Manipulador robotizado, para movimiento de cargas.
Manipulador robotizado para movimiento de cargas, que puede disponerse en un soporte (S) en posición de recogida y suspendido de una grúa o puente-grúa (P) en posición operativa.
Consta de, al menos, una columna (1) integrada por una pluralidad de porciones en disposición telescópica; un brazo (2) articulado a la última de dichas porciones telescópicas y portador de la correspondiente garra, horquilla o elemento acoplado en su punta; un carro (4) que, acoplado con rodadura sobre los perfiles estructurales de la grúa o puente-grúa (P), permite rodar con precisión en los movimientos transversal, longitudinal y de elevación; un anclaje (3), que relaciona entre sí la columna (1) y el carro (4) mediante un sistema de amarre rápido (6) entre ellos; y un sistema de enganche rápido (5) que, dispuesto relacionando entre sí el gancho (G) que pende del carro (4) y la última de las porciones telescópicas de la columna (1), permite el libre giro entre el manipulador y la grúa o puente-grúa (P) mientras está enganchado.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201031922.
Solicitante: JATORMAN, S.L.
Nacionalidad solicitante: España.
Inventor/es: REPARAZ RAZKIN,Marcos.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B25J5/02 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › B25J 5/00 Manipuladores montados sobre ruedas o sobre soportes móviles (B25J 1/00 tiene prioridad; manipuladores de control programado B25J 9/00). › que se desplazan sobre un camino-guía.
- B25J5/04 B25J 5/00 […] › en los que el camino-guía es también móvil, p. ej. del tipo puente rodante.
- B66C1/00 B […] › B66 ELEVACION; LEVANTAMIENTO; REMOLCADO. › B66C GRUAS Y PUENTES-GRUA; ELEMENTOS O DISPOSITIVOS DE TOMA DE CARGA PARA GRUAS, PUENTES GRUA, CABRESTANTES, CABRIAS O POLIPASTOS (mecanismos de enroscadura de cuerda, de cable o de cadena, dispositivos de frenado o de parada de su uso B66D; adaptados especialmente para los reactores nucleares G21). › Elementos o dispositivos de toma de carga fijados a los mecanismos de subida, bajada o arrastre de las grúas o adaptados para ser utilizados con estos mecanismos y transmitir los esfuerzos a los objetos o grupos de objetos (medios para unir cables o cuerdas F16G 11/00).
- B66C1/10 B66C […] › B66C 1/00 Elementos o dispositivos de toma de carga fijados a los mecanismos de subida, bajada o arrastre de las grúas o adaptados para ser utilizados con estos mecanismos y transmitir los esfuerzos a los objetos o grupos de objetos (medios para unir cables o cuerdas F16G 11/00). › por medios mecánicos.
Fragmento de la descripción:
El objeto del invento se refiere, en general, a un sistema para manipulación de cargas y, más concretamente, a un manipulador robotizado para movimiento de cargas cuya 5 utilización adquiere pleno sentido cuando se trata de manipular piezas pesadas y voluminosas.
Los equipos de fabricación y manipulación de piezas pesadas y voluminosas son por naturaleza un elemento potencialmente generador de riesgos.
Por otra parte, la exigencia de trabajar con cargas elevadas hace necesario máquinas 10 robustas, con actuadores firmes y con soluciones de amarre resistente y flexible a la hora de posicionar las piezas.
El tamaño de las piezas a fabricar/manipular también obliga generalmente a que los equipos de fabricación tengan que desplazarse por el contorno de la pieza a lo largo de toda la planta, con el consiguiente riesgo de atropellos y colisiones.
En definitiva, tanto la fabricación de este tipo de piezas como todo lo relacionado con su manipulación es una fuente de riesgos por lo que se requieren:
equipos de manipulación diseñados para soportar las grandes cargas e inercias provocadas por sus movimientos;
actuadores o equipos de generación que suministren una elevada potencia con 20 una gran precisión; y
sistemas de mando capaces de controlar el movimiento preciso de la carga,
protegiendo al operario y a la carga durante toda la amplitud del movimiento; y
vigilar el entorno, por si se diera una pérdida de control.
El objetivo del invento es dotar a los equipos de fabricación y manipulación de cargas pesadas y voluminosas de soluciones tecnológicas que reduzcan los riesgos relativos a la seguridad, ergonomía, higiene y salud de los trabajadores y con su empleo se garantiza un aumento de productividad y una reducción del absentismo laboral debido a bajas o accidentes laborales.
El manipulador robotizado, de acuerdo con el invento, permite el manejo de cargas tanto en fabricación como en montaje de cualquier sector que maneje este tipo de productos (ya sea suspendido de grúas o montados sobre rodaduras que permitirán volteos, alineamientos, cargas, etc de piezas con cualesquiera formas y con la precisión necesaria para cada manejo) . Se caracteriza porque, dispuesto en un soporte en posición de recogida y suspendido de una grúa o puente-grúa en posición operativa, consta de, al menos:
a) una columna, integrada por una pluralidad de porciones en disposición telescópica; b) un brazo, articulado a la última de dichas porciones telescópicas y portador de la correspondiente garra, horquilla o elemento acoplado en su punta; c) un carro, que acoplado con rodadura sobre los perfiles estructurales de la grúa o puente-grúa, permite rodar con precisión en los movimientos transversal, longitudinal y de elevación; d) un anclaje, que relaciona entre sí la columna y el carro mediante un sistema de amarre rápido entre ellos; y
e) un sistema de enganche rápido que, dispuesto relacionando entre sí el gancho que pende del carro y la última de las porciones telescópicas de la columna, permite el libre giro entre el manipulador y la grúa o puente-grúa mientras está enganchado.
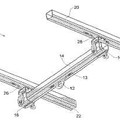
También se caracteriza porque, dicho carro comporta, al menos, cuatro guías dispuestas por parejas: dos superiores y dos inferiores que apoyan antagónica y continuamente en los perfiles estructurales de la grúa o puente-grúa, asegurando una precisión sin holguras durante sus desplazamientos rodados.
También se caracteriza porque el citado anclaje se estructura en sendas plataformas, respectivamente asociadas a la columna y al carro (con los que se desplazan) ; yendo provistas estas plataformas del citado sistema de amarre rápido entre ellas.
Aplicaciones preferentes (que no limitativas) del manipulador de acuerdo con el invento son, entre otras:
-Carga/descarga sobre máquina/herramienta;
-Manipulación de calderería en posicionado, soldadura y similares;
-Manipulación en montaje/ensamblaje de maquinaria;
-Manipulación de paletas y contenedores en estanterías, perfiles y barras largas en cantiléver;
-Alimentación de materiales a centros de trabajo;
-Carga/descarga de camiones, carros, cadenas y similares;
- Fundiciones, coladas de llenado de moldes, manejo de moldes, cargas de hornos, rebarbado y similares;
-Cambio de troqueles, útiles y similares.
En ambientes tóxicos o peligros, incluso se puede trabajar con control remoto, fuera de la nave.
Para comprender mejor el objeto de la presente invención, se representa en los planos una forma preferente de realización práctica, susceptible de cambios accesorios que no desvirtúen su fundamento.
La figura 1 es una vista general esquemática de una realización práctica del manipulador objeto del invento, con el brazo (2) estructurado en una pluralidad de 15 porciones-monopieza (21a) .
La figura 2 es una vista general esquemática de una realización práctica alternativa, del manipulador objeto del invento, con el brazo (2) estructurado en una pluralidad de porciones-pantógrafo (21 b) .
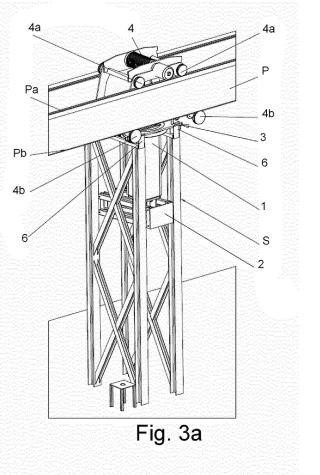
Las figura 3a y 3b representan, en dos fases, el manipulador objeto del invento dispuesto en un soporte (8) -posición de recogida, figura 3a-y dispuesto lejos del soporte (8) -posición operativa, figura 3b-.
La figura 4 representa, en detalle ampliado, una vista de la zona donde se ubican el sistema de enganche rápido (5) y el sistema de amarre rápido (6) , con el sistema de enganche rápido (5) en fase de introducción del bulón de acople.
La figura 5 representa, en detalle ampliado, una vista de la zona donde se ubican el sistema de enganche rápido (5) y el sistema de amarre rápido (6) , con el sistema de anclaje rápido (5) acoplado y con el sistema de amarre rápido (6) desacoplado.
La figura 6 representa, en detalle ampliado, una vista similar a la figura anterior, con el sistema de enganche rápido (5) acoplado y con el sistema de amarre rápido (6) también acoplado.
Se describe a continuación un ejemplo de realización práctica, no limitativa, del 5 presente invento. No se descartan en absoluto otros modos de realización en los que se introduzcan cambios accesorios que no desvirtúen su fundamento.
El objeto del invento es, en general, un sistema para manipulación de cargas y, más concretamente, un manipulador robotizado para movimiento de cargas, que puede disponerse en un soporte (S) en posición de recogida o suspendido de una grúa o puente-grúa (P) en posición operativa.
Forman parte del manipulador de cargas, de acuerdo con el invento, al menos, los siguientes componentes:
Una columna (1) integrada por una pluralidad de porciones (11) en disposición telescópica;
Un brazo (2) , articulado a la última de las porciones telescópicas de dicha columna (1) ;
Un carro (4) provisto de, al menos, cuatro guías dispuestas por parejas: dos guías superiores (4a) y dos guías inferiores (4b) ;
Un anclaje (3) , que relaciona entre sí la columna (1) y el carro (4) mediante un 20 sistema de amarre rápido (6) entre ellos;
Un sistema de enganche rápido (5) entre el gancho (G) que pende del carro (4)
y la última de las porciones telescópicas de la columna (1) y permite su libre giro mientras está enganchado.
La garra, horquilla o elemento manipulador de piezas grandes -no representada en los dibujos-se dispone articulada en el brazo (2) empleando una primera unidad de giro (G1) .
La columna (1) y el brazo (2) van articulados entre sí empleando una segunda unidad de giro (G2) .
El conjunto columna (1) /brazo (2) , que está recogido en el soporte (8) cuando no se usa, se suspende de la grúa o puente-grúa (P) empleando el gancho (G) del carro (4) y el sistema de enganche rápido (5) . Después de enganchado, se eleva hasta aproximarlo al carro (4) . Durante estas operaciones se permite el giro entre la columna (1) Y el gancho (G) a través del sistema de enganche rápido (5) de modo que se disponen las plataformas (31) , (32) del anclaje (3) en la posición correcta para que a continuación actúe el sistema de amarre rápido (6) .
Una vez ensamblados la columna (1) y el carro (4) entre ellos empleando el sistema de amarre rápido (6) el conjunto no gira: solo lo hacen las garras -no representadas-respecto al brazo (2) merced a la primera unidad de giro (G 1) Y el brazo (2) respecto a la columna (1) , merced a la segunda unidad de giro (G2) .
De conformidad con la invención, el desplazamiento telescópico entre las diversas porciones que componen la columna (1) es guiado y preciso; de modo que se elimina el movimiento pendular en dicha columna (1) .
De...
Reivindicaciones:
1. Manipulador robotizado para movimiento de cargas; caracterizado porque, dispuesto en un soporte (S) en posición de recogida y suspendido de una grúa o puente-grúa (P) en posición operativa, consta de, al menos:
a) una columna (1) integrada por una pluralidad de porciones (11) en disposición telescópica;
b) un brazo (2) articulado a la última de dichas porciones telescópicas y portador de la correspondiente garra, horquilla o elemento acoplado en su punta;
c) un carro (4) , acoplado con rodadura sobre los perfiles estructurales de la grúa o puente-grúa (P) , que comporta al menos, cuatro guías dispuestas por parejas: dos superiores (4a) y dos inferiores (4b) que apoyan antagónica y continuamente en los perfiles estructurales (Pa) , (Pb) de la grúa o puente-grúa (P) , asegurando una precisión sin holguras durante sus desplazamientos rodados;
d) un anclaje (3) , que relaciona entre sí la columna (1) y el carro (4) mediante un 15 sistema de amarre rápido (6) entre ellos y se estructura en sendas plataformas (31) ,
(32) respectivamente asociadas a la columna (1) y al carro (4) , con los que se desplazan yendo provistas estas plataformas (31) , (32) del citado sistema de amarre rápido (6) entre ellas; y
e) un sistema de enganche rápido (5) , dispuesto relacionando entre sí el gancho (G) que pende del carro (4) y la última de las porciones telescópicas de la columna (1) y constituido por un bulón de acople de estructura monopieza que define, en disposición coaxial antagónica, una anilla (51) para asirlo al gancho (G) y una cabeza (52) para engatillarlo en una cajera conjugada, que forma parte de la última porción de la columna (1) .
2. Manipulador robotizado para movimiento de cargas; según reivindicación 1, caracterizado porque dicho brazo (2) se estructura en una pluralidad de porcionesmonopieza (21a) , articuladas entre sí por sus extremos contiguos y articuladas, respectivamente, a la última de las porciones de la columna (1) y a la garra, horquilla o elemento acoplado en su punta.
3. Manipulador robotizado para movimiento de cargas; según reivindicación 1, caracterizado porque, dicho brazo (2) se estructura en una pluralidad de porcionespantógrafo (21 b) , articuladas entre sí por sus extremos contiguos y articuladas, respectivamente, a la última de las porciones de la columna (1) y a la garra, horquilla o elemento acoplado en su punta.
4. Manipulador robotizado para movimiento de cargas; según reivindicación 1, caracterizado porque el citado sistema de amarre rápido (6) está constituido por unos bulones orificados (61) que emergen de una de las plataformas (31) , (32) Y unos grupos hidráulicos (62) dispuestos en la plataforma (31) , (32) conjugada y con sus émbolos posicionalmente enfrentados a los bulones orificados (61) , en los que se acoplan/desacoplan cuando se expanden/contraen.
5. Manipulador robotizado para movimiento de cargas; según una de las reivindicaciones anteriores, caracterizado porque también dispone de un sistema automático de corrección del centro de gravedad de la carga, en orden a evitar que se produzcan grandes momentos sobre la grúa o puente grúa (P) .
p
G
G_____
G1
44a Pa p
Pb
i--___¡G2
G1
Fig.2
Fig~.3a
Pb
Fig. 3b
·Fig.4
Pa 4a 4 4a
Fig.5
Fig.6
Patentes similares o relacionadas:
Sistemas y procedimientos de alineación óptica de combustible en reactores nucleares, del 11 de Abril de 2018, de GE-HITACHI NUCLEAR ENERGY AMERICAS LLC: Un sistema para situar estructuras de manipulación con artículos para su manipulación en un entorno de reactor nuclear, comprendiendo […]
Sistema de recuperación de botellas de combustible nuclear, del 20 de Julio de 2016, de WESTINGHOUSE ELECTRIC GERMANY GMBH: Sistema de recuperación de botellas de combustible nuclear , que comprende - una plataforma de flotación flotable en el […]
 Un montaje de grúa, del 21 de Marzo de 2012, de MCKAY, DOUGLAS MCGREGOR: Un montaje de izado que comprende: una pareja de guías sustancialmente paralelas; un carro asociado con cada guía paralela y desplazable a lo largo de […]
Un montaje de grúa, del 21 de Marzo de 2012, de MCKAY, DOUGLAS MCGREGOR: Un montaje de izado que comprende: una pareja de guías sustancialmente paralelas; un carro asociado con cada guía paralela y desplazable a lo largo de […]
APARATO DE TRANSFERENCIA ROTATIVO CON UN MECANISMO DE LEVA EN LINEA., del 1 de Agosto de 2006, de RIVERWOOD INTERNATIONAL CORPORATION: Un aparato de transferencia rotativo que comprende: (a) una estructura de bastidor; (b) un eje principal soportado por dicha estructura […]
DEPOSITO DE CONTENEDORES VACIOS PARA EL ALMACENAMIENTO INTERMEDIO DE CONTENEDORES VACIOS ISO., del 1 de Agosto de 2005, de DEMAG MOBILE CRANES GMBH: Depósito de contenedores vacíos para el almacenamiento intermedio de contenedores vacíos ISO, en especial en terminales de contenedores totalmente […]
PINZA HIDRAULICA., del 16 de Agosto de 2001, de JOSE MARIA DIAZ GONZALEZ, S.A.: 1. Pinza hidráulica, caracterizada por estar constituida a partir de una pluralidad de piezas metálicas unidas entre sí, presentando una pieza alargada […]
TROCLA PESADORA., del 1 de Abril de 1997, de HIDRAT S.A.: 1. TROCLA PESADORA, ESPECIALMENTE UNA POLEA MOVIL DEL TIPO QUE COMPRENDE UN DISPOSITIVO DE PESADA, QUE INCORPORA AL MENOS UNA CELULA DE CARGA, ENTRE EL CUERPO DE […]
CARGADOR DE PAQUETES DE BARRAS DE FERRALLA, del 8 de Noviembre de 2011, de GONZALEZ LANERO, EDUARDO: Se describe un cargador de paquetes de barras de ferralla, para la descarga y/o la manipulación de tales paquetes en los lugares de utilización, los […]