PROCEDIMIENTO PARA MARCAR UN OBJETIVO QUE EMITE SONIDO.
Procedimiento para marcar un objetivo que emite sonido mediante una antena submarina alongada que presenta varios transductores electroacústicos (11) en el que a partir de las señales de recepción de los transductores se determina una marcación de objetivo (ßZk) horizontal de forma selectiva en cuanto a la dirección incluyendo una valor (cmess) fijado de la velocidad de sonido en el agua medido especialmente en el lugar de la antena,
caracterizado por los siguiente paso del procedimiento: - con un modelo de propagación de sonido se calcula un recorrido de rayos de sonido en una dirección de propagación de sonido que coincide con una marcación de objetivo (ßZk) determinada, - a partir de recorrido de rayos de sonido se determina un ángulo de entrada de sonido (γk) en el lugar de antena para una distancia hacia el objetivo estimada y una profundidad hacia el objetivo estimada, - a partir del ángulo de entrada de sonido (γk) se deduce un factor de corrección, - el valor (cmess) de la velocidad de sonido fijado se corrige mediante multiplicación con un factor de corrección y - con el valor corregido de la velocidad de sonido (ceinstell) ahora se determina nuevamente un marcación de objetivo (ßZk) mejorada
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2008/002640.
G01S11/14FISICA. › G01METROLOGIA; ENSAYOS. › G01SLOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 11/00 Sistemas para determinar la distancia o la velocidad que no utilizan la reflexión o la rerradiación (establecimiento de la posición mediante la coordinación de dos o más determinaciones de distancia G01S 5/00). › que utilizan ondas ultrasonoras, sonoras, o infrasonoras.
G01S3/805G01S […] › G01S 3/00 Localizadores de dirección para la determinación de la dirección desde la que se reciben ondas infrasonoras, sonoras, ultrasonoras o electromagnéticas o emisiones de partículas, que no tienen contenido direccional significativo (establecimiento de la posición mediante la coordinación de una pluralidad de determinaciones de dirección o de líneas de posición G01S 5/00). › que utilizan el ajuste de la orientación real o efectiva de las características de directividad de un transductor o sistema transductor para proporcionar un estado deseado de la señal obtenida desde ese transductor o sistema transductor, p. ej. para proporcionar una señal máxima o mínima.
G01S3/808G01S 3/00 […] › que utilizan transductores distanciados entre sí y miden la diferencia de fase o de tiempo entre las señales que provienen de ellos, p. ej. sistemas basados en la diferencia de caminos.
G10K11/34G […] › G10INSTRUMENTOS MUSICALES; ACUSTICA. › G10K DISPOSITIVOS GENERADORES DE SONIDOS (juguetes musicales o sonoros A63H 5/00 ); METODOS O DISPOSITIVOS PARA PROTEGER CONTRA, O PARA AMORTIGUAR, RUIDO U OTRAS ONDAS ACUSTICAS EN GENERAL; ACUSTICA NO PREVISTA EN OTRO LUGAR. › G10K 11/00 Métodos o dispositivos para transmitir, conducir o dirigir el sonido en general; Métodos o dispositivos de protección contra el ruido u otras ondas acústicas en general, o para amortiguarlas. › por control eléctrico de sistemas de transductores, p. ej. dirigiendo un haz acústico.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
La invención se refiere a un procedimiento para marcar un objetivo que emite sonido mediante una antena submarina alongada que presenta una multitud de transductores electroacústicos según el preámbulo de la reivindicación 1. En el caso de un procedimiento para marcar conocido para la localización pasiva de un blanco u objetivo que emite sonido, es decir que genera sonido, que refleja sonido o que dispersa sonido (EP 01 308 745 B1) se aplica una antena denominada antena lineal con una multitud de transductores electroacústicos, colocados pegados unos a otros. Una antena lineal de este tipo son, por ejemplo, denominadas antenas remolcadas (towed arrays) o antenas laterales (flank arrays) dispuestas en el cuerpo del buque. La antena lineal tiende un sector de recepción dentro del cual sonido entrante que se emite del blanco o del objetivo y que se propaga en el agua se recibe por los transductores. Para determinar la dirección del sonido entrante con las señales de recepción de los transductores electroacústicos se generan un abanico del diagrama polar o beams que cubre el sector de recepción mediante un denominado generador de direcciones o generador de beam. Cada diagrama polar orientable electrónicamente en la dirección horizontal con respecto de una dirección de referencia presenta un ángulo de abertura horizontal relativamente pequeño y un ángulo de abertura más o menos grande en función del número de los transductores electroacústicos dispuestos de forma vertical, así como una dirección principal con la máxima sensibilidad de recepción. Como dirección de referencia normalmente se elige la dirección horizontal, perpendicular con respecto a la antena submarina, también denominada dirección perpendicular. Para la generación de las diferentes diagramas polares o beams se retardan las señales de recepción de los transductores, y concretamente de tal manera que sean cofásicas para el respectivo ángulo de pivotaje de la dirección principal del diagrama polar y las señales de recepción cofásicas se suman para formar los denominadas señales de grupo que forman los diagramas polares. Los tiempos de retardo para las señales de recepción de los transductores individuales se miden mediante la velocidad de sonido medida en el lugar de la antena, la posición de los transductores dentro de la antena submarina y del ángulo de giro del respectivo diagrama polar. En el caso de recepción de sonido en el abanico del diagrama polar se va a aquel diagrama polar en la que existe un máximo de recepción de sonido. Este se determina porque se detecta el máximo de nivel de las señales de grupo que forman los diagramas polares. El ángulo de pivotaje de la dirección principal del diagrama polar se emite como marcación de objetivo. La marcación de objetivo se representa de forma numérica o gráfica en el marcador. En el caso de antenas lineales de este tipo con el ángulo de pivotaje de la dirección principal del diagrama polar o con el tamaño de ángulo de marcación varía tanto el ángulo de abertura horizontal así como el ángulo de abertura vertical del diagrama polar o de los beams. En el caso de un ángulo de marcación de 0º perpendicular con respecto a la antena submarina el ángulo de abertura horizontal es el más pequeño o el ángulo de abertura vertical es el más grande. A medida que los ángulos de marcación van aumentando con respecto a la dirección de referencia hacia delante o hacia popa los ángulos de apertura vertical y horizontal de los diagramas polares se aproximan entre sí. En la Figura 1 se dibuja a modo de ejemplo la línea de contorno 3dB de un diagrama polar que marca un objetivo o de un beam que marca el objetivo de una antena lineal en el caso de tres ángulo de pivotaje distintos de su dirección principal, es decir, en el caso de tres marcaciones de objetivo o ángulos de marcación ß distintos. En la abscisa se representa el ángulo de marcación ß y en la ordenada se representa el ángulo de entrada del sonido . Mientras que el diagrama polar en la cercanía de la dirección perpendicular (ß=0º) es simétrica, se abolla la línea de contorno 3dB similar a un plátano con un blanco marcado hacia popa o hacia delante. Si el sonido viene exclusivamente desde la dirección horizontal entonces el máximo del diagrama polar siempre se encuentra en la coordinada ß exactamente en la marcación de objetivo indicada. Sin embargo, si el sonido también viene de una dirección vertical, tal como está indicado a modo de ejemplo por la recta trazada a rayos que transcurre a través de la paralela con respecto a la coordinada ß entonces el máximo del diagrama polar a lo largo de la línea indicada en la Figura 1 de forma punto y coma de la sensibilidad de recepción máxima hacia ángulos de marcación ß horizontales mayores, lo que lleva a una desviación de la marcación verdadera, es decir, de forma general se marca un ángulo de marcación ß demasiado grande. El error de marcación generado en este caso está simbolizado en la Figura 1 mediante la flecha doble sobre la coordinada ß. A medida que la marcación va aumentando de tamaño, es decir, con el ángulo de marcación creciente, aumenta la desviación. Como consecuencia de esto en el caso de todas las antenas submarinas lineales y próximas a lineales debido al ángulo de abertura 23dB grande vertical de por ejemplo 75º (±37,5º hacia arriba y hacia abajo) y en caso de una entrada vertical de sonido surgen errores de marcación sistemáticos como función del ángulo de marcación ß, tal como está representado en el diagrama de la Figura 2. En un procedimiento conocido para determinar valores de profundidad del perfil de aguas a partir de tiempos de recorrido de pulsos medidos de impulsos de emisión emitidos por los arrays de transductores y a partir de las direcciones de emisión (DE 42 07 716 A1) para evitar errores debido a la especificación de una velocidad de sonido incorrecta en el cálculo de los valores de profundidad se introduce un factor de corrección con el que se multiplica la velocidad de sonido fijada, medida en la superficie de las aguas para obtener la velocidad de sonido real en el recorrido de medida. Para ello para cada array de transductores se determinan valores de profundidad en cada caso en la dirección de la plomada vertical y para una dirección de plomada perpendicular con respecto al plano del array 2 de transductores y mediante de los valores de profundidad seleccionados para todas las demás direcciones de la plomada se determina valores de profundidad estimados de un perfil de estimación. Para al menos una de las demás direcciones de plomada el valor de profundidad estimado se compara con el valor de profundidad determinado a partir del tiempo de recorrido del impulso medido y de esto se determina el factor corrector para la velocidad de sonido fijada. La invención se basa en la tarea indicar un procedimiento para marcar un objetivo del tipo mencionado al principio que falla menos y por ello produce marcaciones más exactas. Esta tarea se resuelve según la invención por las características de la reivindicación 1. El procedimiento según la invención tiene la ventaja que los errores de marcación muy grandes que ocurren especialmente en el caso de ángulos de marcación que se distinguen de forma importante de la perpendicular en la zona denominada endfire de la antena submarina se eliminan en gran medida y con ello se obtiene marcaciones fiables, iguales en todas las direcciones de marcación de la antena submarina lineal. En el caso de profundidades de agua muy elevada en la que el modelo de propagación de sonido calcula un recorrido de rayo del sonido que no cambia en un intervalo de ángulos alrededor de la marcación de objetivo medido ya es suficiente una corrección derivada del ángulo de entrada del sonido vertical de la velocidad de sonido que entra en el retardo de tiempo de las señales de recepción para obtener una marcación muy exacta también en la zona endfire mediante el ajuste del diagrama polar. En el caso de profundidades de agua reducidas en las que habitualmente puede variar de forma sustancial el perfil del suelo del canal de agua en diferentes direcciones de marcación y con ello la propagación del sonido, se obtiene continuamente una marcación de objetivo mejorada mediante la determinación iterativa del ángulo de entrada de sonido vertical y mediante la corrección repetida de la velocidad del sonido que se aproxima hacia un valor de convergencia después de pocas iteraciones que indica la marcación minimizada en cuanto errores hacia el objetivo. Formas de realización apropiadas del procedimiento según la invención con desarrollos ventajosos y configuraciones de la invención resultan de las demás reivindicaciones. Según una forma de realización ventajosa de la invención se utiliza como factor de corrección para... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento para marcar un objetivo que emite sonido mediante una antena submarina alongada que presenta varios transductores electroacústicos (11) en el que a partir de las señales de recepción de los transductores se determina una marcación de objetivo (ßZk) horizontal de forma selectiva en cuanto a la dirección incluyendo una valor (cmess) fijado de la velocidad de sonido en el agua medido especialmente en el lugar de la antena, caracterizado por los siguiente paso del procedimiento: con un modelo de propagación de sonido se calcula un recorrido de rayos de sonido en una dirección de propagación de sonido que coincide con una marcación de objetivo (ßZk) determinada, a partir de recorrido de rayos de sonido se determina un ángulo de entrada de sonido (k) en el lugar de antena para una distancia hacia el objetivo estimada y una profundidad hacia el objetivo estimada, a partir del ángulo de entrada de sonido (k) se deduce un factor de corrección, el valor (cmess) de la velocidad de sonido fijado se corrige mediante multiplicación con un factor de corrección y con el valor corregido de la velocidad de sonido (ceinstell) ahora se determina nuevamente un marcación de objetivo (ßZk) mejorada. 2. Procedimiento según la reivindicación 1, caracterizado porque con el marcación de objetivo (ßZk) mejorada se repiten los pasos de procedimiento de forma iterativa hasta que el ángulo de entrada de sonido (k) vertical determinado en cada caso con la marcación de objetivo (ßZk) mejorada ya no cambia y solamente cambia poco, y porque la marcación de objetivo (ßZk) obtenido por último se emite como marcación (ßZ) hacia el objetivo. 3. Procedimiento según la reivindicación 1 o 2, caracterizado porque como factor de corrección se calcula el valor inverso del coseno de ángulo de entrada de sonido vertical. 4. Procedimiento según una cualquiera de las reivindicaciones 1 a 3, caracterizado porque la distancia hacia el objetivo estimada y la profundidad de objetivo estimada se determinan de marcaciones de objetivo anteriores o se determinan con otros sensores y/o procedimientos de determinación de datos del objetivo. 5. Procedimiento según una cualquiera de las reivindicaciones 1 a 4, caracterizado porque con el modelo de propagación de sonido se calculan todos los rayos de sonido que entran en un sector de recepción vertical de la antena submarina (10) y para los rayos de sonido se visualizan los ángulos de entrada verticales resultantes y amortiguaciones para cada intervalo de distancia y de profundidad, y porque para la determinación de ángulo de entrada de sonido (k) vertical se determina el ángulo de entrada de aquel rayo de sonido que experimenta la menor amortiguación partiendo del objetivo en la distancia y la profundidad estimada. 6. Procedimiento según una cualquiera de las reivindicaciones 1 a 5, caracterizado porque para la determinación de la marcación de objetivo (ßZk) de las señales de recepción de los transductores (11) se forma un abanico de diagramas polares (14) que presentan un ángulo de apertura horizontal y un ángulo de apertura vertical y una dirección principal (15) de la máxima sensibilidad de recepción girada con respecto a una línea de referencia (16) común y el ángulo de giro de la dirección principal (15) de aquel diagrama polar (14) en la que aparece un máximo de recepción de sonido se visualiza como marcación de objetivo (ßZk). 7 error de marcación 8 error de marcación 9 detec.max. Comp.
Patentes similares o relacionadas:
DISPOSITIVO PARA LA DETECCIÓN DE EMISIONES ACÚSTICAS, del 5 de Diciembre de 2011, de HOWALDTSWERKE-DEUTSCHE WERFT GMBH: Dispositivo para la detección y localización de emisiones acústicas de objetos móviles en forma de submarinos debajo del agua, en el que dos o más hidrófonos están […]
Medición de distancia acústica para una red de arrastre, del 15 de Abril de 2020, de Scantrawl a.s: Un método para determinar la distancia entre una embarcación y al menos un módulo de sensor dispuesto en el equipo de pesca que es remolcado por la embarcación, […]
Dron Perfilador de corrientes fluviales, del 24 de Junio de 2019, de UNIVERSIDAD DE VALLADOLID: Dron perfilador de corrientes fluviales.
Consiste en el desarrollo de una herramienta capaz de situar diferentes sensores en zonas de difícil acceso […]
Sistema y método de posicionamiento acústico subacuático, del 29 de Noviembre de 2017, de TrackServer, Inc: Un método para determinar la posición de un dispositivo subacuático, que comprende:
proporcionar una pluralidad de dispositivos de estación […]
Procedimiento, sistema y programa informático para determinar distancias y posiciones, del 30 de Agosto de 2017, de Van Taunay, Gerald Jules Rudolf: Un procedimiento para determinar una distancia entre al menos un primer dispositivo (10, 10a, 10b, 10-1 a 10-8) de posicionamiento, FPD, y un segundo dispositivo (20, 20a, 20b, […]
Método para la determinación de la distancia entre dispositivos acústicos bajo el agua, del 29 de Marzo de 2017, de Scantrawl a.s: Un método para la determinación de la distancia desde un punto de referencia al menos a dos módulos de sensor cuando estos están colocados aproximadamente […]
Procedimiento para determinar una diferencia de distancia, del 8 de Marzo de 2017, de SKJOLD-LARSEN, HENNING: Un procedimiento para determinar la diferencia de distancia desde un punto de referencia a al menos dos módulos de sensor , todos ellos situados bajo el agua, […]
Procedimiento y dispositivo para estimar la distancia más probable entre objetos, del 19 de Agosto de 2015, de FRAUNHOFER-GESELLSCHAFT ZUR FORDERUNG DER ANGEWANDTEN FORSCHUNG E.V.: Procedimiento para la estimación de la distancia más probable de por lo menos un objeto móvil a por lo menos otro objeto móvil , […]
Utilizamos cookies para mejorar nuestros servicios y mostrarle publicidad relevante. Si continua navegando, consideramos que acepta su uso. Puede obtener más información aquí. .
 Método para la determinación de la distancia entre dispositivos acústicos bajo el agua, del 29 de Marzo de 2017, de Scantrawl a.s: Un método para la determinación de la distancia desde un punto de referencia al menos a dos módulos de sensor cuando estos están colocados aproximadamente […]
Método para la determinación de la distancia entre dispositivos acústicos bajo el agua, del 29 de Marzo de 2017, de Scantrawl a.s: Un método para la determinación de la distancia desde un punto de referencia al menos a dos módulos de sensor cuando estos están colocados aproximadamente […]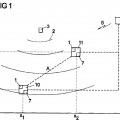 Procedimiento y dispositivo para estimar la distancia más probable entre objetos, del 19 de Agosto de 2015, de FRAUNHOFER-GESELLSCHAFT ZUR FORDERUNG DER ANGEWANDTEN FORSCHUNG E.V.: Procedimiento para la estimación de la distancia más probable de por lo menos un objeto móvil a por lo menos otro objeto móvil , […]
Procedimiento y dispositivo para estimar la distancia más probable entre objetos, del 19 de Agosto de 2015, de FRAUNHOFER-GESELLSCHAFT ZUR FORDERUNG DER ANGEWANDTEN FORSCHUNG E.V.: Procedimiento para la estimación de la distancia más probable de por lo menos un objeto móvil a por lo menos otro objeto móvil , […]