Calculador de velocidad de vehículo.
Un calculador de velocidad del vehículo (200) que incluye:
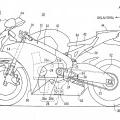
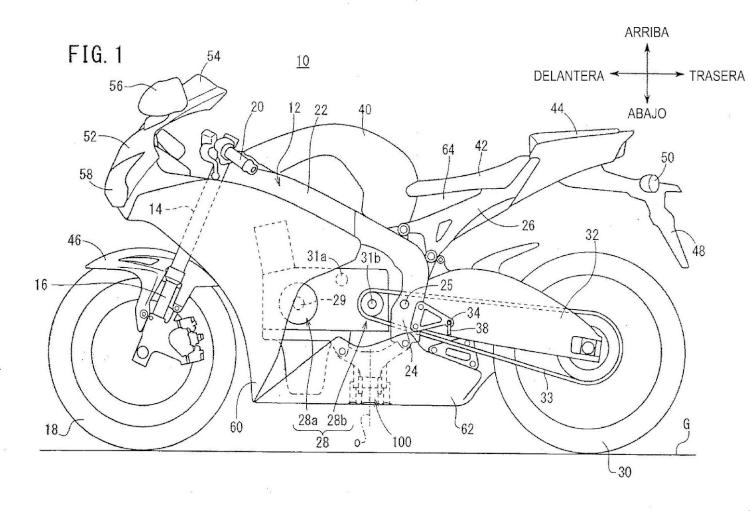
unos medios de captura de imagen (100) fijados a un vehículo (10) para capturar imágenes de una superficie de la carretera,
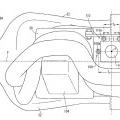
unos medios de detección de la distancia recorrida (214) adaptados para detectar una distancia recorrida (x) por unidad de tiempo de un punto característico (p) en un campo de visión capturado por los medios de captura de imagen (100) en una imagen capturada, y
unos medios de cálculo de la velocidad del vehículo (218) adaptados para calcular una velocidad de vehículo (v) del vehículo (10) con relación a la superficie de la carretera a partir de la distancia recorrida (x) detectada por los medios de detección de la distancia recorrida (214), comprendiendo el calculador de velocidad de vehículo (200):
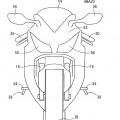
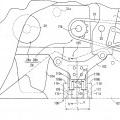
unos medios de irradiación de una marca de la distancia de referencia (108) adaptados para irradiar sobre la superficie de la carretera una marca de la distancia de referencia (109), formada de tal manera que se tenga una distancia de referencia (T1) en una dirección longitudinal del vehículo (10) en el campo de visión, en paralelo con un eje óptico (o) de los medios de captura de imagen (100), en el que los medios de irradiación de la marca de la distancia de referencia (108) están compuestos por dos punteros láser (108a, 108b) que están separados entre sí en la dirección longitudinal; y
unos medios de detección de la distancia de referencia en la imagen (216) adaptados para detectar una distancia de referencia en la imagen (Y1), la longitud a lo largo de la marca de la distancia de referencia (109) irradiada por los medios de irradiación de la marca de la distancia de referencia (108) en la imagen capturada, en el que los medios de cálculo de la velocidad del vehículo (218) calculan la velocidad del vehículo (v) a partir de la distancia recorrida (x) usando la distancia de referencia (T1) y la distancia de referencia en la imagen (Y1) detectada por los medios de detección de la distancia de referencia en la imagen (216).
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E14153100.
Solicitante: HONDA MOTOR CO., LTD..
Nacionalidad solicitante: Japón.
Dirección: 1-1, MINAMI-AOYAMA 2-CHOME, MINATO-KU TOKYO 107-8556 JAPON.
Inventor/es: ONO,TETSUYA.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B60W40/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B60 VEHICULOS EN GENERAL. › B60W CONTROL CONJUGADO DE VARIAS SUBUNIDADES DE UN VEHICULO DE DIFERENTE TIPO O FUNCION; SISTEMAS DE CONTROL ESPECIALMENTE ADAPTADOS PARA VEHICULOS HIBRIDOS; SISTEMAS DE CONTROL DE LA CONDUCCION DE VEHICULOS TERRESTRES NO RELACIONADOS CON EL CONTROL DE UNA SUBUNIDAD PARTICULAR. › Cálculo o estimación de los parámetros de funcionamiento para el sistema de ayuda a la conducción de vehículos terrestres que no están relacionados con el control de una subunidad particular.
- G01P3/80 FISICA. › G01 METROLOGIA; ENSAYOS. › G01P MEDIDA DE VELOCIDADES LINEALES O ANGULARES, DE LA ACELERACION, DECELERACION O DE CHOQUES; INDICACION DE LA PRESENCIA, AUSENCIA DE MOVIMIENTO; INDICACION DE DIRECCIÓN DE MOVIMIENTO (midiendo la velocidad angular utilizando efectos giroscópicos G01C 19/00; dispositivos de medida combinados para medir dos o más variables de un movimiento G01C 23/00; medida de la velocidad del sonido G01H 5/00; medida de la velocidad de la luz G01J 7/00; medida de la dirección o de la velocidad de objetos sólidos por reflexión o reradiación de ondas radio u otras ondas basada en los efectos de propagación, p. ej. el efecto Doppler, el tiempo de propagación, la dirección de propagación, G01S; medida de la velocidad de radiaciones nucleares G01T). › G01P 3/00 Medida de la velocidad lineal o angular; Medida de diferencias de velocidades lineales o angulares (G01P 5/00 - G01P 11/00 tienen prioridad; midiendo la velocidad angular utilizando efectos giroscópicos G01C 19/00). › utilizando medios de detección de autocorrelación o de intercorrelación.
PDF original: ES-2544129_T3.pdf
Fragmento de la descripción:
Calculador de velocidad de vehículo La presente invención se refiere a un calculador de velocidad de vehículo para el cálculo de la velocidad de un vehículo usando imágenes de una superficie de la carretera.
Es conocida una técnica para la captura de imágenes de una superficie de la carretera con una cámara fijada a un vehículo de modo que mida la velocidad de movimiento y el ángulo de la superficie de la carretera con relación a la cámara, y usarlos para obtener información sobre la velocidad y la posición del vehículo.
La Patente Japonesa Abierta a Inspección Pública Nº 2007-278951 desvela un método que incluye la proyección de una marca con forma de rejilla sobre una superficie de la carretera y la captura con una cámara de una imagen de la marca con forma de rejilla proyectada de modo que detecte la velocidad del vehículo, la posición y otra información en base al tamaño y cambio de la marca con forma de rejilla.
Sin embargo, la marca con forma de rejilla proyectada sobre la superficie de la carretera sufre un cambio, por ejemplo, en el ancho cuando cambia la altura del vehículo, haciendo probable que suceda un error en el momento de la conversión de la velocidad de movimiento de los puntos característicos obtenidos mediante un flujo óptico en velocidad del vehículo.
A la luz de lo precedente, es un objetivo de al menos las realizaciones preferidas de la presente invención proporcionar un calculador de velocidad de vehículo que ofrezca una precisión de cálculo mejorada de la velocidad del vehículo incluso en el caso de un cambio en la altura del vehículo.
De acuerdo con un primer aspecto de la presente invención, se proporciona un calculador de velocidad del vehículo que incluye: medios de captura de imagen fijados a un vehículo para capturar imágenes de una superficie de la carretera; medios de detección de la distancia recorrida adaptados para detectar una distancia recorrida por unidad de tiempo de un punto característico en un campo de visión capturado por los medios de captura de imagen en una imagen capturada, y medios de cálculo de la velocidad del vehículo adaptados para calcular una velocidad del vehículo con relación a la superficie de la carretera a partir de la distancia recorrida detectada por los medios de detección de la distancia recorrida, comprendiendo el calculador de velocidad de vehículo: unos medios de irradiación de una marca de la distancia de referencia adaptado para irradiar sobre la superficie de la carretera una marca de la distancia de referencia, formada de tal manera que se tenga una distancia de referencia en una dirección longitudinal del vehículo en el campo de visión, en paralelo con un eje óptico de los medios de imagen, en el que los medios de irradiación de la marca de la distancia de referencia están compuestos por dos punteros láser que están separados entre sí en la dirección longitudinal; y unos medios de detección de la distancia de referencia en la imagen adaptados para detectar una distancia de referencia en la imagen, la longitud a lo largo de la marca de la distancia de referencia irradiada por los medios de irradiación de la marca de la distancia de referencia en la imagen capturada, en el que los medios de cálculo de la velocidad del vehículo calculan la velocidad del vehículo a partir de la distancia recorrida usando la distancia de referencia y la distancia de referencia en la imagen detectada por los medios de detección de la distancia de referencia en la imagen.
De acuerdo con este aspecto de la presente invención, se irradia una marca de la distancia de referencia sobre una 45 superficie de la carretera en paralelo con un eje óptico de unos medios de captura de imagen para una imagen de la superficie de la carretera. La marca de referencia está formada de tal manera que tenga una distancia de referencia en una dirección longitudinal. Esto permite la proyección de la marca, un indicador de la distancia real, en la imagen capturada, haciendo posible así hallar la velocidad del vehículo con alta precisión incluso en el caso de un cambio en la altura del vehículo.
Esta disposición hace posible también configurar de modo extremadamente preciso y simple los medios de irradiación de la marca de la distancia de referencia como un medio para emitir luz en paralelo con el eje óptico de los medios de captura de imagen de tal manera que mantenga la distancia de referencia.
Preferiblemente, se proporcionan los dos punteros láser que componen los medios de irradiación de la marca de la distancia de referencia, uno en la parte delantera y otro en la trasera, con relación al eje óptico de los medios de captura de imagen.
Esta disposición asegura una facilidad en la fijación de una gran distancia de referencia, contribuyendo así a un 60 impacto reducido del error sobre el reconocimiento de imagen y proporcionando una precisión de cálculo mejorada de la velocidad del vehículo.
En una forma preferida, los dos punteros láser que componen los medios de irradiación de la marca de la distancia de referencia se disponen de tal manera que sus líneas axiales están alineadas en la dirección longitudinal.
Esta disposición hace improbable que la distancia de referencia varíe incluso durante la inclinación del vehículo, proporcionando así una precisión de cálculo mejorada de la velocidad del vehículo.
En una forma preferida adicional, los dos punteros láser que componen los medios de irradiación de la marca de la distancia de referencia se disponen de tal manera que sus líneas axiales están alineadas también con el eje óptico de los medios de captura de imagen en la dirección longitudinal.
Esta disposición hace más improbable que la distancia de referencia varíe durante la inclinación del vehículo, proporcionando así una precisión de cálculo adicionalmente mejorada de la velocidad del vehículo.
Preferiblemente, los medios de irradiación de la marca de la distancia de referencia se fijan a los medios de captura de imagen.
Esto asegura un elevado paralelismo de los ejes ópticos de los punteros láser con el eje óptico de los medios de captura de imagen, proporcionando así una precisión de cálculo mejorada de la velocidad del vehículo.
Preferiblemente, el calculador de la velocidad del vehículo comprende adicionalmente unos medios de irradiación de la segunda marca adaptado para irradiar sobre la superficie de la carretera una segunda marca, en una posición desplazada al menos en una dirección horizontal del vehículo con relación a la marca de la distancia de referencia en el campo de visión.
Esta disposición permite que el calculador de velocidad del vehículo halle un ángulo de inclinación del vehículo.
Preferiblemente, la segunda marca se forma en una posición desplazada al menos en la dirección horizontal de tal manera que tenga una distancia dada en la dirección longitudinal, y los medios de irradiación de la segunda marca irradia la segunda marca en paralelo con el eje óptico de los medios de captura de imagen.
Esta disposición permite que se halle el ángulo de inclinación del vehículo con elevada precisión.
En una forma preferida, los medios de irradiación de la segunda marca irradian la segunda marca en paralelo con el eje óptico de los medios de captura de imagen y están compuestos por dos punteros láser que se disponen separados entre sí en la dirección longitudinal.
Con esta disposición, los medios de irradiación de la segunda marca se pueden configurar de modo extremadamente preciso y simple como un medio para irradiar luz en paralelo con el eje óptico de los medios de captura de imagen de modo que mantenga la distancia dada.
En una forma preferida adicional, se proporcionan los dos punteros láser que componen los medios de irradiación de la segunda marca uno en la parte delantera y otro en la parte trasera, con relación al eje óptico de los medios de captura de imagen.
Esta disposición asegura una facilidad en la fijación de la gran distancia dada, contribuyendo así al impacto reducido del error sobre el reconocimiento de imagen y proporcionado una precisión de cálculo mejorada del ángulo de inclinación del vehículo.
Preferiblemente, los dos punteros láser que componen los medios de irradiación de la segunda marca se disponen de tal manera que sus líneas axiales están alineadas en la dirección longitudinal.
Con esta disposición, es improbable que la distancia dada varíe incluso durante la inclinación del vehículo, proporcionando así una precisión de cálculo mejorada del ángulo de inclinación del vehículo.
Preferiblemente, los medios de irradiación de la segunda marca se fijan... [Seguir leyendo]
Reivindicaciones:
1. Un calculador de velocidad del vehículo (200) que incluye:
unos medios de captura de imagen (100) fijados a un vehículo (10) para capturar imágenes de una superficie de la carretera, unos medios de detección de la distancia recorrida (214) adaptados para detectar una distancia recorrida (x) por unidad de tiempo de un punto característico (p) en un campo de visión capturado por los medios de captura de imagen (100) en una imagen capturada, y unos medios de cálculo de la velocidad del vehículo (218) adaptados para calcular una velocidad de vehículo (v) del vehículo (10) con relación a la superficie de la carretera a partir de la distancia recorrida (x) detectada por los medios de detección de la distancia recorrida (214) , comprendiendo el calculador de velocidad de vehículo (200) :
unos medios de irradiación de una marca de la distancia de referencia (108) adaptados para irradiar sobre la superficie de la carretera una marca de la distancia de referencia (109) , formada de tal manera que se tenga una distancia de referencia (T1) en una dirección longitudinal del vehículo (10) en el campo de visión, en paralelo con un eje óptico (o) de los medios de captura de imagen (100) , en el que los medios de irradiación de la marca de la distancia de referencia (108) están compuestos por dos punteros láser (108a, 108b) que están separados entre sí en la dirección longitudinal; y unos medios de detección de la distancia de referencia en la imagen (216) adaptados para detectar una distancia de referencia en la imagen (Y1) , la longitud a lo largo de la marca de la distancia de referencia (109) irradiada por los medios de irradiación de la marca de la distancia de referencia (108) en la imagen capturada, en el que los medios de cálculo de la velocidad del vehículo (218) calculan la velocidad del vehículo (v) a partir de la distancia recorrida (x) usando la distancia de referencia (T1) y la distancia de referencia en la imagen (Y1) detectada por los medios de detección de la distancia de referencia en la imagen (216) .
2. El calculador de velocidad del vehículo (200) según la reivindicación 1, en el que se proporcionan los dos punteros láser (108a, 108b) que componen los medios de irradiación de la marca de la distancia de referencia (108) , uno en la parte delantera y otro en la trasera, con relación al eje óptico (o) de los medios de captura de imagen (100) .
3. El calculador de velocidad del vehículo (200) según la reivindicación 2, en el que los dos punteros láser (108a, 108b) que componen los medios de irradiación de la marca de la distancia de referencia (108) se disponen de tal manera que sus líneas axiales están alineadas en la dirección longitudinal.
4. El calculador de velocidad del vehículo (200) según la reivindicación 3, en el que los dos punteros láser (108a, 108b) que componen los medios de irradiación de la marca de la distancia de referencia (108) se disponen de tal manera que sus líneas axiales están alineadas también con el eje óptico (o) de los medios de captura de imagen (100) en la dirección longitudinal.
5. El calculador de velocidad del vehículo (200) según una cualquiera de las reivindicaciones 1 a 4, en el que los medios de irradiación de la marca de la distancia de referencia (108) se fijan a los medios de captura de imagen (100) .
6. El calculador de velocidad del vehículo (200) según una cualquiera de las reivindicaciones 1 a 5, que comprende:
unos medios de irradiación de la segunda marca (110) adaptados para irradiar sobre la superficie de la carretera una segunda marca (111) , en una posición desplazada al menos en una dirección horizontal del vehículo (10) con relación a la marca de la distancia de referencia (109) en el campo de visión.
7. El calculador de velocidad del vehículo (200) según la reivindicación 6, en el que la segunda marca (111) se forma en una posición desplazada al menos en la dirección horizontal de tal manera que tenga una distancia dada (T2) en la dirección longitudinal, y los medios de irradiación de la segunda marca (110) irradian la segunda marca (111) en paralelo con el eje óptico
(o) de los medios de captura de imagen (100) .
8. El calculador de velocidad del vehículo (200) según la reivindicación 6 o 7, en el que los medios de irradiación de la segunda marca (110) irradian la segunda marca (111) en paralelo con el eje óptico (o) de los medios de captura de imagen (100) y están compuestos por dos punteros láser (110a, 110b) que se disponen separados entre sí en la dirección longitudinal.
9. El calculador de velocidad del vehículo (200) según la reivindicación 8, en el que se proporcionan los dos punteros láser (110a, 110b) que componen los medios de irradiación de la segunda marca (110) uno en la parte delantera y otro en la parte trasera, con relación al eje óptico (o) de los medios de captura de imagen (100) .
10. El calculador de velocidad del vehículo (200) según la reivindicación 8 o 9, en el que los dos punteros láser (110a, 110b) que componen los medios de irradiación de la segunda marca (110) se disponen de tal manera que sus líneas axiales están alineadas en la dirección longitudinal.
11. El calculador de velocidad del vehículo (200) según una cualquiera de las reivindicaciones 7 a 10, en el que los medios de irradiación de la segunda marca (110) se fijan a los medios de captura de imagen (100) .
12. El calculador de velocidad del vehículo (200) según una cualquiera de las reivindicaciones 7 a 11, en el que el vehículo (10) es una motocicleta, los medios de captura de imagen (100) se disponen al menos por debajo de un motor (28a) o de un bastidor (12) , y los medios de irradiación de la segunda marca (110) se disponen en un lateral de los medios de captura de imagen (100) , con un tubo de escape (118) en el otro lado de los medios de captura de imagen (100) .
Patentes similares o relacionadas:
 Motocicleta, del 6 de Agosto de 2014, de HONDA MOTOR CO., LTD.: Una motocicleta que incluye
un elemento (28a) motriz principal que sirve como una fuente de accionamiento de la motocicleta y que tiene un eje […]
Motocicleta, del 6 de Agosto de 2014, de HONDA MOTOR CO., LTD.: Una motocicleta que incluye
un elemento (28a) motriz principal que sirve como una fuente de accionamiento de la motocicleta y que tiene un eje […]
 Dispositivo para analizar y determinar las características de movimiento de productos, en particular en una línea de colada, y procedimiento relacionado, del 7 de Agosto de 2013, de DANIELI AUTOMATION SPA: Dispositivo para analizar y determinar las características de movimiento de productos que se mueven en unadirección determinada de alimentación (F) y que […]
Dispositivo para analizar y determinar las características de movimiento de productos, en particular en una línea de colada, y procedimiento relacionado, del 7 de Agosto de 2013, de DANIELI AUTOMATION SPA: Dispositivo para analizar y determinar las características de movimiento de productos que se mueven en unadirección determinada de alimentación (F) y que […]
 Aparato de marcado o de barrido con un dispositivo de medición para medir la velocidad de un objeto y procedimiento de medición de la velocidad de un objeto con dicho aparato de marcado o de barrido, del 4 de Junio de 2013, de ALLTEC Angewandte Laserlicht Technologie Gesellschaft mit beschränkter Haftung: Aparato de marcado y / o de barrido para el marcado y / o barrido de un objeto, que comprende:
- una cabeza de marcado y / o de barrido que presenta una pluralidad […]
Aparato de marcado o de barrido con un dispositivo de medición para medir la velocidad de un objeto y procedimiento de medición de la velocidad de un objeto con dicho aparato de marcado o de barrido, del 4 de Junio de 2013, de ALLTEC Angewandte Laserlicht Technologie Gesellschaft mit beschränkter Haftung: Aparato de marcado y / o de barrido para el marcado y / o barrido de un objeto, que comprende:
- una cabeza de marcado y / o de barrido que presenta una pluralidad […]
Sistema de estabilización para cuerpos voladores, del 14 de Marzo de 2012, de REICH, STEFAN: Procedimiento de estabilización de un vehículo con un motor propio o diseñado como un cuerpo volador que se puede controlar mecánicamente mediante un circuito de regulación […]
 SISTEMA DE MEDICION Y ESTABILIZACION PARA VEHICULOS CONTROLADOS MECANICAMENTE, del 1 de Noviembre de 2008, de CAPTRON ELECTRONIC GMBH
REICH, STEFAN: Dispositivo para la medición del movimiento y/o de la posición de un vehículo controlado mecánicamente o dotado de un dispositivo de autopropulsión […]
SISTEMA DE MEDICION Y ESTABILIZACION PARA VEHICULOS CONTROLADOS MECANICAMENTE, del 1 de Noviembre de 2008, de CAPTRON ELECTRONIC GMBH
REICH, STEFAN: Dispositivo para la medición del movimiento y/o de la posición de un vehículo controlado mecánicamente o dotado de un dispositivo de autopropulsión […]
Procedimiento para la emisión de avisos de peligro de un sistema de asistencia al conductor y sistema de asistencia al conductor correspondiente, del 25 de Octubre de 2018, de VOLKSWAGEN AKTIENGESELLSCHAFT: Procedimiento para la emisión de avisos de peligro de un sistema de asistencia al conductor en un vehículo , en el que - se registran […]
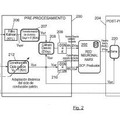 DISPOSITIVO Y MÉTODO PARA LA PREDICCIÓN "ON-LINE" DEL CICLO DE CONDUCCIÓN EN UN VEHÍCULO AUTOMÓVIL, del 5 de Julio de 2013, de SEAT, S.A.: Dispositivo y método para la predicción "on-line" del ciclo de conducción en un vehículo automóvil. El método comprende:
- una etapa de pre-procesamiento de datos :
- […]
DISPOSITIVO Y MÉTODO PARA LA PREDICCIÓN "ON-LINE" DEL CICLO DE CONDUCCIÓN EN UN VEHÍCULO AUTOMÓVIL, del 5 de Julio de 2013, de SEAT, S.A.: Dispositivo y método para la predicción "on-line" del ciclo de conducción en un vehículo automóvil. El método comprende:
- una etapa de pre-procesamiento de datos :
- […]
 MÉTODO PARA LA DETERMINACIÓN DEL RANGO DE EFICIENCIA EN LA CONDUCCIÓN DE UN VEHÍCULO AUTOMÓVIL, del 12 de Julio de 2012, de CRAMBO, S.A: Método para la determinación del rango de eficiencia en la conducción de un vehículo automóvil.
Método para la determinación de un rango de eficiencia en cuanto al consumo […]
MÉTODO PARA LA DETERMINACIÓN DEL RANGO DE EFICIENCIA EN LA CONDUCCIÓN DE UN VEHÍCULO AUTOMÓVIL, del 12 de Julio de 2012, de CRAMBO, S.A: Método para la determinación del rango de eficiencia en la conducción de un vehículo automóvil.
Método para la determinación de un rango de eficiencia en cuanto al consumo […]