Sistema de dirección con geometría variable.
Sistema de dirección con geometría variable que permite un ajuste rápido y sencillo de la geometría de la dirección del vehículo,
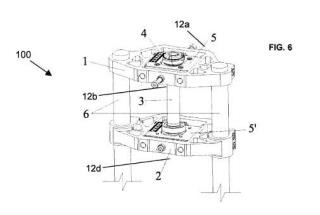
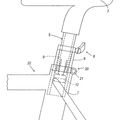
lo que permite modificar su comportamiento durante la conducción. La dirección de la invención fundamentalmente comprende: una tija superior (1) y una tija inferior (2) esencialmente paralelas; una horquilla de suspensión que comprende al menos una barra (6) conectada entre la tija superior (1) y a la tija inferior (2); y un eje de la dirección (3) conectado entre la tija superior (1) y la tija inferior (2), donde las conexiones entre las tijas superior (1) e inferior (2) y, respectivamente, la al menos una barra (6) de la horquilla de suspensión y el eje de la dirección (3), están configuradas para permitir un giro y una traslación relativos entre dicha horquilla de suspensión y dicho eje de la dirección (3).
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201400294.
Solicitante: UNIVERSIDAD DE MALAGA.
Nacionalidad solicitante: España.
Inventor/es: GARCIA VACAS,FRANCISCO, SIMON MATA,ANTONIO, ORTIZ FERNANDEZ,ANTONIO, CABRERA CARRILLO,JUAN ANTONIO, CASTILLO AGUILAR,JUAN JESUS, CARABIAS ACOSTA,ENRIQUE, GUERRA FERNANDEZ,ANTONIO JESUS, GARIJO SÁNCHEZ,Ignacio.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B62K21/22 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B62 VEHICULOS TERRESTRES QUE SE DESPLAZAN DE OTRO MODO QUE POR RAILES. › B62K CICLOS; CUADROS PARA CICLOS; DISPOSITIVOS DE DIRECCION; MANDOS ACCIONADOS POR EL CONDUCTOR ADAPTADOS ESPECIALMENTE A LOS CICLOS; SUSPENSION DE CUBOS DE RUEDAS DE CICLOS; SIDECARS, REMOLQUES DELANTEROS O VEHICULOS ADICIONALES SIMILARES PARA CICLOS. › B62K 21/00 Elementos de la dirección (elementos de la dirección adaptados especialmente a un tipo especial de ciclo especificado en los grupos B62K 1/00 - B62K 17/00, ver el grupo apropiado). › regulables.
Fragmento de la descripción:
Sistema de dirección con geometría variable OBJETO DE LA INVENCIÓN
La presente invención pertenece al sector de los vehículos de tipo fefciclo o triciclo, con preferencia en el sector de las motocicletas, ciclomotores y bicicletas.
El objeto de la presente invención es un nuevo sistema de dirección basado en un mecanismo con geometría variable que permite un ajuste rápido y sencillo de la geometría de la dirección del vehículo, lo que permite modificar su comportamiento durante la conducción. Más concretamente, el sistema de dirección de la invención permite ajustar el offset y el ángulo relativo entre la horquilla y el eje de la dirección de manera simultánea; y corregir, en parte, los efectos negativos que se producen sobre otras cotas geométricas.
ANTECEDENTES DE LA INVENCIÓN
La geometría frontal de un biciclo o triciclo, como por ejemplo una motocicleta, afecta a diversos parámetros clave para el control en curva y la estabilidad de la motocicleta en las diferentes condiciones de conducción. Se puede decir que la geometría frontal de una motocicleta comprende fundamentalmente todo aquello que hay sujeto al chasis por delante de éste, es decir: el eje de la dirección, el juego de tijas, la horquilla de suspensión y la rueda (en caso de suspensiones de tipo horquilla). A continuación se definen brevemente los parámetros más importantes implicados en la geometría frontal de una motocicleta haciendo referencia a la Figura 1, que muestra esquemáticamente una vista de perfil de una motocicleta.
Avance: el avance puede definirse como la distancia entre el punto de contacto del neumático delantero con el suelo y el punto donde la línea del eje de la dirección de la motocicleta cruza con el suelo. El avance es un parámetro determinante para el control de la maniobrabilidad y la estabilidad direccional de una motocicleta. El avance, a su vez, depende fundamentalmente de dos parámetros clave en la geometría frontal de una motocicleta como son el ángulo de lanzamiento y el offset.
Ángulo de lanzamiento: el ángulo de lanzamiento es el ángulo existente entre el eje de la dirección y la línea imaginaria perpendicular al plano del suelo, representado por q).
Ángulo de la horquilla: el ángulo de la horquilla es el ángulo existente entre la horquilla y la línea imaginaria perpendicular al plano del suelo, representado por cp. El ángulo de la horquilla y el ángulo de lanzamiento tienen habitualmente el mismo valor, ya que el eje de la dirección y la horquilla son esencialmente paralelos, por lo que el ángulo relativo entre la horquilla y el eje de dirección tiene valor nulo.
Offset: distancia mínima que existe entre las dos rectas que representan el eje de la dirección y el eje de giro de la rueda, que aquí vale D1.
La Fig. 1 también muestra otros parámetros geométricos importantes que afectan al comportamiento de la motocicleta y que por tanto deben tenerse en cuenta a la hora de configurar los reglajes: avance normal (avance_n), distancia entre ejes (D_ejes), distancia entre tijas (D3), distancias (L1, L2) y diámetros de las ruedas (Rf y Rr).
El ajuste de los reglajes en este tipo de vehículos con el objeto de modificar su comportamiento se lleva a cabo modificando estos parámetros, el offset y el ángulo de la horquilla. Sin embargo, la modificación de cada uno de estos parámetros afecta a la geometría global de la motocicleta y, como consecuencia, termina afectando a otros parámetros que ¡nicialmente no se deseaban cambiar.
En el estado de la técnica se describen diversos sistemas que permiten modificar de manera directa el offset con buenos resultados, siendo su utilización frecuente en motocicletas de altas prestaciones, sobre todo en el mundo de la competición. Para ello se usan piezas con excentricidad intercambiables, ya sea en las tijas, los rodamientos o el alojamiento del eje de dirección en el chasis, y otros métodos menos compactos (véase, por ejemplo, BRADLEY, J. "The racing motorcycle: A technical guide for constructors", Broadland Leisure Publications.1996. ISBN 0-9512929-2). Con este tipo de modificación se pueden obtener diferentes valores de avance para una misma motocicleta. Sin embargo, debido a la geometría del vehículo, cuando se modifica el offset también se modifica de manera indirecta el ángulo de lanzamiento inicialmente establecido. Adicionalmente, también se modifican otros parámetros
geométricos del vehículo, la rigidez del conjunto frontal y la respuesta dinámica frontal sin haber buscado estas consecuencias.
Esto se puede apreciar en la Fig. 2, que muestra un esquema de una motocicleta similar al de la Fig. 1 donde se ha modificado el offset con el objeto de actuar sobre el ángulo de la horquilla. El offset se aumenta en una distancia X, pero como ese aumento del offset no es paralelo al suelo sino perpendicular al eje de la dirección, como se aprecia en dicha Fig. 2, la rueda delantera después del aumento del offset quedaría separada del suelo. Al volver a apoyarla, la consecuencia sería una variación del ángulo de lanzamiento desde un valor q) hasta un valor q)+Aq)mod. En esta situación, la horquilla se mantiene paralela al eje de la dirección, por lo que su ángulo se vería también modificado desde un valor q)' hasta el valor q)+Aq)mod, en teoría buscado. Sin embargo, también se obtienen variaciones adicionales en el avance, el avance normal y la distancia entre ejes (variaciones de valor Y, Z y T respectivamente). En definitiva, la geometría final resultante no es la buscada inicialmente, y por tanto ni la respuesta dinámica ni la maniobrabilidad del vehículo final son las deseadas cuando se decidió realizar el cambio.
Estos efectos se podrían contrarrestar modificando otros parámetros geométricos. Es lo que se realiza habitualmente, especialmente cambiando las distancias L1, L2 o los diámetros de las ruedas, que son parámetros aquí considerados fijos. Estos parámetros también actúan sobre otros elementos que no se han considerado aquí pero que influyen notablemente en la respuesta dinámica y la maniobrabilidad de la motocicleta, como la posición del centro de gravedad o las suspensiones. Además, su modificación es relativamente compleja e incluso a veces está limitada (por ejemplo, en competición las ruedas suelen ser elementos con tamaño fijo).
También existen en el estado de la técnica diferentes métodos diseñados para modificar de manera directa el ángulo relativo entre la horquilla y el eje de la dirección, con el fin de actuar sobre el ángulo de la horquilla y/o el avance, y aunque están especialmente particularizados para el caso de motocicletas son potencialmente aptos para otros vehículos tipo biciclo o triciclo del mismo modo que lo es el sistema de dirección de geometría variable objeto de la presente invención.
El documento US5967538 A describe un sistema de sujeción por fricción en la tija inferior que permite la graduación y el bloqueo posterior de la geometría. Los problemas fundamentales que se observan en este sistema son la obligación de
realizar la rotación de la horquilla de suspensión respecto del eje desde la tija superior y la fijación mediante elementos a fricción que, con el paso del tiempo y el uso, pueden modificarse involuntariamente.
El documento US2011204590 A1 describe una pieza intercambiable que permite la modificación gradual del ángulo relativo entre la horquilla y el eje de la dirección según la graduación y la geometría de esta pieza. Este sistema posee dos limitaciones importantes: por un lado la imposibilidad de modificación sin desmontar el sistema de dirección y, por otro, la obligación de realizar la modificación del ángulo respecto de la tija superior.
El documento US2008100028 A1 describe un sistema que mantiene el eje de la dirección en paralelo a las barras de las horquillas de suspensión, al contrario que los sistemas anteriores. Sin embargo exige un desmontaje y montaje completo del sistema de dirección además de añadir elementos a priori innecesarios como un segundo eje y una pieza intermedia.
Sin embargo, estos sistemas dirigidos a modificar el ángulo relativo entre la horquilla y el eje de la dirección de manera directa no permiten al mismo tiempo modificar el offset de manera adicional. Sólo permiten modificar el ángulo relativo entre la horquilla y el eje de la dirección hasta un valor deseado, apareciendo como consecuencia una modificación de offset que depende de la magnitud de la modificación del ángulo de la horquilla y del resto de la geometría. Además, sólo uno de los sistemas descritos es modificable sin necesidad de desmontar por completo la parte frontal de la motocicleta. Por otro lado, en los dos primeros sistemas aparentemente...
Reivindicaciones:
1. Sistema (100) de dirección con geometría variable, que comprende:
- una tija superior (1) y una tija inferior (2) esencialmente paralelas;
- una horquilla de suspensión que comprende al menos una barra (6) conectada entre la tija superior (1) y a la tija inferior (2); y
- un eje de la dirección (3) conectado entre la tija superior (1) y la tija inferior (2), caracterizado porque
las conexiones entre las tijas superior (1) e inferior (2) y, respectivamente, la al menos una barra (6) de la horquilla de suspensión y el eje de la dirección (3), están configuradas para permitir un giro y una traslación relativos entre dicha horquilla de suspensión y dicho eje de la dirección (3).
2. Sistema (100) de dirección con geometría variable de acuerdo con la reivindicación
1, donde las conexiones entre la al menos una barra (6) de la horquilla de suspensión y las tijas superior (1) e inferior (2) son rígidas, mientras que las conexiones entre el eje de la dirección (3) y las tijas superior (1) e inferior (2) están configuradas para permitir un giro y traslación de la horquilla de suspensión con relación al eje de la dirección (3).
3. Sistema (100) de dirección con geometría variable de acuerdo con la reivindicación
2, donde:
- la conexión entre el eje de la dirección (3) y la tija inferior (2) está configurada para permitir el desplazamiento del extremo inferior del eje de la dirección (3) dentro del plano de la tija inferior (2), así como la rotación de dicho eje de la dirección (3) con relación al plano de la tija inferior (2); y
- la conexión entre el eje de la dirección (3) y la tija superior (1) está configurada para permitir el desplazamiento del extremo superior del eje de la dirección (3) y la rotación de dicho eje (3) con relación al plano de la tija superior (1), pudiendo sobresalir el extremo superior de dicho eje (3) por encima del plano de la tija superior (1)-
4. Sistema (100) de dirección con geometría variable de acuerdo con la reivindicación 3, donde:
- la conexión entre el eje de la dirección (3) y la tija inferior (2) comprende una rótula basculante fijada a una deslizadera inferior (5`) situada en el plano de dicha tija inferior (2); y
- la conexión entre el eje de la dirección (3) y la tija superior (1) comprende una rótula basculante fijada a una deslizadera superior (5) situada en el plano de dicha tija superior (1), donde la deslizadera superior (5) es desplazable a lo largo del eje de la dirección (3).
5. Sistema (100) con geometría variable de acuerdo con la reivindicación 4, donde las deslizaderas superior (5) e inferior (5') comprenden cada una un par de vástagos roscados (12a, 12b, 12c, 12d) situados respectivamente dentro de los planos de la tija superior (1) e inferior (2) para empujar las deslizaderas superior (5) e inferior (5') hacia uno u otro lado.
6. Sistema (100) de dirección con geometría variable de acuerdo con la reivindicación 5, donde los vástagos roscados (12a, 12b, 12c, 12d) son desplazables manualmente para mover las deslizaderas superior (5) e inferior (5`).
7. Sistema (100) con geometría variable de acuerdo con cualquiera de las reivindicaciones 4-6, donde las deslizaderas superior (5) e inferior (5') comprenden cada una escala graduada que permite determinar su posición respectivamente con relación a las tijas superior (1) e inferior (2).
8. Vehículo biciclo o triciclo que comprende un sistema (100) de dirección con geometría variable según cualquiera de las reivindicaciones anteriores.
9. Vehículo biciclo de acuerdo con la reivindicación 8, que es una motocicleta.
Patentes similares o relacionadas:
Dispositivo de dirección ajustable en cuanto a la altura, para vehículos pequeños, del 11 de Marzo de 2020, de Brake Force One GmbH: Dispositivo de dirección para vehículos pequeños que funcionan mediante fuerza muscular y/o de forma eléctrica, con un manillar transversal […]
Potencia de manillar extensible para bicicletas, del 9 de Octubre de 2018, de GUERRA NAVAS, Antonio Manuel: Potencia de manillar para bicicletas con regulación longitudinal en marcha, caracterizada por el hecho de que está formada por una pieza principal […]
Estructura de bastidor de soporte de rueda delantera de un vehículo de tipo montar a horcajadas, del 19 de Octubre de 2016, de HONDA MOTOR CO., LTD.: Una estructura de bastidor de soporte de rueda delantera para un vehículo de tipo montar a horcajadas, que comprende: un bastidor principal […]
 Triciclo plegable multietapa de rueda libre y dirección libre con un mecanismo de liberación de un solo movimiento, del 31 de Agosto de 2016, de GALILEO TRIKES LTD: Triciclo plegable multietapa , que comprende:
(a) un conjunto de rueda delantera ;
(b) un bastidor principal , enganchado a dicho conjunto de rueda delantera […]
Triciclo plegable multietapa de rueda libre y dirección libre con un mecanismo de liberación de un solo movimiento, del 31 de Agosto de 2016, de GALILEO TRIKES LTD: Triciclo plegable multietapa , que comprende:
(a) un conjunto de rueda delantera ;
(b) un bastidor principal , enganchado a dicho conjunto de rueda delantera […]
 POTENCIA REGULABLE PARA BICICLETAS, del 27 de Junio de 2013, de FERRAGUTCASAS BUTIÑA, Francesc: Potencia regulable para bicicletas, formada por una barra provista en un extremo con una brida de sujeción sobre un tubo-eje de la horquilla de […]
POTENCIA REGULABLE PARA BICICLETAS, del 27 de Junio de 2013, de FERRAGUTCASAS BUTIÑA, Francesc: Potencia regulable para bicicletas, formada por una barra provista en un extremo con una brida de sujeción sobre un tubo-eje de la horquilla de […]
 POTENCIA REGULABLE PARA BICICLETAS, del 6 de Mayo de 2013, de FERRAGUTCASAS BUTIÑA, Francesc: Potencia regulable para bicicletas, formada por una barra provista en un extremo con una brida de sujeción sobre un tubo-eje de la horquilla de dirección […]
POTENCIA REGULABLE PARA BICICLETAS, del 6 de Mayo de 2013, de FERRAGUTCASAS BUTIÑA, Francesc: Potencia regulable para bicicletas, formada por una barra provista en un extremo con una brida de sujeción sobre un tubo-eje de la horquilla de dirección […]
 PERFECCIONAMIENTO DE UN DISPOSITIVO CON ANGULO DE AVANCE AJUSTABLE DE UNA MOTOCICLETA, del 31 de Marzo de 2010, de LAGAR CONCEPT: Dispositivo de fijación del tren delantero sobre el bastidor de una motocicleta que incluye una platina superior , una platina inferior , un eje de columna […]
PERFECCIONAMIENTO DE UN DISPOSITIVO CON ANGULO DE AVANCE AJUSTABLE DE UNA MOTOCICLETA, del 31 de Marzo de 2010, de LAGAR CONCEPT: Dispositivo de fijación del tren delantero sobre el bastidor de una motocicleta que incluye una platina superior , una platina inferior , un eje de columna […]
 DISPOSITIVO DE REGULACION DE ALTURA PARA SILLINES O MANILLARES, del 22 de Junio de 2009, de MORELLI, ANGELO: Dispositivo de regulación de altura de sillín y manillar de bicicleta que comprende un elemento tubular dotado de medios para su conexión a dicho […]
DISPOSITIVO DE REGULACION DE ALTURA PARA SILLINES O MANILLARES, del 22 de Junio de 2009, de MORELLI, ANGELO: Dispositivo de regulación de altura de sillín y manillar de bicicleta que comprende un elemento tubular dotado de medios para su conexión a dicho […]