACCIONADO Y DISPUESTO SOBRE EL MISMO EN TORNO A UN EJE BASICO GIRATORIO . EL BASTIDOR PRESENTA UNA COLUMNA DE APOYO CENTRAL, CONCEBIDA COMO APOYO DEL PAR Y DEL RODAMIENTO DEL PLATO HORIZONTAL . EL ACCIONAMIENTO PARA EL PLATO HORIZONTAL SE HA DISPUESTO ESENCIALMENTE A LA ALTURA O ENCIMA DE LA PLACA BASE DEL PLATO HORIZONTAL , EN EL QUE EL MOTOR ESTA SITUADO SOBRE EL PLATO HORIZONTAL , Y LA PARTE DEL ACCIONAMIENTO DE LA TRANSMISION , ESTA DISPUESTA A LA ALTURA O ENCIMA DE LA PLACA BASE DEL PLATO HORIZONTAL . CON ESTA ESTRUCTURA, LAS PARTES DEL ACCIONAMIENTO PARA EL PLATO HORIZONTAL SON MAS ACCESIBLES PARA FINES DE MONTAJE Y DE MANTENIMIENTO, POR LO QUE SE OBTIENE TAMBIEN PARA EL RODAMIENTO UN ANCHO DE APOYO RELATIVAMENTE REDUCIDO Y CON ELLO UN AHORRO DE ESPACIO.
(16/03/1996). Solicitante/s: COMAU S.P.A.. Inventor/es: ZONA, MAURO, BETTINARDI, MARCO.
EL ARMAZON DE UN BRAZO DE UN ROBOT ARTICULADO TIENE UNA ESTRUCTURA EN FORMA CONCHIFERA, LA CUAL DESEMPEÑA UNA FUNCION DE CARGA Y ALOJA UN MODULO CONTENIENDO LA UNIDAD MOTOR Y TRANSMISION AFIN.
DISPOSITIVO QUE PERMITE EL MANTENIMIENTO Y/O EL MONTAJE AUTOMATICO DE PIEZAS QUE COMPRENDE BRAZOS PORTAHERRAMIENTAS MONTADOS SOBRE UN BLOQUE DE SOPORTE.
(01/08/1995). Solicitante/s: REGIE NATIONALE DES USINES RENAULT S.A.. Inventor/es: PEYROUX, JEAN-DANIEL.
DISPOSITIVO QUE PERMITE EL MANTENIMIENTO Y/O EL MONTAJE AUTOMATICO DE LAS PIEZAS, QUE COMPRENDE BRAZOS PORTAHERRAMIENTAS, CIRCUITOS DE FLUIDO DE POTENCIA QUE ACCIONAN ESTAS HERRAMIENTAS, Y CIRCUITOS DE CONTROL DE ESTOS CIRCUITOS DE POTENCIA, CARACTERIZADO EN QUE COMPRENDE UN BLOQUE DE SOPORTE SOBRE EL QUE SE FIJAN MECANICAMENTE LOS BRAZOS , AL MENOS UN DISTRIBUIDOR DE FLUIDO MONTADO SOBRE EL BLOQUE DE SOPORTE, UNA PARTE DE LOS CIRCUITOS DE POTENCIA Y DE CONTROL DE LOS BRAZOS QUE ESTA INTEGRADA EN EL BLOQUE DE SOPORTE, PROLONGANDOSE LA OTRA PARTE EN LOS BRAZOS.
MECANISMO DE LIBERACION UMBILICAL.
(16/05/1995) UN MOTOR LINEAL QUE SE PUEDE MOVER A LO LARGO DE UN ESTATOR SUSTANCIALMENTE PLANO (P). HAY ACOPLADAS UNAS FUENTES ACCIONADORAS ELECTRICAS, MECANICAS Y NEUMATICAS AL MOTOR LINEAL A TRAVES DE UN CORDON UMBILICAL (C). UN MIEMBRO DE PROTECCION CONTRA LOS TIRONES , NORMALMENTE ENLAZADO AL MOTOR LINEAL, ES ARRASTRADO POR EL MOTOR LINEAL A LA POSICION DESEADA A LO LARGO DE LA PLACA. EL MIEMBRO DE PROTECCION CONTRA LOS TIRONES SE DESACOPLA ENTONCES DEL MOTOR LINEAL Y ES MAGNETICAMENTE ATRAIDO (O POR VACIO) Y TEMPORALMENTE "FIJADO" A LA PLACA. UNA PORCION DEL CORDON UMBILICAL QUEDA SUJETA AL MIEMBRO DE PROTECCION CONTRA LOS TIRONES EN UN PUNTO INTERMEDIO…
UN MONTAJE PARA LOS CABLES ELECTRICOS DE UN BRAZO DE ROBOT ARTICULADO.
(16/04/1995). Solicitante/s: COMAU S.P.A.. Inventor/es: ZONA, MAURO, BETTINARDI, MARCO.
LOS CABLES ELECTRICOS DE UN BRAZO DE ROBOT ARTICULADO TIENEN FORMA DE CORDONES HELICOIDALES QUE SE ALARGAN Y ACORTAN RESPECTIVAMENTE DURANTE EL GIRO DEL BRAZO.
ROBOT EN PARTICULAR DE LAVADO.
(16/04/1995). Solicitante/s: ETUDES TECHNIQUES-FRANCHE COMTE-ALSACE ETFA SARL. Inventor/es: BAILLS, JEAN-MICHEL.
ROBOT PARA EL TRATAMIENTO DE PIEZAS Y EN PARTICULAR PARA SU LAVADO, QUE COMPRENDE UNA TORRECILLA CIRCULAR ARRASTRADA EN ROTACION, MONTADA POR ENCIMA DEL RECINTO O SIMILAR RECIBIENDO LAS PIEZAS A TRATAR; UN ARBOL POSICIONADO VERTICALMENTE SOBRE DICHA TORRECILLA CIRCULAR, QUE CONSTA DE UN MOVIMIENTO DE TRASLACION VERTICAL ALTERNATIVO Y UN CARRO QUE SOPORTA DICHO ARBOL Y QUE PUEDE DESPLAZARSE SOBRE UNA VIA DE GUIA PREVISTA DIAMETRALMENTE SOBRE DICHA TORRECILLA CIRCULAR, CARACTERIZADO EN QUE DICHO ARBOL ESTA HUECO Y LA ALIMENTACION DE LIQUIDO DE LAVADO SE EFECTUA A TRAVES ESTE ARBOL, LA CABEZA MONTADA EN UNO DE SUS EXTREMOS ESTA DOTADA DE MEDIOS DE TRATAMIENTO DE DICHAS PIEZAS, SIENDO ESTOS MEDIOS POR EJEMPLO UNA O VARIAS BOQUILLAS DE PULVERIZACION EVENTUALMENTE ORIENTABLES.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}