Guiado en cuatro dimensiones de una aeronave.
Un método de guiado de una aeronave para seguir una trayectoria de vuelo en cuatro dimensiones predeterminada durante un descenso con un ajuste de empuje nominal correspondiente a un empuje al ralentí o un empuje no al ralentí,
comprendiendo el método:
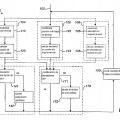
monitorizar una posición a lo largo de la derrota real y una posición vertical real de la aeronave en relación con las posiciones deseadas correspondientes en la trayectoria de vuelo predeterminada;
generar órdenes de control en base a las desviaciones de la posición vertical real de la aeronave con respecto a la posición vertical deseada; y
generar órdenes de timón de profundidad en base a la desviación de la posición a lo largo de la derrota real con respecto a la posición a lo largo de la derrota deseada;
y caracterizado por que generar órdenes de control comprende:
si la desviación de la posición vertical real con respecto a la posición vertical deseada indica que la aeronave está demasiado baja, generar una orden de aceleración para aumentar el ajuste de empuje por encima del empuje nominal; y
generar una orden de aerofreno para desplegar los aerofrenos (230) cuando la desviación de la posición vertical real con respecto a la posición vertical deseada indica que la aeronave está demasiado alta.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E10382237.
Solicitante: THE BOEING COMPANY.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 100 N. Riverside Plaza Chicago, IL 60606-1596 ESTADOS UNIDOS DE AMERICA.
Inventor/es: Garrido-Lopez,David, BURNSIDE,KEVIN, ELMER,KEVIN.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G05D1/06 FISICA. › G05 CONTROL; REGULACION. › G05D SISTEMAS DE CONTROL O DE REGULACION DE VARIABLES NO ELECTRICAS (para la colada continua de metales B22D 11/16; dispositivos obturadores en sí F16K; evaluación de variables no eléctricas, ver las subclases apropiadas de G01; para la regulación de variables eléctricas o magnéticas G05F). › G05D 1/00 Control de la posición, del rumbo, de la altitud o de la actitud de vehículos terrestres, acuáticos, aéreos o espaciales, p. ej. piloto automático (sistemas de radionavegación o sistemas análogos que utilizan otras ondas G01S). › Régimen de modificación de la altitud o de la profundidad.
PDF original: ES-2485294_T3.pdf

Fragmento de la descripción:
Guiado en cuatro dimensiones de una aeronave Campo de la invención
La presente invención se refiere a métodos de control de la trayectoria de vuelo de una aeronave para seguir tan cerca como sea posible una trayectoria de vuelo en cuatro dimensiones predeterminada. La presente invención es especialmente útil en vuelos de aproximación en descenso continuo con empuje al ralentí o con empuje no al ralentí.
Antecedentes de la invención
En general, las trayectorias de vuelo se calculan en tres dimensiones, por ejemplo, la altitud y la posición lateral. Calcular una trayectoria de vuelo en cuatro dimensiones requiere que la posición tridimensional de la aeronave se especifique a través de un número de puntos en el tiempo.
La capacidad para hacer volar una aeronave de acuerdo con una trayectoria de vuelo predeterminada con una alta precisión de manera que pueda predecirse su posición en función del tiempo se está haciendo cada vez más importante en el control del tráfico aéreo. Esto permitiría al control de tráfico aéreo flexibilizar las separaciones entre las aeronaves, conduciendo a un uso más eficiente del espacio aéreo.
Aunque es aplicable a todas las fases de vuelo de una aeronave, un área que podría beneficiarse especialmente de una capacidad mejorada para volar con una trayectoria de vuelo en cuatro dimensiones es la de las aproximaciones en descenso continuo de las aeronaves en vuelo a los aeropuertos. Normalmente, la aeronave se aproximará a un aeropuerto bajo la guía de los controladores aéreos. Los controladores aéreos tienen la tarea de garantizar la llegada segura de la aeronave a su destino, aunque también garantizar que se maximiza la capacidad del aeropuerto. En general, el primer requisito se satisface garantizando que se mantienen las separaciones mínimas especificadas entre las aeronaves. El control del tráfico aéreo está sujeto a variables que pueden actuar para reducir la separación entre las aeronaves, tales como vientos variables, tanto en velocidad como en dirección, y diferentes prácticas de pilotaje. No obstante, un gran número de aeronaves pueden funcionar con seguridad confinadas en un espacio relativamente pequeño ya que el control del tráfico aéreo puede corregir estas variables a nivel táctico usando un guiado vectorial por radar, un cambio de velocidad y/o un cambio de altitud. Como resultado, una aproximación normal a un aeropuerto implicará una aproximación escalonada en la que se permitirá a la aeronave descender por etapas a altitudes sucesivamente más bajas a medida que el resto del tráfico aéreo lo permita.
El ruido del tráfico aéreo alrededor de los aeropuertos tiene importantes consecuencias sociales, políticas y económicas para las autoridades aeroportuarias, las compañías aéreas y las comunidades. Una forma económica de hacer frente al problema del ruido en las proximidades de los aeropuertos es desarrollar nuevos procedimientos de guiado que reduzcan el número de aeronaves que vuelan sobre zonas sensibles a baja altura con ajustes de empuje altos y/o con configuraciones aerodinámicas no autorizadas (por ejemplo, sin el tren de aterrizaje y/o los flaps desplegados). Desafortunadamente, las aproximaciones escalonadas convencionales actúan para empeorar este problema ya que las aeronaves se mantienen a bajas altitudes, donde el empuje del motor debe ser suficiente para mantener el nivel de vuelo.
Las aproximaciones en descenso continuo (CDA) se conocen bien. Estas aproximaciones se entienden como la aproximación de la aeronave a un aeropuerto descendiendo de manera continua con los motores ajustados muy cerca de un empuje al ralentí o, idealmente, con un empuje al ralentí. Evidentemente, las aproximaciones en descenso continuo son muy beneficiosas en términos de reducción de ruidos ya que garantizan que las aeronaves se mantienen tan alto como sea posible por encima de las zonas sensibles mientras que, al mismo tiempo, reducen la producción de ruido en la fuente a través de un uso cuidadoso del motor y los flaps. Las aproximaciones en descenso continuo también benefician la eficiencia del combustible, la emisión de contaminantes y reducen el tiempo de vuelo.
Sin embargo, un inconveniente de las aproximaciones en descenso continuo es una reducción de la capacidad de los aeropuertos ya que la tasa de aterrizajes es menor que con las aproximaciones escalonadas convencionales. Esto se debe a que las aproximaciones en descenso continuo deben planificarse en detalle antes de comenzar la aproximación y, durante la aproximación, la aproximación no puede someterse a correcciones tácticas para garantizar una separación segura de las aeronaves similares a las usadas en las aproximaciones escalonadas convencionales. Además, volar con los motores en empuje al ralentí o cerca del empuje al ralentí significa que hay muy poco margen para reducir los ajustes de empuje para controlar la separación. Hasta la fecha, esto ha obligado a los controladores aéreos a imponer requisitos de gran espaciamiento entre las aeronaves para garantizar que la aeronave llegue al aeropuerto separada por una distancia de seguridad, teniendo en cuenta la reducción potencial en el espaciamiento de la aeronave que se aproxima en vuelo como resultado de los cambios del viento y otras variables. Este aumento de la separación produce la reducción no deseada en la capacidad del aeropuerto.
A pesar de las muchas ventajas asociadas con las aproximaciones en descenso continuo, la penalización de la capacidad ha impedido su uso generalizado en los aeropuertos. Hasta la fecha, las aproximaciones en descenso continuo se han usado en su mayoría en aeropuertos con bajos niveles de tráfico aéreo o en aeropuertos más transitados durante momentos de tranquilidad (por ejemplo, durante la noche). Por lo tanto, es deseable poder hacer vuelos en aproximación en descenso continuo que minimicen las variables en el historial de posición en cuatro dimensiones de la aeronave. Esto permitiría a los controladores aéreos reducir de manera segura el espaciamiento entre las aeronaves, satisfaciendo de este modo las necesidades de capacidad de los aeropuertos modernos.
El documento EP 2.154.594 describe un método de vuelo en aproximación usando órdenes de aceleración para corregir las desviaciones en la posición vertical y órdenes de timón de profundidad para corregir las desviaciones en la posición horizontal.
Sumario de la invención
Con estos antecedentes, y de acuerdo con un primer aspecto, la presente invención radica en un método de guiado de una aeronave para seguir una trayectoria de vuelo en cuatro dimensiones predeterminada durante un descenso con un ajuste de empuje nominal correspondiente a un empuje al ralentí o un empuje no al ralentí. El método comprende monitorizar una posición a lo largo de la derrota real y una posición vertical real de la aeronave en relación con las posiciones deseadas correspondientes en la trayectoria de vuelo predeterminada. Las órdenes de control se generan en base a las desviaciones de la posición vertical real de la aeronave con respecto a la posición vertical deseada. Las órdenes de timón de profundidad se generan en base a la desviación de la posición a lo largo de la derrota real con respecto a la posición a lo largo de la derrota deseada.
La generación de órdenes de control se implementa de dos formas diferentes, dependiendo de si la desviación de la posición vertical real con respecto a la posición vertical deseada indica que la aeronave está demasiado baja o demasiado alta. Si la aeronave está demasiado baja, se genera y se aplica una orden de aceleración que aumenta el ajuste de empuje por encima del empuje nominal.
Se genera una orden de aerofreno que se aplica para desplegar los aerofrenos cuando la aeronave está demasiado alta. Cuando el empuje nominal es un empuje al ralentí, se genera la orden de aerofreno cada vez que se determina que la aeronave está demasiado alta. Cuando se vuela con un empuje no al ralentí, no tiene que generarse una orden de aerofreno cada vez que se determina que la aeronave está demasiado alta. Por ejemplo, puede generarse tanto una orden de aerofreno como una orden de empuje, y la orden de empuje puede aplicarse para reducir el ajuste de empuje por debajo del ajuste nominal. Esta orden de empuje puede establecer el empuje al ralentí. En algunas circunstancias, la opción preferida puede ser una reducción de empuje. Por ejemplo, cuando se vuela en un empuje no al ralentí, la preferencia puede ser en primer lugar reducir el empuje a un empuje al ralentí y solo entonces desplegar los aerofrenos cuando la corrección deseada a la posición vertical no se cumplirá solo por la reducción de empuje. En este caso, puede haber algunas ocasiones en... [Seguir leyendo]
Reivindicaciones:
1. Un método de guiado de una aeronave para seguir una trayectoria de vuelo en cuatro dimensiones predeterminada durante un descenso con un ajuste de empuje nominal correspondiente a un empuje al ralentí o un empuje no al ralentí, comprendiendo el método:
monitorizar una posición a lo largo de la derrota real y una posición vertical real de la aeronave en relación con las posiciones deseadas correspondientes en la trayectoria de vuelo predeterminada;
generar órdenes de control en base a las desviaciones de la posición vertical real de la aeronave con respecto a
la posición vertical deseada; y
generar órdenes de timón de profundidad en base a la desviación de la posición a lo largo de la derrota real con respecto a la posición a lo largo de la derrota deseada; y caracterizado por que generar órdenes de control comprende:
si la desviación de la posición vertical real con respecto a la posición vertical deseada indica que la aeronave está demasiado baja, generar una orden de aceleración para aumentar el ajuste de empuje por encima del empuje nominal; y
generar una orden de aerofreno para desplegar los aerofrenos (230) cuando la desviación de la posición vertical real con respecto a la posición vertical deseada indica que la aeronave está demasiado alta.
2. Método de acuerdo con la reivindicación 1, que comprende generar una orden de aceleración para disminuir el ajuste de empuje por debajo del empuje nominal cuando la desviación de la posición vertical real con respecto a la posición vertical deseada indica que la aeronave está demasiado alta.
3. El método de la reivindicación 2 que comprende, si la desviación de la posición vertical real con respecto a la posición vertical deseada indica que la aeronave está demasiado alta, generar una orden de aceleración para disminuir el ajuste de empuje cuando se vuela con un empuje no a ralentí y generar una orden de aerofreno para desplegar los aerofrenos cuando se determina que la reducción del empuje por sí sola es insuficiente para corregir la desviación en la posición vertical.
4. El método de cualquier reivindicación anterior que comprende, si la desviación de la posición vertical real con respecto a la posición vertical deseada indica que la aeronave está demasiado alta, generar órdenes de aceleración cuando la posición vertical real difiere de la posición vertical deseada en más de un primer límite.
5. El método de cualquier reivindicación anterior que comprende, si la desviación de la posición vertical real con respecto a la posición vertical deseada indica que la aeronave está demasiado alta, generar órdenes de aerofreno cuando la posición vertical real difiere de la posición vertical deseada en más de un segundo límite.
6. El método de cualquier reivindicación anterior, que comprende generar órdenes de aceleración en base a las desviaciones de la posición vertical real de la aeronave con respecto a la posición vertical deseada cuando la posición vertical real difiere de la posición vertical deseada en más de un límite común, y generar órdenes de aerofreno en base a las desviaciones de la posición vertical real de la aeronave con respecto a la posición vertical deseada cuando la posición vertical real difiere de la posición vertical deseada en más del límite común.
7. El método de cualquier reivindicación anterior, que comprende además, después de modificar el ajuste de empuje por encima del ajuste nominal y mientras que el ajuste de empuje está en el valor más alto modificado, continuar monitorizando la posición vertical real de la aeronave en relación con la posición vertical deseada; y generar órdenes de aceleración y usar las órdenes de aceleración para devolver el ajuste de empuje al ajuste de empuje nominal una vez que la posición vertical real de la aeronave se corresponde con la posición vertical deseada.
8. El método de cualquier reivindicación anterior, que comprende además, después de desplegar los aerofrenos y mientras que los aerofrenos todavía están desplegados, continuar monitorizando la posición vertical real de la aeronave en relación con la posición vertical deseada, y generar una orden de aerofreno para retraer los aerofrenos una vez que la posición vertical real de la aeronave se corresponde con la posición vertical deseada.
9. El método de la reivindicación 2 o cualquiera de las reivindicaciones 3 a 8 cuando dependen de la reivindicación 2, que comprende además, después de modificar el ajuste de empuje y mientras que el ajuste de empuje está en el valor más bajo modificado, continuar monitorizando la posición vertical real de la aeronave en relación con las posiciones verticales deseadas correspondientes, y generar una orden de aceleración para devolver el ajuste de empuje al ajuste de empuje nominal una vez que la posición vertical real de la aeronave se corresponde con la posición vertical deseada.
10. El método de cualquier reivindicación anterior, que comprende generar órdenes de timón de profundidad en base a la desviación de la posición a lo largo de la derrota real con respecto a la posición a lo largo de la derrota deseada y a la desviación de la posición vertical real con respecto a la posición vertical deseada.
11. El método de la reivindicación 10, que comprende generar órdenes de timón de profundidad en base a combinaciones ponderadas de las desviaciones en la posición a lo largo de la derrota y la posición vertical.
12. El método de la reivindicación 10 o la reivindicación 11, que comprende además monitorizar la velocidad respecto al suelo real de la aeronave en relación con una velocidad respecto al suelo deseada, y donde generar órdenes de timón de profundidad se basa además en la desviación de la velocidad respecto al suelo real de la aeronave con respecto a la velocidad respecto al suelo deseada de la aeronave.
13. El método de la reivindicación 12, que comprende generar órdenes de timón de profundidad en base a las combinaciones ponderadas de las desviaciones en la posición a lo largo de la derrota, la posición vertical y la velocidad respecto al suelo.
14. El método de cualquier reivindicación anterior, que comprende usar un piloto automático para modificar una orden de velocidad aérea calibrada para incluir los términos basados en las desviaciones de la posición a lo largo de la derrota real con respecto a la posición a lo largo de la derrota deseada, la posición vertical real con respecto a la posición vertical deseada, y la velocidad respecto al suelo real con respecto a la velocidad respecto al suelo deseada.
15. El método de la reivindicación 14, que comprende generar una orden de timón de profundidad de velocidad aérea calibrada que incluye términos ponderados en base a las desviaciones de la posición a lo largo de la derrota real con respecto a la posición a lo largo de la derrota deseada, la posición vertical real con respecto a la posición vertical deseada, y la velocidad respecto al suelo real con respecto a la velocidad respecto al suelo deseada, y donde se da a cada término una ponderación diferente.
16. El método de cualquier reivindicación anterior, que comprende generar órdenes de control en base a las predicciones de las desviaciones de la posición vertical real de la aeronave con respecto a la posición vertical deseada.
17. El método de cualquier reivindicación anterior, que comprende generar órdenes de timón de profundidad en base a las predicciones de las desviaciones de la posición vertical real de la aeronave con respecto a la posición vertical deseada y en las predicciones de las desviaciones de la posición a lo largo de la derrota real con respecto a la posición a lo largo de la derrota deseada.
18. El método de la reivindicación 10 o cualquiera de las reivindicaciones 11 a 17 cuando dependen de la reivindicación 10, que comprende generar órdenes de timón de profundidad en base a predicciones de las desviaciones de la posición vertical real de la aeronave con respecto a la posición vertical deseada y a las predicciones de las desviaciones de la posición a lo largo de la derrota real con respecto a la posición a lo largo de la derrota deseada.
19. Un ordenador (201) de control de vuelo programado para implementar el método de cualquier reivindicación anterior.
20. Una aeronave (200) que tiene un ordenador (201) de control de vuelo de acuerdo con la reivindicación 19.
21. Un programa de ordenador que, cuando se ejecuta, implementa el método de cualquiera de las reivindicaciones 1 a 18.
Patentes similares o relacionadas:
Comunicaciones entre robots móviles de medio acuático, del 6 de Mayo de 2020, de SAUDI ARABIAN OIL COMPANY: Un sistema robótico de medio acuático, que comprende: - una estación de control ; - un robot submarino que tiene un cuerpo, una […]
Procedimiento automático de asistencia al aterrizaje de una aeronave, del 22 de Abril de 2020, de Safran Electronics & Defense: Procedimiento de asistencia al aterrizaje de una aeronave en una pista de aterrizaje desde un punto de retorno (A) hasta un punto final (D) en el que la aeronave […]
Procedimiento para la compensación del bloqueo de una pala de timón en un timón en forma de X, del 4 de Marzo de 2020, de ThyssenKrupp Marine Systems GmbH: Procedimiento para la compensación del bloqueo de una pala de timón en un timón en forma de X de un submarino, en donde el procedimiento exhibe las siguientes etapas: […]
Guía de aproximación de director de vuelo, del 6 de Noviembre de 2019, de THE BOEING COMPANY: Un método implementado por ordenador para proporcionar guiado durante una maniobra de aproximación de un avión , comprendiendo el método: determinar una […]
Método y sistema para controlar el vuelo de una aeronave sometida a al menos dos tiempos requeridos de restricciones de llegada, del 3 de Abril de 2019, de THE BOEING COMPANY: Un método para controlar el vuelo de una aeronave sometida a dos restricciones de tiempo de llegada requeridas, que comprende la etapa de: a) recibir dos tiempos […]
Sistemas y métodos para evitar que la cola de una aeronave entre en contacto con el suelo, del 8 de Enero de 2019, de THE BOEING COMPANY: Un método que comprende: determinar un perfil de descenso sobre la base de una altitud actual y una velocidad vertical actual de una aeronave […]
Procedimiento y dispositivo de calibración de sistemas de aproximación de aeropuertos mediante el uso de naves no tripuladas, del 29 de Octubre de 2018, de CANARD DRONES S.L: Procedimiento y sistema para el calibrado o ajuste de sistemas visuales de ayuda para el aterrizaje de aeronaves (VGSI) que se realiza con una aeronave capaz de realizar […]
Deflexiones de dispositivo de borde de ataque y de salida durante el descenso de una aeronave, del 25 de Septiembre de 2018, de THE BOEING COMPANY: Sistema para aumentar una velocidad de descenso de una aeronave, comprendiendo el sistema: un ordenador de control de vuelo configurado para calcular un primer […]