CIP-2021 : B25J 5/02 : que se desplazan sobre un camino-guía.
CIP-2021 › B › B25 › B25J › B25J 5/00 › B25J 5/02[1] › que se desplazan sobre un camino-guía.
Notas[t] desde B21 hasta B32: CONFORMACION
B TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES.
B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES.
B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06).
B25J 5/00 Manipuladores montados sobre ruedas o sobre soportes móviles (B25J 1/00 tiene prioridad; manipuladores de control programado B25J 9/00).
B25J 5/02 · que se desplazan sobre un camino-guía.
CIP2021: Invenciones publicadas en esta sección.
Conjunto de plataforma de trabajo automatizada.
(15/07/2020) Un conjunto de plataforma de trabajo automatizada para dar servicio a distancia a una porción inferior de una vasija , comprendiendo el conjunto de plataforma:
una plataforma de trabajo genéricamente horizontal circular que se extiende en un primer plano;
un trazado orbital que se extiende en un segundo plano sustancialmente paralelo al primer plano y en el que la plataforma de trabajo es soportada rotativamente para hacer rotar la plataforma de trabajo en el primer plano, incluyendo el trazado orbital un anillo de mecanismo de arrastre circunferencial que incorpora unos dientes de engranaje…
SISTEMA Y PROCEDIMIENTO PARA EL RECAMBIO DE REVESTIMIENTOS, CUYA CONFIGURACIÓN PERMITE RETIRAR E INTRODUCIR, EN FORMA AUTOMATIZADA, REVESTIMIENTOS DE UN MOLINO UTILIZADO PARA LA MOLIENDA DE MINERAL.
(02/07/2020). Solicitante/s: MI ROBOTIC SOLUTIONS S.A. Inventor/es: SALAMANCA POBLETE,Hugo, BAEZA RAMIREZ,Luis.
Un sistema y procedimiento para el recambio de revestimientos de un molino, cuya configuración permita la manipulación automatizada y robótica de revestimientos de molinos para la molienda de minerales en procesos de conminución, cuya configuración y operación permita mejorar la tarea de manipulación al poseer un mayor grado de libertad y/o flexibilidad en sus movimientos, proporcionando al procedimiento un mayor grado de certeza y eficacia, por lo tanto optimizando el tiempo de detención del molino por mantenimiento, así como evitar los riesgos a los que se pueda ver sometido el personal de mantenimiento, el sistema comprende al menos una estructura de soporte, al menos un sistema de alimentación y desplazamiento de revestimientos, al menos un sistema manipulador robótico de los revestimientos, al menos una herramienta de manipulación de revestimientos, al menos un sistema de visión artificial y al menos un sistema de control.
Manipulador de alimentos en un almacén.
(13/05/2020) Un manipulador de alimentos (1a) en un almacén ; comprendiendo dicho almacén una pluralidad de estaciones de almacenamiento (1b) en las que al menos una está asociada con uno de dichos alimentos (1a); estando dicho manipulador caracterizado porque comprende
- una estación de análisis de dicho alimento (1a);
- un miembro de recogida de dicho alimento (1a) de dicha estación de almacenamiento (1b) adecuado para colocar dicho alimento (1a) en dicha estación de análisis ;
- un transportador de dicho manipulador adecuado para colocar dicho miembro de recogida , dicha estación de análisis y dicho dispositivo de inspección en correspondencia…
Sistema y método para separar un componente tubular.
(13/05/2020) Sistema para separar un componente tubular que es adecuado para construir una estructura de soporte y que puede tener una tubería longitudinal con extremos de tubería que son abiertos en ambos lados, con
- un módulo de transporte móvil que comprende una plataforma de recepción con un dispositivo de sujeción de tubería que puede adaptarse a una variedad de diámetros de tubería, que está diseñado para recibir y montar de manera estable el componente tubular de modo que un primer extremo de tubería del componente tubular, cuyo eje longitudinal está orientado verticalmente, puede llevarse a aplicación separable y segura con el dispositivo de sujeción de tubería, y
- una disposición de separación que
- está montada en una estructura de soporte tal que puede al menos elevarse y bajarse,
-…
(08/04/2020) Sistema de traslación para un dispositivo de manejo que cuente al menos con un elemento de guía y al menos con un cuerpo de carro que dicho elemento de guía pueda trasladar de forma guiada como mínimo en un plano del desplazamiento y en el cual o sobre el cual pueda fijarse o esté fijado al menos un dispositivo de manejo que cuente con al menos un elemento de accionamiento con la capacidad de transmitir un movimiento al cuerpo del carro , como mínimo a lo largo del elemento de guía , y con al menos una guía de cables conectada al cuerpo del carro que comprenda una carcasa de la guía de cables constituida por una pluralidad de módulos de carcasa , engarzados a modo de eslabones, que puedan hacer girar, en cada caso, dos módulos…
Sistema para cuatro robots y personas en colaboración en un entorno de trabajo en estrechamiento.
(04/03/2020). Solicitante/s: THE BOEING COMPANY. Inventor/es: MILLER,JOHN ERIC, MATHIS,DENNIS R.
Un aparato para el soporte de robots y personas en colaboración en un entorno de trabajo en estrechamiento, que comprende:
una plataforma base ;
una plataforma de trabajo posicionada por encima de la plataforma base para soporte de una o más personas, en el que la plataforma de trabajo es más estrecha que la plataforma base y la plataforma de trabajo se posiciona con relación a la plataforma base para proporcionar áreas para la colocación de una pluralidad de robots en uno o más lados de la plataforma de trabajo ;
en el que los robots están soportados sobre la plataforma base de modo independiente de la plataforma de trabajo , de modo que el movimiento de la plataforma de trabajo no afecte a las posiciones de los robots ,
en el que la plataforma base y la plataforma de trabajo se configuran para posicionarse dentro de un conjunto de fuselaje de un avión.
PDF original: ES-2785974_T3.pdf
Máquina herramienta para la mecanización por arranque de virutas de una pieza de trabajo así como conjunto de soporte de husillo para el empleo en una máquina herramienta de este tipo.
(06/11/2019) Conjunto de soporte de husillo para el empleo en una máquina herramienta, con:
- una sección de alojamiento del brazo articulado que se puede disponer o bien instalar sobre una bancada de la máquina herramienta,
- un primer brazo articulado alojado en la primera sección de alojamiento del brazo articulado de forma pivotable alrededor de un primer eje de rotación (R1),
- un segundo brazo articulado alojado en el primer brazo articulado de forma pivotable alrededor de un segundo eje de rotación (R2),
- un brazo de soporte del husillo alojado en el segundo brazo articulado de forma giratoria alrededor de…
Sistema de robot con raíl de soporte y plataforma de robot.
(30/10/2019) Sistema de robot con las siguientes características:
a. el sistema de robot comprende un sistema de desplazamiento con un raíl de soporte a la manera de un elemento constructivo alargado orientado en una dirección de extensión principal y una plataforma de robot desplazable a lo largo de la dirección de extensión principal del raíl de soporte para montar un robot ,
b. el sistema de robot comprende un robot montado sobre la plataforma de robot , caracterizado por las características siguientes:
c. el raíl de soporte está configurado con por lo menos un raíl de guiado metálico previsto…
Plataforma aislada de trabajo para humanos para posicionamiento estabilizado de robótica colaborativa.
(21/08/2019). Solicitante/s: THE BOEING COMPANY. Inventor/es: MILLER,JOHN ERIC, MATHIS,DENNIS R.
Un aparato para posicionamiento estabilizado de robótica colaborativa, que comprende:
una plataforma base;
una plataforma de trabajo posicionada en relación a la plataforma base para soportar uno o más humanos;
y
una pluralidad de robots soportados sobre la plataforma base independientemente de la plataforma de trabajo;
la plataforma de trabajo se aísla de los robots para posicionamiento estabilizado de los robots , de tal manera que la plataforma base y la plataforma de trabajo juntas proporcionan un espacio de trabajo colaborativo para los robots y los humanos, en el que la plataforma base y la plataforma de trabajo se configuran para ser posicionadas dentro de un ensamble de fuselaje de una aeronave.
PDF original: ES-2754809_T3.pdf
Pórtico de robot doble de transmisión por correa.
(15/05/2019). Solicitante/s: THE BOEING COMPANY. Inventor/es: MILLER,JOHN ERIC, MATHIS,DENNIS R.
Un aparato para posicionar robots utilizando un pórtico, que comprende:
una plataforma base;
una plataforma de trabajo situada por encima de la plataforma base para soportar uno o más humanos;
una pluralidad de robots soportados sobre la plataforma base de forma independiente de la plataforma de trabajo; y
al menos un pórtico situado por encima de la plataforma base y adyacente a la plataforma de trabajo, para soportar y posicionar los robots a lo largo de la plataforma de trabajo,
en donde el al menos un pórtico comprende una pluralidad de pórticos en múltiples lados de la plataforma de trabajo.
PDF original: ES-2740876_T3.pdf
Instalación de proyección de producto de revestimiento.
(12/02/2019) Instalación de proyección de producto de revestimiento sobre objetos , como carrocerías de vehículos automovilísticos, desplazados por una cinta transportadora paralelamente a un eje de traslado (X4) e incluye, al menos, una parte de base y una parte móvil en comparación con la parte de base, esta instalación incluye:
- al menos, un primer robot de proyección multieje , dedicado a la proyección de producto de revestimiento y que incluye una carretilla elevadora además de un brazo poliarticulado , articulado sobre esta carretilla elevadora por una extremidad proximal y cuya extremidad opuesta a la carretilla elevadora soporta un proyector de producto de revestimiento,
- al menos, un robot de…
Cabina de pintura compacta y procedimiento.
(21/12/2018) Procedimiento de operación de degradación en una cabina de pintura , incluyendo la cabina de pintura una pluralidad de robots , presentando la pluralidad de robots unos cometidos individuales relacionados con la aplicación de un recubrimiento a un objeto , incluyendo el objeto unas superficies exteriores (204a) y unas superficies interiores (204b), en el que algunos de los robots presentan un cometido individual en relación con la aplicación del recubrimiento a las superficies exteriores (204a) del objeto , y algunos de los robots presentan un cometido individual en relación con la aplicación del recubrimiento a las superficies interiores (204b) del objeto ,
comprendiendo el procedimiento:
a) detectar un mal funcionamiento en uno…
Instalación de revestimiento y procedimiento de funcionamiento correspondiente.
(17/05/2017) Instalación de revestimiento para el revestimiento de componentes, en particular para pintar componentes de aeroplano, con
a) una primera cabina de revestimiento , en particular para revestir unos componentes de aeroplano de grandes dimensiones,
b) un robot de revestimiento de varios ejes, que posiciona un aparato de revestimiento, en particular, un pulverizador rotativo,
c) una segunda cabina de revestimiento , en particular para revestir unos componentes de aeroplano de pequeñas dimensiones ,
d) un eje de desplazamiento para desplazar el robot de revestimiento a lo largo del eje de desplazamiento , discurriendo el eje de desplazamiento dentro de la primera cabina de revestimiento y extendiéndose en la segunda cabina de revestimiento , de manera que el robot de revestimiento …
(20/07/2016) Instalación de procesamiento de alimentos con un sistema de limpieza dotado de una vía de guía que discurre a lo largo del contorno exterior de la instalación a limpiar y un brazo de robot trasladable a lo largo de la vía de guía , en el cual está montada al menos una boquilla para descargar un agente de limpieza sobre la instalación y el cual presenta al menos dos grados de libertad para el movimiento de la boquilla, caracterizada por que la vía de guía está montada por encima de la instalación a limpiar y el brazo de robot va guiado colgando de la vía de guía , por que el brazo de robot está formado por dos alas , extendiéndose una primera ala desde…
Módulo de transferencia de un carro robotizado entre unos elementos de guiado no dispuestos extremo contra extremo y adyacentes.
(16/03/2016) Módulo de transferencia de un carro robotizado entre unos elementos de guiado no dispuestos extremo contra extremo y adyacentes, comprendiendo este módulo de transferencia y estos elementos de guiado unos medios de guiado en traslación del carro a lo largo de sus ejes longitudinales respectivos (A10, A12), comprendiendo el módulo de transferencia un cuerpo que se extiende a lo largo de su eje longitudinal (A10), estando este cuerpo unido a un bastidor por medio de un soporte , unos medios de puesta en traslación del cuerpo a lo largo del eje longitudinal (A10) del módulo y unos medios de puesta en rotación del…
Sistema de tratamiento para tratar una pieza móvil.
(08/04/2015) Sistema de tratamiento para tratar una pieza móvil por medio de un robot industrial , que puede acoplarse rígidamente, de forma intermitente, a la pieza y/o a una unidad portapieza móvil , en el que el robot industrial está en la posición operativa desacoplada soportado por un dispositivo portador , que puede moverse por medio de una unidad de tracción que actúa con tracción activa independientemente de la pieza, y está en la posición operativa acoplada montado de forma flotante con respecto al dispositivo portador por medio de un sistema de alojamiento flotante , caracterizado por que
una unidad…
Sistema de robot para colocar un raíl.
(03/12/2014) Sistema de robot, que comprende
- un raíl y
- un robot , el cual está configurado para poder ser desplazado en una dirección de movimiento, guiado por el raíl ,
- consistiendo el raíl en una pluralidad de segmentos de raíl (30a a 30f) dispuestos en la dirección de movimiento y
- estando el robot configurado para manipular dichos segmentos de raíl (30b a 30f) y para prolongar el raíl mediante la colocación de otros segmentos de raíl (30b a 30f) contra un respectivo último segmento de raíl del raíl ya existente,
caracterizado por que
- está previsto un miembro de tracción montado en el robot , en particular un cable de tracción , el cual discurre a lo largo…
Célula robotizada diseñada especialmente para el corte y fresado de tableros de piedra natural y similares.
(21/10/2014) 1. Célula robotizada, especialmente diseñada para el corte, fresado y pulido de piezas de piedra natural y similares, esencialmente caracterizada porque comprende:
Una mesa que soportará las piezas a trabajar, dotada de un sistema basculante para facilitar la carga de tableros o piezas a laborar , realizándose ésta con el tablero en posición vertical.
Una estructura suficientemente robusta , para soportar el puente también robusto en cuanto a soportar esfuerzos y vibraciones, el cual en su parte inferior tendrá la brida adecuada para soportar el robot antropomorfo de forma adecuada.
A su vez en la brida del sexto eje del robot , irá instalado un cabezal de corte o fresado formado por un motor eléctrico con un sistema de platos…
(11/12/2013) Dispositivo de pintura para pintar unos componentes , en particular para pintar carrocerías de automóvileso partes de las mismas, con
a) un robot de pintura de varios ejes , que posiciona un pulverizador,
b) un control de robot para controlar el robot de pintura , y
c) un armario de control , que contiene el control de robot ,
d) una tecnología de aplicación con componentes para medios de revestimiento utilizados con frecuencia ycomponentes para medios de revestimiento utilizados con poca frecuencia,
en el que
e) el armario de control forma una columna de soporte, que soporta mecánicamente el robot de pintura ,
f) los componentes de la tecnología…
Manipulador robotizado, para movimiento de cargas.
(08/07/2013) Manipulador robotizado para movimiento de cargas, que puede disponerse en un soporte (S) en posición de recogida y suspendido de una grúa o puente-grúa (P) en posición operativa.
Consta de, al menos, una columna integrada por una pluralidad de porciones en disposición telescópica; un brazo articulado a la última de dichas porciones telescópicas y portador de la correspondiente garra, horquilla o elemento acoplado en su punta; un carro que, acoplado con rodadura sobre los perfiles estructurales de la grúa o puente-grúa (P), permite rodar con precisión en los movimientos transversal, longitudinal y de elevación; un anclaje , que relaciona entre sí la columna y el carro mediante un sistema de amarre rápido entre ellos; y un sistema de enganche rápido…
Prensa dobladora con dispositivo de alimentación y procedimiento para su utilización.
(19/03/2013) Instalación de producción para el conformado por doblado de placas o piezas , con una prensa dobladora ,con una viga de mesa fija y con una viga de prensado en un bastidor de la máquina en unas guías conrelación a la viga de la mesa mediante un sistema de accionamiento , y con unas herramientas de doblado dispuestas sobre superficies frontales enfrentadas entre sí de la viga de la mesa y de la viga de prensado , y conun manipulador que se puede desplazar sobre una pista de desplazamiento en una trayectoria paralela a unaextensión longitudinal de las vigas de la mesa y de doblado para efectuar la transferencia de piezas entre undispositivo de alimentación o almacenamiento para las…
Dispositivo para el traslado de productos.
(05/03/2013) Dispositivo para la transferencia de productos , por ejemplo productos alimenticios, de un sector derecogida a un sector de entrega , compuesto de un dispositivo de transporte para trasladar losproductos en un sentido de transporte (F) uno tras otro al sector de recogida , y al menos un primer y unsegundo robot que, visto en el sentido de transporte (F), están distanciados recíprocamente dispuestos en elentorno del dispositivo de transporte y que incluyen, en cada caso, una base de robot y un efector final móvil respecto de la base de robot para la recogida y entrega de los productos , caracterizadoporque la distancia (D) entre la base de robot del primer robot y la base de robot del segundo robot puede ser ajustada.
Procedimiento y dispositivo para realizar una operación de trabajo sobre una pieza de trabajo en movimiento.
(16/04/2012) Procedimiento para realizar una operación de trabajo sobre una pieza de trabajo que avanza de forma continua sobre un transportador , mediante un robot industrial que se desplaza junto a la pieza de trabajo durante un recorrido conjunto a través de un segmento operativo, en que el robot industrial es conducido a lo largo de un carril longitudinal que discurre junto al transportador , y una base del robot industrial está acoplada de forma rígida a un soporte de la pieza de trabajo durante todo el recorrido y está situada de forma flotante con respecto a un vehículo que recorre el carril longitudinal ,
caracterizado por que
el robot industrial dispone de una herramienta intercambiable en que, al inicio del recorrido conjunto, se…
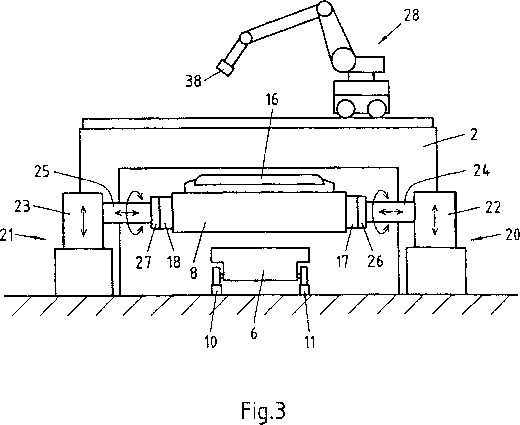
SISTEMA DE PROCESAMIENTO DE UN COMPONENTE EN MOVIMIENTO Y PROCEDIMIENTO PARA POSICIONAR EL SISTEMA DE PROCESAMIENTO.
(25/05/2010) Sistema de procesamiento para operar sobre un componente en movimiento mediante un robot industrial temporalmente acoplable de forma rígida a un componente y/o a una unidad móvil portadora de componentes , en que el robot industrial en su posición desacoplada es transportado por un dispositivo portador que, mediante una unidad motriz que funciona con transmisión activa, se puede mover con independencia del componente, y, en su posición acoplada , queda montado de forma flotante en relación con el dispositivo portador por medio de un cojinete flotante, caracterizado por que en la posición acoplada del robot industrial la unidad motriz no ejerce transmisión activa sobre el dispositivo portador , y el dispositivo portador se mueve con el componente en movimiento y/o con la unidad portadora…
CELULA DE PRODUCCION FLEXIBLE PARA EL MECANIZADO DE COMPONENTES, EN PARTICULAR DE COMPONENTES DE CARROCERIAS DE VEHICULOS.
(02/11/2009). Ver ilustración. Solicitante/s: THYSSENKRUPP DRAUZ NOTHELFER GMBH
AUDI AG. Inventor/es: RUBMANN,KLAUS, STEIN,HANS, SAUERMANN,WERNER, SCHMIDT,JOHANN-ANTON.
Célula de producción flexible para el mecanizado de componentes, en particular de componentes de carrocerías de vehículos, con los siguientes componentes:
a) junto a una estación de trabajo y en por lo menos un lado opuesto a ella está situado un robot de mecanizado equipado con una herramienta ;
b) cada robot de mecanizado se puede desplazar sobre un puente situado junto a la estación de trabajo en la dirección de su eje longitudinal;
c) un dispositivo de amarre para el componente se puede desplazar a la estación de trabajo desde una posición de aparcamiento debajo del puente en dirección transversal al eje longitudinal del puente ;
d) antes y/o después de la estación de trabajo y junto al puente está situado un dispositivo de elevación y giro que se puede acoplar mediante elementos de acoplamiento al dispositivo de amarre , y con el cual se puede elevar el dispositivo de amarre y girarlo alrededor de un eje paralelo al eje longitudinal del puente.
DISPOSITIVO PARA SUJETAR UN ROBOT SOBRE UN BRAZO DE SOPORTE.
(01/05/1995). Solicitante/s: COMAU S.P.A.. Inventor/es: ZONA, MAURO, BETTINARDI, MARCO.
UN ROBOT ARTICULADO TIENE UNA SUJECCION SIMILAR A UNAS PINZAS CON UNA PARTE CENTRAL Y DOS PARTES PIVOTANTES QUE SE ARTICULAN CON LA PARTE CENTRAL , LA SUJECCION SIRVE PARA CONECTAR EL ROBOT A UN BRAZO DE SOPORTE DE FORMA FIJA O DESLIZABLE.
(01/04/1993). Solicitante/s: AB VOLVO. Inventor/es: SORENSEN, LEIF.
EL INVENTO SE REFIERE A UN APARATO MANIPULADOR PARA TRANSPORTAR Y MANIPULAR MERCANCIAS . EL APARATO INCLUYE UN EXPOSITOR O ESTRUCTURA SIMILAR; UN RAIL DE TRANSPORTE O TRAYECTO QUE LLEVA EL EXHIBIDOR; UN CARRITO QUE PUEDE DESPLAZARSE A LO LARGO DEL RAIL (10 MEDIANTE UN ELEMENTO MOTOR SEPARADO ; Y UN DISPOSITIVO DE SUJECION QUE ESTA MONTADO PIVOTANTEMENTE SOBRE EL CARRITO Y DESTINADO A MANIPULAR LA MERCANCIA . EL INVENTO SE CARACTERIZA PORQUE EL APARATO CONSTA ADEMAS DE UN EJE GUIA PIVOTANTE DE SECCION TRANSVERSAL NO REDONDEADA Y QUE SE EXTIENDE EN PARALELO AL RAIL DE TRANSPORTE . UN SEGUIDOR ESTA DISPUESTO GIRATORIAMENTE SOBRE EL CARRITO Y CONECTADO AL EJE GUIA PARA MOVERSE DESLIZANTEMENTE A LO LARGO DEL MISMO PERO CON TORSION RIGIDA EN UNA DIRECCION RADIAL. UNA TRANSMISION DE ROTACION ANGULAR ESTA DISPUESTA ENTRE EL SEGUIR Y EL DISPOSITIVO DE SUJECION.
DISPOSICION DE SOPORTE DE TIRAS Y APARATO PARA DISTRIBUIR TRAMOS DE TIRAS, EN PARTICULAR PARA CARROCERIAS DE VEHICULOS A MOTOR.
(16/05/1992). Ver ilustración. Solicitante/s: DRAFTEX INDUSTRIES LIMITED. Inventor/es: GOEDDERZ, DIETER.
DISPOSICION DE SOPORTE DE TIRAS Y APARATO PARA DISTRIBUIR TRAMOS DE TIRAS, EN PARTICULAR PARA CARROCERIAS DE VEHICULOS A MOTOR. LA DISPOSICION COMPRENDE UN DISPOSITIVO QUE RECIBE UN TRAMO ENROLLADO DE UNA BANDA FLEXIBLE DE OBTURACION, GUARNICION, ACABADO O GUIA DE CRISTALES, PARA SER DISTRIBUIDA MEDIANTE DESENROLLADO. EL APARATO SE CARACTERIZA POR UNA SERIE DE DISPOSITIVOS DE SOPORTE, CADA UNO CON SU CORRESPONDIENTE TRAMO DE BANDA, UN DISPOSITIVO DE DISTRIBUIDOS DE BANDA CON DISPOSITIVOS DE ACCIONAMIENTO , PARA IMPULSAR LA BANDA, Y UN DISPOSITIVO TOMADOR PARA RECIBIR Y SUJETAR LAS DISPOSICIONES DE SOPORTE.
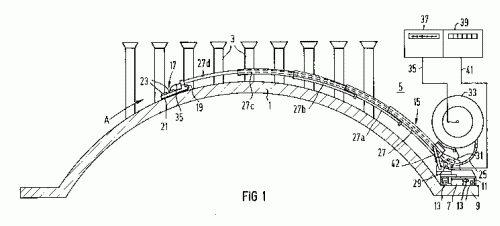
DISPOSITIVO Y PROCEDIMIENTO PARA LA VERIFICACION DE UNA PARED DE UN DEPOSITO.
(01/03/1992). Ver ilustración. Solicitante/s: SIEMENS AKTIENGESELLSCHAFT. Inventor/es: KRAUSS, PETER, BAUER, RAINER, GUGEL, GEORG, HAEFNER, MARTIN.
DISPOSITIVO Y PROCEDIMIENTO PARA LA VERIFICACION DE UNA PARED DE UN DEPOSITO, ESPECIALMENTE DE LA TAPA DE UN DEPOSITO A PRESION DE REACTOR. SE PROPONE UN PROCEDIMIENTO CON UN DISPOSITIVO , EN EL QUE EN UN CARRO MOVIL SOBRE UN CARRIL DE TRASLACION ESTA ARTICULADO UN BRAZO TELESCOPICO MOVIL CON UN APARATO DE PRUEBA , ESTANDO CONFIGURADOS LOS MIEMBROS (27, 27A, 27B, 27C, 27D) DEL BRAZO TELESCOPICO EN FORMA DE ARCO Y TENIENDO UNA SECCION TRANSVERSAL EN FORMA DE U. EL BRAZO TELESCOPICO SE EXTIENDE Y RETRAE POR MEDIO DE UNA MANGUERA DE EMPUJE RESISTENTE A LA TRACCION Y RIGIDA A LA PRESION.
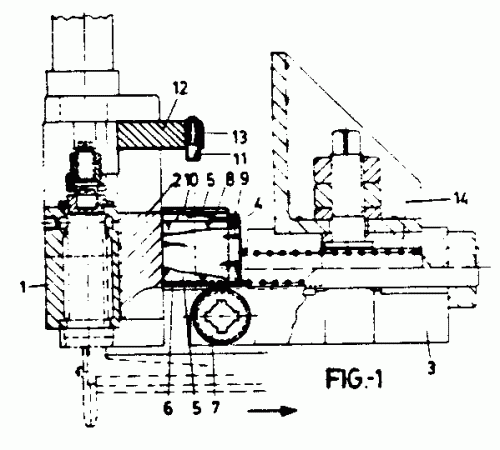
MECANISMO DE AVANCE INTERMITENTE SINCRONIZADO PARA UN CABEZAL OPERADOR RESPECTO DE LA CORRESPONDIENTE LINEA DE ALIMENTACION EN CONTINUO.
(01/02/1992). Ver ilustración. Solicitante/s: RUBIO SANZ, PABLO CESAR CAÑERO SUANES, FRANCISCO. Inventor/es: RUBIO SANZ, PABLO CESAR.
MECANISMO DE AVANCE INTERMITENTE SINCRONIZADO PARA UN CABEZAL OPERADOR RESPECTO DE LA CORRESPONDIENTE LINEA DE ALIMENTACION EN CONTINUO. EL CABEZAL ESTA ESTABLECIDO SOBRE UN CARRO DESPLAZABLE HORIZONTALMENTE EN CONTRA DE LA TENSION DE UN RESORTE EN EL SENO DE UN SOPORTE FIJO , INCORPORANDO UNA CAJA DETERMINANTE DE UN ALOJAMIENTO VERTICAL EN EL QUE JUEGA UN EMBOLO PREVISTO INFERIORMENTE DE UNA CREMALLERA SUSCEPTIBLE DE ENGRANAR CON UN PIÑON MONTADO EN EL SOPORTE FIJO Y QUE RECIBE PERMANENTEMENTE EL MOVIMIENTO DE LA LINEA DE ALIMENTACION, TENDIENDO EL CITADO EMBOLO A MANTENERSE DESACOPLADO DEL PIÑON POR EFECTO DE UNA PAREJA DE FLEJES Y ENCLAVANDOSE CON EL MISMO CUANDO RECIBE SUPERIORMENTE EL ACCIONAMIENTO DE UN PISON ASOCIADO AL GRUPO VERTICALMENTE DESPLAZABLE DEL CABEZAL.
MANIPULADOR PARA PIEZAS, CARGAS Y OBJETOS DIVERSOS.
(01/06/1990) MANIPULADOR PARA PIEZAS, CARGAS U OBJETOS DIVERSOS DEL TIPO QUE INCLUYE UN BASTIDOR PORTADOR DE POR LO MENOS UN ORGANO MOTOR QUE OCUPA UN PUESTO FIJO; UNA PRIMERA VIA DE GUIADO SOPORTADA POR EL BASTIDOR; UN EQUIPO MOVIL MONTADO SOBRE LA PRIMERA VIA Y COMPUESTO POR UN CARRO PRINCIPAL Y UN CARRO SECUNDARIO QUE LLEVA UN ORGANO DE FUNCION; UNA SEGUNDA VIA DE SOPORTE DEL CARRO SECUNDARIO, PARALELA A LA PRIMERA VIA, INTERRUMPIDA Y MATERIALIZADA EN CADA PUESTO FIJO POR UN SEGMENTO DE VIA SOPORTADO POR EL ORGANO MOTOR CORRESPONDIENTE; CARACTERIZADO PORQUE: -EL BASTIDOR SOPORTA UNA PRIMERA VIA DE GUIADO CONSTITUIDA POR DOS CORREDERAS A LAS CUALES ESTA SUSPENDIDO EL CARRO PRINCIPAL , -LA SEGUNDA VIA ESTA CONSTITUIDA POR UN CARRIL INTERRUMPIDO…
MODULO ROBOTIZADO PARA MANIPULACION INDUSTRIAL.
(16/02/1989) 1. MODULO ROBOTIZADO PARA MANIPULACION INDUSTRIAL ESENCIALMENTE CARACTERIZADO POR INCORPORAR UN HUSILLO A BOLAS, QUE MONTADO CON LIBERTAD DE GIRO SOBRE SU CARCASA A TRAVES DE COJINETES Y RECIBIENDO EL MOVIMIENTO DEL CORRESPONDIENTE GRUPO MOTOR, LO TRASMITE A DOS TUERCAS MONTADAS SOBRE EL MISMO Y SUSTANCIALMENTE DISTANCIADAS, TUERCAS CADA UNA DE LAS CUALES ESTAN RELACIONADAS CON UN PATIN, A TRAVES DE UN EJE TRANSVERSAL, ESTANDO ESTOS DOS PATINES MONTADOS SOBRE UNA MISMA GUIA LONGITUDINAL PARALELA AL HUSILLO, HABIENDOSE PREVISTO QUE SOBRE CADA UNO DE ESTOS EJES QUE RELACIONAN TUERCA Y PATIN, SE MONTEN CON LIBERTAD DE GIRO DOS RUEDAS DENTADAS EN LAS QUE SE ESTABLECE UNA CORREA ASIMISMO DENTADA, CON LA ESPECIAL PARTICULARIDAD DE QUE DICHA CORREA DENTADA Y EN UN PUNTO DE SU SECTOR INFERIOR, SE FIJA INAMOVIBLEMENTE A LA CARCASA DEL APARATO,…
{kind=link}
{kind=link}
{kind=link}
{kind=link}