Sistema de compensación de trayectoria de vuelo para variaciones de velocidad aerodinámica.
Un método para compensar las variaciones de la velocidad aerodinámica en el control del vuelo de un avión (202),
comprendiendo el método:
identificar (604) un cambio indeseado en una velocidad aerodinámica (236) para el avión (202) utilizando una velocidad aerodinámica actual (234) para el avión (202) y una velocidad aerodinámica previa para el avión (202);
caracterizado por que
la identificación tiene en cuenta un cambio esperado (312) en la velocidad aerodinámica (236); y el método comprende además:
identificar (506) un número de órdenes (238) para un sistema (208) de control de vuelo asociado con un ala (204) del avión (202) en respuesta al cambio indeseado en la velocidad aerodinámica (236), en el que el número de órdenes (238) está configurado para hacer que el sistema (208) de control de vuelo mantenga una sustentación (222) del avión (202) durante una trayectoria deseada (224).
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E12162904.
Solicitante: THE BOEING COMPANY.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 100 NORTH RIVERSIDE PLAZA CHICAGO, IL 60606-2016 ESTADOS UNIDOS DE AMERICA.
Inventor/es: KROGH,STEVEN BARRY.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G05D1/06 FISICA. › G05 CONTROL; REGULACION. › G05D SISTEMAS DE CONTROL O DE REGULACION DE VARIABLES NO ELECTRICAS (para la colada continua de metales B22D 11/16; dispositivos obturadores en sí F16K; evaluación de variables no eléctricas, ver las subclases apropiadas de G01; para la regulación de variables eléctricas o magnéticas G05F). › G05D 1/00 Control de la posición, del rumbo, de la altitud o de la actitud de vehículos terrestres, acuáticos, aéreos o espaciales, p. ej. piloto automático (sistemas de radionavegación o sistemas análogos que utilizan otras ondas G01S). › Régimen de modificación de la altitud o de la profundidad.
PDF original: ES-2548262_T3.pdf

Fragmento de la descripción:
Sistema de compensación de trayectoria de vuelo para variaciones de velocidad aerodinámica INFORMACIÓN ANTECEDENTE
1. Campo: La presente descripción se refiere en general a aviones, y, en particular, a controlar el vuelo de un avión. Aún más particularmente, la presente descripción se refiere a un método y aparato para compensar variaciones de la velocidad aerodinámica en el control del vuelo de un avión.
2. Antecedentes: Cuando el aire circula a través de un ala de un avión, se genera una sustentación o fuerza ascendente. Esta sustentación es causada por la forma aerodinámica del ala. El flujo de aire a través del ala causa una fuerza ascendente neta que provoca la sustentación para el ala.
Cuando la velocidad aerodinámica de un avión cambia, este cambio en la velocidad aerodinámica puede afectar a la sustentación generada por el ala para el avión. Por ejemplo, un aumento de la velocidad aerodinámica da como resultado un aumento en la sustentación sobre el ala. Cuando un avión se está moviendo en una trayectoria deseada, un cambio en la velocidad aerodinámica puede cambiar la sustentación de manera que cambie la trayectoria del avión.
En algunos casos, cambiar la trayectoria del avión puede ser indeseable. Como resultado, el piloto u otro operador del avión pueden proporcionar una entrada a través de una palanca de mando del vuelo o algún otro control para mantener o devolver el avión a la trayectoria deseada. Este tipo de operación requiere una atención incrementada por el piloto para manejar el avión.
Cuando la sustentación cambia, el piloto puede ser incapaz de realizar otras operaciones al tiempo que corrige el cambio en la sustentación. Como resultado, un copiloto un otro operador ayuda al piloto a realizar estas otras operaciones.
Por ello, sería ventajoso tener un método y aparato que tenga en cuenta al menos algunos de los problemas descritos anteriormente, así como posiblemente otros problemas.
El documento US2009/0157239 describe un método para la supresión de una racha vertical debida a la turbulencia para un avión que tiene al menos una de las superficies de control de sustentación o de las superficies de control de cabeceo directo. El método incluye detectar la turbulencia atmosférica, medir la turbulencia atmosférica detectada para generar datos de turbulencia, generar una orden o comando basado en los datos de turbulencia, y aplicar la orden a los controles del avión para accionar las superficies de control de sustentación o las superficies de control de cabeceo directo basado en los datos de turbulencia. Por ello, una respuesta del avión al accionamiento de las superficies de control de sustentación o de las superficies de control de cabeceo directo reduce una aceleración vertical, una aceleración de cabeceo, una tasa de cabeceo, un ángulo de inclinación longitudinal o una carga estructural del avión debida a la turbulencia. El documento US 3.269.675 se refiere a sistemas de control de vuelo automáticos para avión, y está relacionado en particular con sistemas de control de vuelo automáticos para utilizar en el control del ángulo de inclinación longitudinal del avión. El sistema descrito en él está previsto para proporcionar una señal que varía de acuerdo con la variación de la velocidad aerodinámica del avión. Un canal de control para controlar el avión en cabeceo o inclinación longitudinal responde a dicha señal y tiende a efectuar un cambio en el ángulo de inclinación longitudinal del avión en respuesta al cambio en dicha velocidad aerodinámica, siendo tal el sentido de dicho cambio en el ángulo de inclinación longitudinal que tiende a compensar el cambio en la sustentación consecuencia del cambio en la velocidad aerodinámica por cambio en la incidencia del avión.
El documento US 2.816.724 se refiere al control de aeroplanos en elevación. Más particularmente, este documento se refiere a una disposición por medio de la cual puede impedirse que un aeroplano, equipado con flaps en las alas u otro aparato aerodinámico para alterar la sustentación del aeroplano para un ángulo de ataque dado del mismo y controlado dependiendo de su partida 20 desde un ángulo de inclinación longitudinal de referencia sólo o en combinación con su desplazamiento vertical desde un trayecto de vuelo dado, experimente transiciones de sustentación debidas a la operación de tal aparato y debidas a cambios en la velocidad aerodinámica del aeroplano acompañante 25 y/o después del tal operación.
SUMARIO En una realización ventajosa, se proporciona un método para compensar las variaciones de la velocidad aerodinámica en el control de vuelo de un avión en vuelo. Un cambio indeseado en una velocidad aerodinámica para el avión es identificado utilizando una velocidad aerodinámica actual para el avión y una velocidad aerodinámica previa para el avión caracterizado porque la identificación tiene en cuenta un cambio esperado en la velocidad aerodinámica. Varias órdenes para un sistema de control de vuelo asociado con un ala del avión son identificadas en respuesta al cambio indeseado en la velocidad aerodinámica. El número de órdenes es configurado para hacer que el sistema de control de vuelo mantenga una sustentación del avión durante una trayectoria deseada.
En otra realización ventajosa, un aparato comprende un módulo de control de sustentación. El módulo de control de sustentación está configurado para identificar un cambio indeseado utilizando la velocidad aerodinámica actual para el avión y una velocidad aerodinámica previa para el avión, caracterizado porque el módulo de control de sustentación tiene en cuenta un cambio esperado en la velocidad aerodinámica cuando identifica el cambio indeseado en una velocidad aerodinámica. El módulo de control de sustentación está configurado además para identificar varias órdenes para un sistema de control de vuelo asociado con un ala del avión. El número de órdenes está configurado para hacer que el sistema de control de vuelo mantenga una sustentación del avión durante una trayectoria dada.
También se ha descrito un módulo de control de sustentación que comprende un procesador de orden o comando de velocidad, un monitor de cambio de velocidad aerodinámica, y un proceso de compensación del cambio de sustentación. El procesador de órdenes de velocidad está configurado para identificar un cambio esperado en una velocidad aerodinámica para un avión. El monitor de cambio de velocidad aerodinámica está configurado para identificar un cambio indeseado en la velocidad aerodinámica para el avión utilizando una velocidad aerodinámica actual para el avión y una velocidad aerodinámica previa identificada para el avión. El cambio indeseado en la velocidad aerodinámica para el avión tiene en cuenta el cambio esperado en la velocidad aerodinámica para el avión. El proceso de compensación del cambio de sustentación está configurado para identificar un cambio en la sustentación para el avión que corresponde al cambio indeseado en la velocidad aerodinámica para el avión identificada por el monitor de cambio de velocidad aerodinámica.
Las características, funciones y ventajas pueden ser conseguidas de manera independiente en distintas realizaciones de la presente descripción o pueden ser combinadas aún en otras realizaciones en las que pueden verse otros detalles con referencia a la siguiente descripción y dibujos.
BREVE DESCRIPCIÓN DE LOS DIBUJOS Los nuevos rasgos que se cree son características de las realizaciones ventajosas están descritos en las reivindicaciones adjuntas. Las realizaciones ventajosas, sin embargo, así como un modo preferido de uso, otros objetivos, y ventajas del mismo, será mejor comprendidos por referencia a la siguiente descripción detallada de una realización ventajosa de la presente descripción cuando es leída en unión con los dibujos adjuntos, en los que:
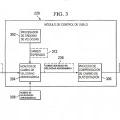
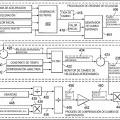
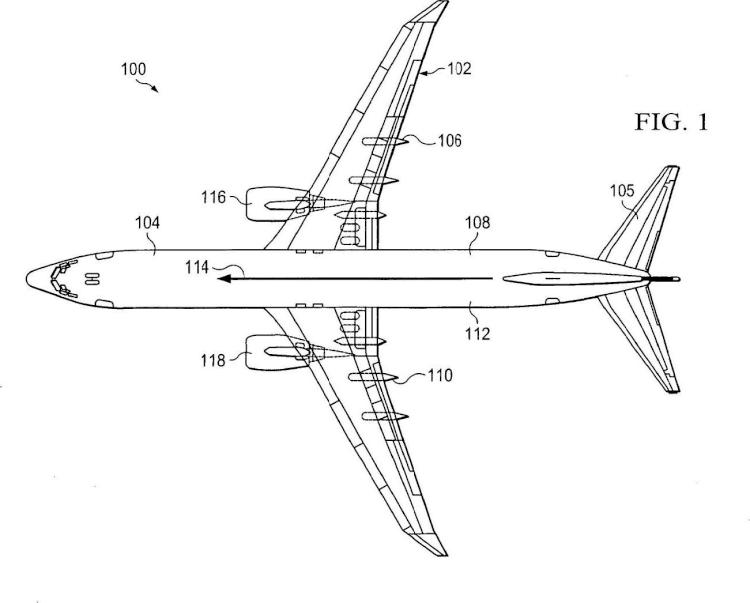
La fig. 1 es una ilustración de un avión en el que puede ser implementada una realización ventajosa; La fig. 2 es una ilustración de un diagrama de bloques de un entorno de control de vuelo de acuerdo con una realización ventajosa; La fig. 3 es una ilustración de un módulo de control de sustentación de acuerdo con una realización ventajosa; La fig. 4 es una ilustración de un módulo de control de sustentación de acuerdo con una realización ventajosa; La fig. 5 es una ilustración de un diagrama de flujo para controlar el vuelo de un avión de acuerdo con una realización ventajosa; La fig. 6 es una ilustración de un diagrama de flujo de un proceso para controlar el vuelo de un avión de acuerdo con una realización muy ventajosa; y La fig. 7 es una ilustración de un sistema de tratamiento de datos de acuerdo con una realización... [Seguir leyendo]
Reivindicaciones:
1. Un método para compensar las variaciones de la velocidad aerodinámica en el control del vuelo de un avión (202) , comprendiendo el método:
identificar (604) un cambio indeseado en una velocidad aerodinámica (236) para el avión (202) utilizando una velocidad aerodinámica actual (234) para el avión (202) y una velocidad aerodinámica previa para el avión (202) ;
caracterizado por que la identificación tiene en cuenta un cambio esperado (312) en la velocidad aerodinámica (236) ; y el método comprende además:
identificar (506) un número de órdenes (238) para un sistema (208) de control de vuelo asociado con un ala (204) del avión (202) en respuesta al cambio indeseado en la velocidad aerodinámica (236) , en el que el número de órdenes (238) está configurado para hacer que el sistema (208) de control de vuelo mantenga una sustentación (222) del avión (202) durante una trayectoria deseada (224) .
2. El método según la reivindicación 1 que comprende además:
enviar (508) el número de órdenes (238) al sistema (208) de control de vuelo.
3. El método según las reivindicaciones 1 ó 2, en el que la operación de identificar el número de órdenes (238) para el sistema (208) de control de vuelo asociado con el ala (204) del avión (202) , en el que el número de órdenes (238) está configurado para hacer que el sistema (208) de control de vuelo mantenga la sustentación (222) del avión (202) durante la trayectoria deseada (224) comprende:
identificar un cambio en la sustentación (222) causado por el cambio indeseado en la velocidad aerodinámica (236) ; e identificar el número de órdenes (238) para el sistema (208) de control de vuelo asociado con el ala (204) del avión (202) , en el que el número de órdenes (238) está configurado para hacer que el sistema (208) de control de vuelo contrarreste el cambio en la sustentación (222) del avión (202) causado por el cambio indeseado en la velocidad aerodinámica (236) .
4. El método según cualquiera de las reivindicaciones 1-3, en el que el número de órdenes (238) está configurado para hacer que el sistema (208) de control de vuelo cambie una configuración (218) para un número de superficies de control (212) .
5. El método según la reivindicación 4, en el que el cambio en la configuración (218) para el número de superficies de control (212) es un cambio simétrico con respecto a una línea central (114) que se extiende a través de un fuselaje (104) del avión (202) .
6. El método según cualquiera de las reivindicaciones 1-5, en el que el número de órdenes (238) es seleccionado a partir de al menos uno de entre un cambio en la sustentación (222) y un número de órdenes de posicionamiento para un número de superficies de control (212) en el sistema (208) de control de vuelo.
7. El método según cualquiera de las reivindicaciones 1-5, que comprende además:
identificar una velocidad aerodinámica actual (234) para el avión (202) utilizando la información (232) generada por un sistema (226) de sensores en el avión (202) .
8. Un aparato que comprende:
un módulo (220) de control de sustentación configurado para identificar un cambio indeseado en una velocidad aerodinámica (236) para un avión (202) utilizando una velocidad aerodinámica actual (234) para el avión (202) y una velocidad aerodinámica previa para el avión (202) ; caracterizado por que el módulo (220) de control de vuelo tiene en cuenta un cambio esperado (312) en la velocidad aerodinámica (236) cuando identifica el cambio indeseado en una velocidad aerodinámica (236) ; y el módulo (220) de control de sustentación está además configurado para identificar un número de órdenes (238) para un sistema (208) de control de vuelo asociado con un ala (204) del avión (202) , en el que el número de órdenes (238) está configurado para hacer que el sistema (208) de control de vuelo mantenga una sustentación (222) del avión (202) durante una trayectoria deseada (224) .
9. El aparato según la reivindicación 8, en el que el módulo (220) de control de vuelo comprende:
un monitor (304) de cambio de velocidad aerodinámica configurado para identificar el cambio indeseado en la velocidad aerodinámica (236) utilizando la velocidad aerodinámica actual (234) y la velocidad aerodinámica previa para el avión (202) ; y un proceso (306) de compensación de cambio de sustentación en comunicación con el monitor (304) de cambio de
velocidad aerodinámica y configurado para recibir el cambio indeseado en la velocidad aerodinámica (236) , identificar un cambio en la sustentación (222) en respuesta al cambio indeseado en la velocidad aerodinámica (236) , e identificar el número de órdenes (238) configurado para hacer que el sistema (208) de control de vuelo mantenga la sustentación (222) del avión (202) durante la trayectoria deseada (224) .
10. El aparato según cualquiera de las reivindicaciones 8 y 9 en el que el módulo (220) de control de vuelo comprende además:
un procesador (302) de órdenes de velocidad configurado para identificar el cambio esperado (312) en la velocidad aerodinámica (236) para el avión (202) , en el que el monitor (304) de cambio de velocidad aerodinámica está configurado para identificar el cambio indeseado en la velocidad aerodinámica (236) utilizando la velocidad aerodinámica actual (234) , la velocidad aerodinámica previa, y el cambio esperado (312) en la velocidad aerodinámica (236) para el avión (202) .
11. El aparato según cualquiera de las reivindicaciones 8-10, que comprende además:
el sistema (208) de control de vuelo en el que el sistema (208) de control de vuelo está configurado para cambiar una configuración (218) de un número de superficies de control (212) sobre el avión (202) utilizando el número de órdenes (238) para mantener la sustentación (222) del avión (202) durante la trayectoria deseada (224) .
12. El aparato según la reivindicación 11, en el que un cambio en la configuración (218) del número de superficies de control (212) es un cambio simétrico con respecto a una línea central (114) que se extiende a través de un fuselaje (104) del avión (202) .
13. El aparato según cualquiera de las reivindicaciones 8-12, en el que el número de órdenes (238) es seleccionado a partir de al menos uno de entre un cambio en la sustentación (222) y un número de órdenes de posicionamiento para un número de superficies de control (212) en el sistema (208) de control de vuelo.
Patentes similares o relacionadas:
Comunicaciones entre robots móviles de medio acuático, del 6 de Mayo de 2020, de SAUDI ARABIAN OIL COMPANY: Un sistema robótico de medio acuático, que comprende: - una estación de control ; - un robot submarino que tiene un cuerpo, una […]
Procedimiento automático de asistencia al aterrizaje de una aeronave, del 22 de Abril de 2020, de Safran Electronics & Defense: Procedimiento de asistencia al aterrizaje de una aeronave en una pista de aterrizaje desde un punto de retorno (A) hasta un punto final (D) en el que la aeronave […]
Procedimiento para la compensación del bloqueo de una pala de timón en un timón en forma de X, del 4 de Marzo de 2020, de ThyssenKrupp Marine Systems GmbH: Procedimiento para la compensación del bloqueo de una pala de timón en un timón en forma de X de un submarino, en donde el procedimiento exhibe las siguientes etapas: […]
Guía de aproximación de director de vuelo, del 6 de Noviembre de 2019, de THE BOEING COMPANY: Un método implementado por ordenador para proporcionar guiado durante una maniobra de aproximación de un avión , comprendiendo el método: determinar una […]
Método y sistema para controlar el vuelo de una aeronave sometida a al menos dos tiempos requeridos de restricciones de llegada, del 3 de Abril de 2019, de THE BOEING COMPANY: Un método para controlar el vuelo de una aeronave sometida a dos restricciones de tiempo de llegada requeridas, que comprende la etapa de: a) recibir dos tiempos […]
Sistemas y métodos para evitar que la cola de una aeronave entre en contacto con el suelo, del 8 de Enero de 2019, de THE BOEING COMPANY: Un método que comprende: determinar un perfil de descenso sobre la base de una altitud actual y una velocidad vertical actual de una aeronave […]
Procedimiento y dispositivo de calibración de sistemas de aproximación de aeropuertos mediante el uso de naves no tripuladas, del 29 de Octubre de 2018, de CANARD DRONES S.L: Procedimiento y sistema para el calibrado o ajuste de sistemas visuales de ayuda para el aterrizaje de aeronaves (VGSI) que se realiza con una aeronave capaz de realizar […]
Deflexiones de dispositivo de borde de ataque y de salida durante el descenso de una aeronave, del 25 de Septiembre de 2018, de THE BOEING COMPANY: Sistema para aumentar una velocidad de descenso de una aeronave, comprendiendo el sistema: un ordenador de control de vuelo configurado para calcular un primer […]