Procedimiento para determinar una diferencia de distancia.
Un procedimiento para determinar la diferencia de distancia desde un punto de referencia a al menos dos módulos de sensor (10,
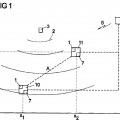
20), todos ellos situados bajo el agua, en el que los módulos de sensor (10, 20) están conectados entre sí por señales gracias a que comprenden unos medios para enviar y recibir señales acústicas, y en el que el punto de referencia comprende un hidrófono (30) para recibir señales acústicas procedentes de los módulos de sensor (10, 20), estando dicho procedimiento caracterizado porque comprende las siguientes etapas:
a) envío de una primera señal acústica desde el primer módulo de sensor (10) al segundo módulo de sensor (20);
b) envío de señales acústicas desde el segundo módulo de sensor (20) al primer módulo de sensor (10) y el hidrófono (30) de manera inmediata o tras unos retardos preestablecidos, después de que el segundo módulo de sensor (20) reciba dicha primera señal acústica enviada desde el primer módulo de sensor (10);
c) medición en el primer módulo de sensor (10) del tiempo T1 transcurrido desde que se envía la señal acústica desde el primer módulo de sensor (10) hasta que el primer módulo de sensor (10) recibe dicha señal acústica enviada desde el segundo módulo de sensor (20);
d) envío de una señal acústica, que comprende dicho tiempo T1, desde el primer módulo de sensor (10) al hidrófono (30) de manera inmediata o tras un retardo preestablecido, después de que el primer módulo de sensor (10) reciba dicha señal acústica enviada desde el segundo módulo de sensor (20);
e) medición de los tiempos de llegada de las señales acústicas recibidas en el hidrófono (30) situado en el punto de referencia; y
f) determinación de la diferencia de distancia desde el punto de referencia a cada uno de los módulos de sensor (10, 20) calculando esta diferencia en una unidad de cálculo (40) conectada al hidrófono (30) situado en el punto de referencia, basándose en las mediciones de los tiempos de llegada de las señales acústicas al hidrófono (30), y en el tiempo T1 y los retardos preestablecidos opcionales.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/NO2010/000037.
Solicitante: SKJOLD-LARSEN, HENNING.
Nacionalidad solicitante: Noruega.
Dirección: Övre Strandvei 6 3120 Tönsberg NORUEGA.
Inventor/es: SKJOLD-LARSEN, HENNING.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- A01K73/04 NECESIDADES CORRIENTES DE LA VIDA. › A01 AGRICULTURA; SILVICULTURA; CRIA; CAZA; CAPTURA; PESCA. › A01K CRÍA DE ANIMALES; AVICULTURA; APICULTURA; PISCICULTURA; PESCA; ANIMALES PARA CRIA O REPRODUCCIÓN, NO PREVISTOS EN OTRO LUGAR; NUEVAS VARIEDADES DE ANIMALES. › A01K 73/00 Redes de arrastre para pesca. › Dispositivos para el tendido o colocación en su lugar, p. ej. sus controles.
- G01S11/14 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 11/00 Sistemas para determinar la distancia o la velocidad que no utilizan la reflexión o la rerradiación (establecimiento de la posición mediante la coordinación de dos o más determinaciones de distancia G01S 5/00). › que utilizan ondas ultrasonoras, sonoras, o infrasonoras.
- G01S15/74 G01S […] › G01S 15/00 Sistemas que utilizan la reflexión o rerradiación de ondas acústicas, p. ej. sistemas de sonar. › Sistemas que utilizan la rerradiación de ondas acústicas, p. ej. identificación amigo-enemigo (IFF).
PDF original: ES-2629422_T3.pdf
Patentes similares o relacionadas:
Medición de distancia acústica para una red de arrastre, del 15 de Abril de 2020, de Scantrawl a.s: Un método para determinar la distancia entre una embarcación y al menos un módulo de sensor dispuesto en el equipo de pesca que es remolcado por la embarcación, […]
Dron Perfilador de corrientes fluviales, del 24 de Junio de 2019, de UNIVERSIDAD DE VALLADOLID: Dron perfilador de corrientes fluviales. Consiste en el desarrollo de una herramienta capaz de situar diferentes sensores en zonas de difícil acceso […]
Sistema y método de posicionamiento acústico subacuático, del 29 de Noviembre de 2017, de TrackServer, Inc: Un método para determinar la posición de un dispositivo subacuático, que comprende: proporcionar una pluralidad de dispositivos de estación […]
Procedimiento, sistema y programa informático para determinar distancias y posiciones, del 30 de Agosto de 2017, de Van Taunay, Gerald Jules Rudolf: Un procedimiento para determinar una distancia entre al menos un primer dispositivo (10, 10a, 10b, 10-1 a 10-8) de posicionamiento, FPD, y un segundo dispositivo (20, 20a, 20b, […]
 Método para la determinación de la distancia entre dispositivos acústicos bajo el agua, del 29 de Marzo de 2017, de Scantrawl a.s: Un método para la determinación de la distancia desde un punto de referencia al menos a dos módulos de sensor cuando estos están colocados aproximadamente […]
Método para la determinación de la distancia entre dispositivos acústicos bajo el agua, del 29 de Marzo de 2017, de Scantrawl a.s: Un método para la determinación de la distancia desde un punto de referencia al menos a dos módulos de sensor cuando estos están colocados aproximadamente […]
 Procedimiento y dispositivo para estimar la distancia más probable entre objetos, del 19 de Agosto de 2015, de FRAUNHOFER-GESELLSCHAFT ZUR FORDERUNG DER ANGEWANDTEN FORSCHUNG E.V.: Procedimiento para la estimación de la distancia más probable de por lo menos un objeto móvil a por lo menos otro objeto móvil , […]
Procedimiento y dispositivo para estimar la distancia más probable entre objetos, del 19 de Agosto de 2015, de FRAUNHOFER-GESELLSCHAFT ZUR FORDERUNG DER ANGEWANDTEN FORSCHUNG E.V.: Procedimiento para la estimación de la distancia más probable de por lo menos un objeto móvil a por lo menos otro objeto móvil , […]
Dispositivo para determinar una longitud de extensión de una pieza de máquina extensible, del 15 de Octubre de 2014, de MOBA - MOBILE AUTOMATION AG: Dispositivo para determinar una longitud de extensión de una pieza de máquina extensible con un primer sensor ultrasónico que comprende un primer […]
PROCEDIMIENTO PARA MARCAR UN OBJETIVO QUE EMITE SONIDO, del 2 de Diciembre de 2011, de ATLAS ELEKTRONIK GMBH: Procedimiento para marcar un objetivo que emite sonido mediante una antena submarina alongada que presenta varios transductores electroacústicos […]