Método para la determinación de la distancia entre dispositivos acústicos bajo el agua.
Un método para la determinación de la distancia desde un punto de referencia al menos a dos módulos de sensor (10,
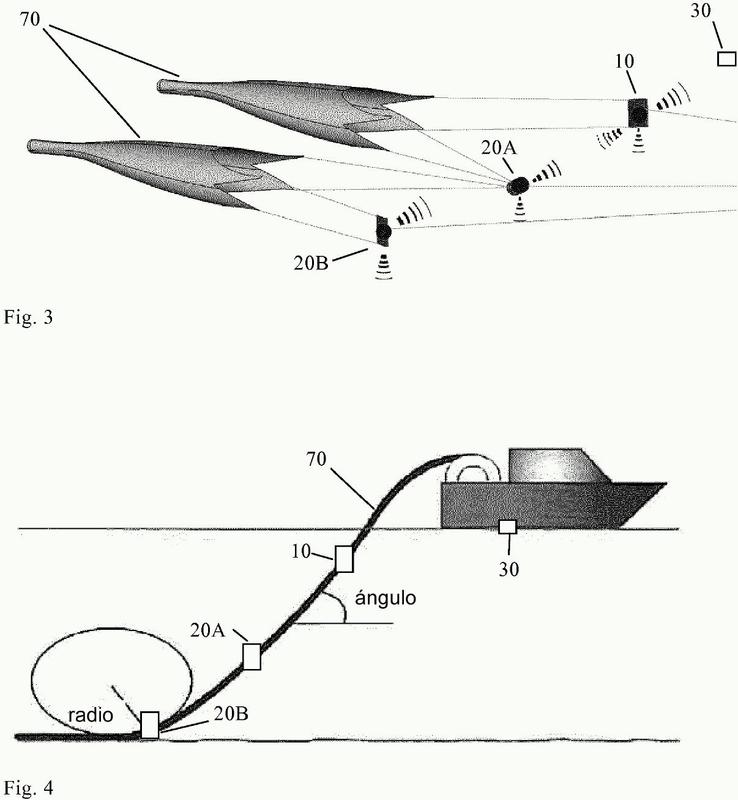
20) cuando estos están colocados aproximadamente a las mismas distancias desde el punto de referencia, todos los cuales están ubicados bajo el agua, en el que los módulos de sensor (10, 20) están en conexión entre sí cuando comprenden medios para el envío y la recepción de señales acústicas y en el que un hidrófono (30) con medios para la recepción de señales acústicas desde los módulos de sensor (10, 20) está colocado en el punto de referencia, comprendiendo el método los pasos de
a) envío de una señal acústica desde el primer módulo de sensor (10) al segundo módulo de sensor (20);
b) envío de una señal acústica desde el segundo módulo de sensor (20) al primer módulo de sensor (10) y al hidrófono (30) tanto inmediatamente como tras los retrasos establecidos después de que el segundo módulo de sensor (20) reciba la señal acústica enviada desde el primer módulo de sensor (10);
c) medición en el primer módulo de sensor (10) del tiempo T1 que tarda desde que la señal acústica se envía desde el primer módulo de sensor (10) hasta que el primer módulo de sensor (10) recibe la señal acústica enviada desde el segundo módulo de sensor (20);
d) envío de una señal acústica desde el primer módulo de sensor (10) al hidrófono (30) tanto inmediatamente como tras un retraso establecido después de que el primer módulo de sensor (10) reciba la señal acústica enviada desde el segundo módulo de sensor (20);
e) medición de los tiempos de llegada y tiempos de recorrido de las señales acústicas enviadas desde elprimer y segundo módulo de sensor (10, 20) al hidrófono (30);
f) uso de una unidad de cálculo (40) conectada al hidrófono (30) para la determinación de la diferencia en la distancia desde el punto de referencia a cada uno de los módulos de sensor (10, 20) basándose en los tiempos de llegada medidos de las señales acústicas en el hidrófono (30) y en el tiempo T1 y retrasos establecidos opcionales,
g) ajuste de la distancia y posicionamiento de los módulos de sensor (10, 20) en relación con el punto de referencia de forma que la diferencia calculada en la distancia se aproxime a cero;
h) registro a lo largo del tiempo de los valores de las señales acústicas dentro de una incertidumbre establecida para la que las diferencias calculadas en la distancia se aproximan a cero;
i) determinación de la distancia desde el punto de referencia al menos a dos módulos de sensor (10, 20) mediante el uso de los tiempos de recorrido medidos de las señales acústicas que se incluyen en dichos valores registrados.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2012/067724.
Solicitante: Scantrawl a.s.
Nacionalidad solicitante: Noruega.
Dirección: P.O. Box 44 3167 Asgårdstrand NORUEGA.
Inventor/es: SKJOLD-LARSEN, HENNING.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01S11/14 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 11/00 Sistemas para determinar la distancia o la velocidad que no utilizan la reflexión o la rerradiación (establecimiento de la posición mediante la coordinación de dos o más determinaciones de distancia G01S 5/00). › que utilizan ondas ultrasonoras, sonoras, o infrasonoras.
- G01S5/30 G01S […] › G01S 5/00 Establecimiento de la posición mediante la coordinación de dos o más determinaciones de dirección o de líneas de posición; Establecimiento de la posición mediante la coordinación de dos o más determinaciones de distancia. › Por determinación de distancias absolutas a una pluralidad de puntos espaciados de emplazamiento conocido.
- G01V1/38 G01 […] › G01V GEOFISICA; MEDIDA DE LA GRAVITACION; DETECCION DE MASAS U OBJETOS; MARCAS O ETIQUETAS DE IDENTIFICACION (medios para indicar dónde se encuentran personas sepultadas accidentalmente, p. ej. por la nieve A63B 29/02). › G01V 1/00 Sismología; Prospección o detección sísmica o acústica. › especialmente adaptado a las zonas recubiertas de agua (G01V 1/28 tiene prioridad).
PDF original: ES-2629928_T3.pdf
Patentes similares o relacionadas:
Medición de distancia acústica para una red de arrastre, del 15 de Abril de 2020, de Scantrawl a.s: Un método para determinar la distancia entre una embarcación y al menos un módulo de sensor dispuesto en el equipo de pesca que es remolcado por la embarcación, […]
Dron Perfilador de corrientes fluviales, del 24 de Junio de 2019, de UNIVERSIDAD DE VALLADOLID: Dron perfilador de corrientes fluviales. Consiste en el desarrollo de una herramienta capaz de situar diferentes sensores en zonas de difícil acceso […]
Sistema y método de posicionamiento acústico subacuático, del 29 de Noviembre de 2017, de TrackServer, Inc: Un método para determinar la posición de un dispositivo subacuático, que comprende: proporcionar una pluralidad de dispositivos de estación […]
Procedimiento, sistema y programa informático para determinar distancias y posiciones, del 30 de Agosto de 2017, de Van Taunay, Gerald Jules Rudolf: Un procedimiento para determinar una distancia entre al menos un primer dispositivo (10, 10a, 10b, 10-1 a 10-8) de posicionamiento, FPD, y un segundo dispositivo (20, 20a, 20b, […]
Procedimiento para determinar una diferencia de distancia, del 8 de Marzo de 2017, de SKJOLD-LARSEN, HENNING: Un procedimiento para determinar la diferencia de distancia desde un punto de referencia a al menos dos módulos de sensor , todos ellos situados bajo el agua, […]
 Procedimiento y dispositivo para estimar la distancia más probable entre objetos, del 19 de Agosto de 2015, de FRAUNHOFER-GESELLSCHAFT ZUR FORDERUNG DER ANGEWANDTEN FORSCHUNG E.V.: Procedimiento para la estimación de la distancia más probable de por lo menos un objeto móvil a por lo menos otro objeto móvil , […]
Procedimiento y dispositivo para estimar la distancia más probable entre objetos, del 19 de Agosto de 2015, de FRAUNHOFER-GESELLSCHAFT ZUR FORDERUNG DER ANGEWANDTEN FORSCHUNG E.V.: Procedimiento para la estimación de la distancia más probable de por lo menos un objeto móvil a por lo menos otro objeto móvil , […]
Dispositivo para determinar una longitud de extensión de una pieza de máquina extensible, del 15 de Octubre de 2014, de MOBA - MOBILE AUTOMATION AG: Dispositivo para determinar una longitud de extensión de una pieza de máquina extensible con un primer sensor ultrasónico que comprende un primer […]
PROCEDIMIENTO PARA MARCAR UN OBJETIVO QUE EMITE SONIDO, del 2 de Diciembre de 2011, de ATLAS ELEKTRONIK GMBH: Procedimiento para marcar un objetivo que emite sonido mediante una antena submarina alongada que presenta varios transductores electroacústicos […]