Método y sistema para verificar la precisión de posicionamiento de una máquina CNC.
Método para verificar la precisión de posicionamiento de una máquina CNC (1),
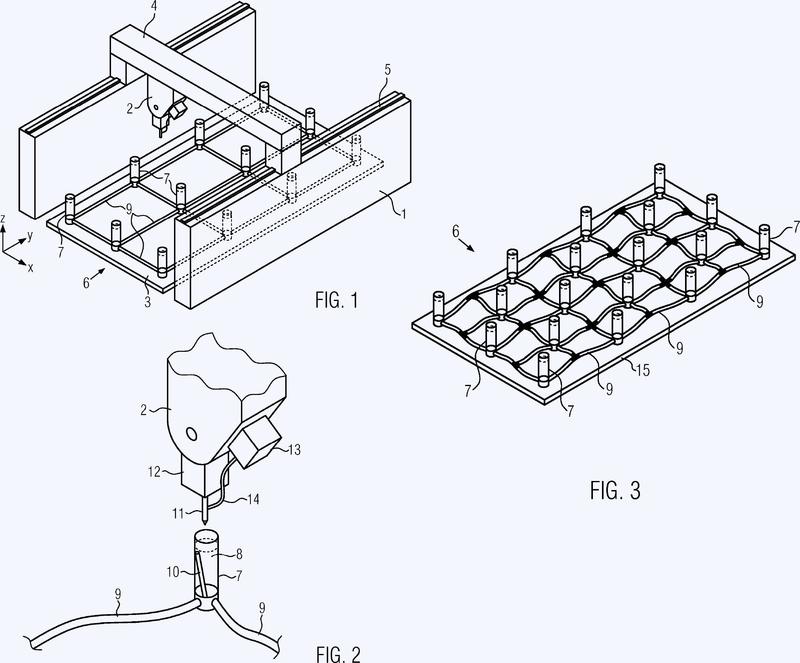
en particular, de una máquina de pórtico, con un cabezal de la máquina herramienta (2) y una mesa de máquina (3), utilizando un sistema de coordenadas x, y, z, donde la coordenada z es la coordenada perpendicular a la superficie de la mesa de la máquina, comprendiendo el método las siguientes etapas:
a) disponer una pluralidad de recipientes (7) en la mesa de la máquina, donde los recipientes están en conexión fluida entre sí para formar un sistema de recipientes de comunicación, donde el sistema de recipientes de comunicación se llena con un líquido (8),
b) montar un sensor de distancia en el cabezal de la máquina herramienta,
c) colocar el cabezal de la máquina herramienta en una posición perpendicular sobre la superficie del líquido en uno de los recipientes,
d) acercar la superficie del líquido al sensor de distancia y determinar la coordenada z en la que el sensor de distancia toca la superficie del líquido,
o,
para una coordenada z predeterminada del cabezal de la máquina herramienta, determinar la distancia entre el sensor de distancia y la superficie del líquido;
donde las etapas c) y d) se repiten para cada recipiente para determinar una coordenada z respectiva de la superficie del líquido.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E14156999.
Solicitante: FIDIA S.P.A..
Nacionalidad solicitante: Italia.
Dirección: Corso Lombardia, 11 10099 San Mauro Torinese ITALIA.
Inventor/es: MORFINO, GIUSEPPE, VESCO,MARIO.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01C5/04 FISICA. › G01 METROLOGIA; ENSAYOS. › G01C MEDIDA DE DISTANCIAS, NIVELES O RUMBOS; TOPOGRAFIA; NAVEGACION; INSTRUMENTOS GIROSCOPICOS; FOTOGRAMETRIA O VIDEOGRAMETRIA (medida del nivel de líquidos G01F; radio navegación, determinación de la distancia o velocidad mediante la utilización de efectos de propagación, p. ej. efecto Doppler, tiempo de propagación, de ondas de radio, disposiciones análogas que utilicen otras ondas G01S). › G01C 5/00 Medida de la altura; Medida de distancias transversales a la línea de vista; Nivelación entre puntos separados; Niveles topográficos (G01C 3/20, G01C 3/30 tiene prioridad). › Nivelado hidrostático, p. ej. mediante depósitos de líquido en puntos distanciados interconectados elásticamente.
- G05B19/401 G […] › G05 CONTROL; REGULACION. › G05B SISTEMAS DE CONTROL O DE REGULACION EN GENERAL; ELEMENTOS FUNCIONALES DE TALES SISTEMAS; DISPOSITIVOS DE MONITORIZACION O ENSAYOS DE TALES SISTEMAS O ELEMENTOS (dispositivos de maniobra por presión de fluido o sistemas que funcionan por medio de fluidos en general F15B; dispositivos obturadores en sí F16K; caracterizados por particularidades mecánicas solamente G05G; elementos sensibles, ver las subclases apropiadas, p. ej. G12B, las subclases de G01, H01; elementos de corrección, ver las subclases apropiadas, p. ej. H02K). › G05B 19/00 Sistemas de control por programa (aplicaciones específicas, ver los lugares apropiados, p. ej. A47L 15/46; relojes que implican medios anejos o incorporados que permiten hacer funcionar un dispositivo cualquiera en un momento elegido de antemano o después de un intervalo de tiempo predeterminado G04C 23/00; marcado o lectura de soportes de registro con una información digital G06K; registro de información G11; interruptores horarios o de programa horario que se paran automáticamente cuando el programa se ha realizado H01H 43/00). › caracterizado por disposiciones de control para la medida, p. ej. calibración e inicialización, medida de la pieza de trabajo con fines de mecanizado (G05B 19/19 tiene prioridad).
PDF original: ES-2747383_T3.pdf
Patentes similares o relacionadas:
Método para el funcionamiento de una máquina CNC, del 1 de Julio de 2020, de STEGER, HEINRICH: Método para el funcionamiento de una máquina CNC, máquina de control numérico computarizado, y para el mecanizado de una pieza de trabajo dental , donde la […]
Método y medios para controlar un robot, del 15 de Enero de 2020, de Universal Robots A/S: Un método para controlar un robot que comprende un brazo robótico, donde dicho brazo robótico comprende una sección base, una pluralidad de secciones de brazo, […]
 Dispositivo para corrección de errores para máquinas CNC, del 30 de Octubre de 2019, de FIDIA S.P.A.: Un método para determinar un error de posicionamiento de una máquina CNC, en donde la máquina CNC está equipada con un elemento de calibración , estando […]
Dispositivo para corrección de errores para máquinas CNC, del 30 de Octubre de 2019, de FIDIA S.P.A.: Un método para determinar un error de posicionamiento de una máquina CNC, en donde la máquina CNC está equipada con un elemento de calibración , estando […]
Método de evaluación de un proceso de fabricación o mecanizado en el que se realiza al menos una etapa de mecanizado en una banda de acero, del 9 de Octubre de 2019, de VDEH-BETRIEBSFORSCHUNGSINSTITUT GMBH: Método para la evaluación de un proceso de producción en el que se lleva a cabo al menos una etapa de producción en al menos un producto, en el que • un dispositivo […]
Robot de rectificado para el casco de un buque y procedimiento de rectificado del casco de un buque, del 2 de Octubre de 2019, de Freese AG: Aparato de tratamiento de superficie para el casco de un buque, que comprende: un cabezal de trabajo equipado con una unidad de aplicación, cabezal de trabajo […]
Procedimiento y dispositivo para la captación del perfil de una pieza con forma de barra o de tubo, así como máquina de mecanizado con un dispositivo de ese tipo, del 4 de Septiembre de 2019, de TRUMPF WERKZEUGMASCHINEN GMBH + CO. KG: Procedimiento para la captación de la superficie del perfil de una pieza , con forma de barra o de tubo, en el cual se orienta una instalación […]
Procedimiento y dispositivo para detectar y corregir una ubicación espacial de una pieza de trabajo sostenida en un dispositivo de posicionamiento, del 4 de Septiembre de 2019, de JENOPTIK AUTOMATISIERUNGSTECHNIK GMBH: Procedimiento para detectar y corregir una ubicación espacial de una pieza de trabajo no simétrica en rotación sostenida en un dispositivo de posicionamiento […]
MÉTODO PARA LA AUTO-VERIFICACIÓN DE SISTEMAS MECATRÓNICOS, del 25 de Julio de 2019, de FUNDACION TEKNIKER: Un método para determinar el rendimiento de error volumétrico de un sistema mecatrónico (20, 20') movible que comprende: definir una nube de puntos […]