Sistema de robot con raíl de soporte y plataforma de robot.
Sistema de robot (100) con las siguientes características:
a.
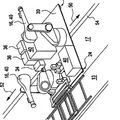
el sistema de robot (100) comprende un sistema de desplazamiento (110) con un raíl de soporte (10) a la manera de un elemento constructivo alargado orientado en una dirección de extensión principal y una plataforma de robot (120) desplazable a lo largo de la dirección de extensión principal del raíl de soporte (10) para montar un robot (130),
b. el sistema de robot (100) comprende un robot (130) montado sobre la plataforma de robot (120), caracterizado por las características siguientes:
c. el raíl de soporte (10) está configurado con por lo menos un raíl de guiado (42) metálico previsto en el lado exterior y extendido en la dirección de extensión principal para guiar la plataforma de robot (120), d. en una sección parcial que mira hacia abajo, el raíl de soporte (10) presenta por lo menos una pestaña de conexión metálica inferior (30) para fijar el raíl de soporte (10) sobre un suelo, tal como el suelo de una nave,
e. en una sección parcial que mira hacia arriba, en un lado exterior, el raíl de soporte (10) presenta por lo menos una pestaña de conexión metálica superior (40) para montar el raíl de guiado metálico y/o presenta directamente dicho por lo menos un raíl de guiado metálico (42),
f. el raíl de soporte (10) presenta una estructura de soporte (20) de hormigón, en cuyo lado exterior están montadas la pestaña de conexión metálica inferior (30) y la pestaña de conexión superior (40) o el raíl de guiado (42), y
g. la pestaña de conexión metálica superior (40), la pestaña de conexión metálica inferior (30) y/o el raíl de guiado (42) están asegurados a la estructura de soporte (20):
- por medio de unos anclajes de tracción (34, 44, 45), que encajan en arrastre de forma en la estructura de soporte de hormigón, y/o
- mediante un armazón interior (50) de conexión, que está rodeado por la estructura de soporte.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E17162660.
Solicitante: IPR-Intelligente Peripherien für Roboter GmbH.
Nacionalidad solicitante: Alemania.
Dirección: Jakob-Dieffenbacher-Strasse 4/2 75031 Eppingen ALEMANIA.
Inventor/es: KOLLMAR,THOMAS, DOLL,FREDY, STRACK,JOACHIM.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B25J5/02 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › B25J 5/00 Manipuladores montados sobre ruedas o sobre soportes móviles (B25J 1/00 tiene prioridad; manipuladores de control programado B25J 9/00). › que se desplazan sobre un camino-guía.
- E01B23/02 CONSTRUCCIONES FIJAS. › E01 CONSTRUCCION DE CARRETERAS, VIAS FERREAS O PUENTES. › E01B VIAS FERREAS; HERRAMIENTAS PARA VIAS FERREAS; MAQUINAS PARA LA CONSTRUCCION DE VIAS FERREAS DE CUALQUIER TIPO (dispositivos descarriladores o para situar los vehículos en la vía, frenos de vía o dispositivos ralentizadores B61K; retirada de materia indeseable de las vías de ferrocarril, control de la vegetación, applicación de líquidos E01H). › E01B 23/00 Vías móviles o de desmontaje fácil, p. ej. vías férreas temporales; Piezas o accesorios especialmente proyectadas a este efecto. › Vías ligeras o carriles, p. ej. para uso en los campos, minas de hulla o minas.
PDF original: ES-2769054_T3.pdf
Patentes similares o relacionadas:
Conjunto de plataforma de trabajo automatizada, del 15 de Julio de 2020, de WESTINGHOUSE ELECTRIC COMPANY LLC: Un conjunto de plataforma de trabajo automatizada para dar servicio a distancia a una porción inferior de una vasija , comprendiendo el conjunto […]
SISTEMA Y PROCEDIMIENTO PARA EL RECAMBIO DE REVESTIMIENTOS, CUYA CONFIGURACIÓN PERMITE RETIRAR E INTRODUCIR, EN FORMA AUTOMATIZADA, REVESTIMIENTOS DE UN MOLINO UTILIZADO PARA LA MOLIENDA DE MINERAL, del 2 de Julio de 2020, de MI ROBOTIC SOLUTIONS S.A: Un sistema y procedimiento para el recambio de revestimientos de un molino, cuya configuración permita la manipulación automatizada y robótica […]
Manipulador de alimentos en un almacén, del 13 de Mayo de 2020, de Imaginalis S.r.l: Un manipulador de alimentos (1a) en un almacén ; comprendiendo dicho almacén una pluralidad de estaciones de almacenamiento (1b) en las que […]
Sistema y método para separar un componente tubular, del 13 de Mayo de 2020, de FRAUNHOFER-GESELLSCHAFT ZUR FORDERUNG DER ANGEWANDTEN FORSCHUNG E.V.: Sistema para separar un componente tubular que es adecuado para construir una estructura de soporte y que puede tener una tubería longitudinal con extremos […]
Sistema de traslación, del 8 de Abril de 2020, de SW Automation GmbH: Sistema de traslación para un dispositivo de manejo que cuente al menos con un elemento de guía y al menos con un cuerpo de carro que dicho […]
Sistema para cuatro robots y personas en colaboración en un entorno de trabajo en estrechamiento, del 4 de Marzo de 2020, de THE BOEING COMPANY: Un aparato para el soporte de robots y personas en colaboración en un entorno de trabajo en estrechamiento, que comprende: una plataforma […]
Máquina herramienta para la mecanización por arranque de virutas de una pieza de trabajo así como conjunto de soporte de husillo para el empleo en una máquina herramienta de este tipo, del 6 de Noviembre de 2019, de DECKEL MAHO PFRONTEN GMBH: Conjunto de soporte de husillo para el empleo en una máquina herramienta, con: - una sección de alojamiento del brazo articulado que se puede disponer o bien […]
 SISTEMA DE PROCESAMIENTO DE UN COMPONENTE EN MOVIMIENTO Y PROCEDIMIENTO PARA POSICIONAR EL SISTEMA DE PROCESAMIENTO, del 25 de Mayo de 2010, de DAIMLER AG: Sistema de procesamiento para operar sobre un componente en movimiento mediante un robot industrial temporalmente acoplable de forma rígida a […]
SISTEMA DE PROCESAMIENTO DE UN COMPONENTE EN MOVIMIENTO Y PROCEDIMIENTO PARA POSICIONAR EL SISTEMA DE PROCESAMIENTO, del 25 de Mayo de 2010, de DAIMLER AG: Sistema de procesamiento para operar sobre un componente en movimiento mediante un robot industrial temporalmente acoplable de forma rígida a […]