Sistema de suspensión para un vehículo que incluye un actuador electromagnético.
Un sistema de suspensión para un vehículo, que comprende:
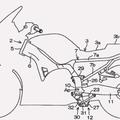
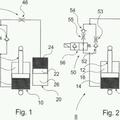
un actuador electromagnético (30) que incluye:
una unidad de lado con resorte (42, 46, 48, 60) conectada a una parte con resorte (24), una unidad de lado sin resorte (44, 62, 94) que se conecta a una parte sin resorte(22) y que es movible respecto a la unidad de lado con resorte en asociación con un movimiento de la partecon resorte y la parte sin resorte acercándose y alejándose entre sí; y un motor electromagnético, el actuadorse configura para generar, sobre la base de una fuerza del motor electromagnético (46), una fuerza deactuador que es una fuerza con respecto a un movimiento relativo de la unidad de lado con resorte y la unidad de lado sin resorte;
un mecanismo de conexión (32) que incluye un resorte de soporte (96, 100) para permitir que una de entre launidad de lado con resorte y la unidad de lado sin resorte sea soportada por una de entre la parte con resortey la parte sin resorte a la que se conecta dicha una de entre la unidad de lado con resorte y la unidad de ladosin resorte, el mecanismo de conexión se configura para conectarse a dicha una de entre la unidad de lado con resorte y la unidad de lado sin resorte y dicha una de entre la parte con resorte y la parte sin resorte; y
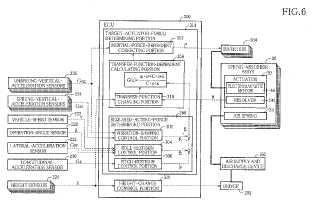
un controlador (200) que incluye una parte (314) de determinación de fuerza de objetivo de actuadorconfigurada para determinar, según una regla de control prescrita, una fuerza de objetivo de actuador que esla fuerza de actuador que se requiere que sea generada por el actuador, el controlador se configura paracontrolar la fuerza de actuador que va a ser generada por el actuador, sobre la base de la fuerza de objetivo de actuador,caracterizado porque
la parte de determinación de fuerza de objetivo de actuador se configura para determinar la fuerza de objetivode actuador sobre la base de: (a) una fuerza requerida de actuación que es una fuerza requerida para actuar entre la parte con resorte y la parte sin resorte por el actuador y el mecanismo de conexión; y (b) una fuerzainercial de dicha una de entre la unidad de lado con resorte y la unidad de lado sin resorte con respecto a undesplazamiento de dicha una de entre la parte con resorte y la parte sin resorte, utilizando al mismo tiempo:una primera función de transferencia que es una función de transferencia por la que se saca una determinadacantidad de desplazamiento de dicha una de entre la unidad de lado con resorte y la unidad de lado sin resorte con respecto a dicha una de entre la parte con resorte y la parte sin resorte cuando se aporta la
fuerza de actuador; y una segunda función de transferencia que es una función de transferencia por la que sesaca una fuerza real de actuación que es una fuerza que actúa realmente entre la parte con resorte y la partesin resorte cuando se aporta la cantidad de desplazamiento.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/JP2009/057412.
Solicitante: TOYOTA JIDOSHA KABUSHIKI KAISHA.
Nacionalidad solicitante: Japón.
Dirección: 1 Toyota-cho Toyota-shi, Aichi-ken, 471-8571 JAPON.
Inventor/es: NAKAMURA,TOMOMICHI.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B60G17/015 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B60 VEHICULOS EN GENERAL. › B60G SUSPENSION DE VEHICULOS (vehículos de colchón de aire B60V; montajes entre el chasis y el cuerpo del vehículo B62D 24/00). › B60G 17/00 Suspensiones elásticas que permiten ajustar las características de los muelles o de los amortiguadores de vibraciones, regular la distancia entre la superficie portante y la parte suspendida del vehículo o bloquear la suspensión durante la utilización para adaptarse a las condiciones variables del vehículo o del terreno, p. ej. en función de la velocidad o de la carga. › comportando los medios de reglaje elementos eléctricos o electrónicos (B60G 17/005 tienen prioridad).
- B60G17/018 B60G 17/00 […] › caracterizadas por la utilización de un modo de tratamiento de la señal o de un método de control específicos.
PDF original: ES-2415414_T3.pdf
Fragmento de la descripción:
Sistema de suspensión para un vehículo que incluye un actuador electromagnético CAMPO TÉCNICO La presente invención está relacionada con un sistema de suspensión que incluye un actuador o accionador electromagnético.
ANTECEDENTES DE LA TÉCNICA En los últimos años se ha desarrollado, como sistema de suspensión de un vehículo, el denominado sistema de suspensión electromagnética que incluye un actuador electromagnético configurado para generar, con respecto a una parte con resorte y una parte sin resorte, una fuerza en un sentido en el que la parte con resorte y la parte sin resorte se mueven acercándose y alejándose entre sí, sobre la base de una fuerza de un motor electromagnético. Por ejemplo, el siguiente documento de patente 1 describe este tipo de sistema de suspensión electromagnética. Se espera que el sistema de suspensión descrito sea como un sistema de suspensión de alto rendimiento, en vista de la ventaja de que es posible realizar fácilmente una característica de amortiguación de vibraciones basada en la llamada teoría de skyhook (amortiguador enganchado en un punto fijo en el cielo) porque el sistema de suspensión puede generar una fuerza propulsora con respecto a un movimiento relativo de la parte con resorte y la parte sin resorte.
Documento de Patente 1 JP-A-2007-203933
EXPOSICIÓN DE LA INVENCIÓN
(A) COMPENDIO DE LA INVENCIÓN En el sistema de suspensión descrito en el documento de patente 1 indicado anteriormente, se dispone un resorte en serie con el actuador electromagnético con la finalidad de hacer frente a vibraciones de alta frecuencia, por ejemplo. En el sistema construido de este modo, sin embargo, cuando el actuador genera una fuerza de actuador, la fuerza generada por actuador se transmite a la parte con resorte y la parte sin resorte a través del resorte. Por consiguiente, el sistema de suspensión sufre el problema de que la fuerza de actuador tal como es generada no puede ser transmitida debido un lapso de tiempo que surge de la transmisión de la fuerza de actuador a través del resorte, y similares. La presente invención se ha hecho en vista de la situación descrita anteriormente. Por lo tanto, un objetivo de la invención es proporcionar un sistema de suspensión en el que se hace que sea apropiada una fuerza que actúa entre la parte con resorte y la parte sin resorte por parte del actuador y un mecanismo de conexión.
Para alcanzar el objetivo indicado anteriormente, se constituye un sistema de suspensión para un vehículo según la presente invención mediante la inclusión de un mecanismo de conexión para conectar elásticamente: una de entre una unidad de lado con resorte y una unidad de lado sin resorte, que son elementos constituyentes del actuador, y una de entre una parte con resorte y una parte sin resorte a la que se conectan la unidad de lado con resorte y una unidad de lado sin resorte, y el presente sistema de suspensión se caracteriza por determinar una fuerza de objetivo de actuador sobre la base de: (a) una fuerza requerida de actuación que se requiere que actúe entre la parte con resorte y la parte sin resorte por parte del actuador y el mecanismo de conexión; y (b) una fuerza inercial de una de entre la unidad de lado con resorte y la unidad de lado sin resorte con respecto a un desplazamiento de una de entre la parte con resorte y la parte sin resorte, utilizando al mismo tiempo: una primera función de transferencia que es una función de transferencia por la que se saca una determinada cantidad de desplazamiento de una de entre la unidad de lado con resorte y la unidad de lado sin resorte con respecto a una de entre la parte con resorte y la parte sin resorte cuando se aporta la fuerza de actuador; y una segunda función de transferencia que es una función de transferencia por la que se saca una fuerza real de actuación que es una fuerza que actúa realmente entre la parte con resorte y la parte sin resorte cuando se aporta la cantidad de desplazamiento.
En el sistema de suspensión según la invención, la fuerza que va a ser generada por el actuador se determina considerando una relación entre la fuerza de actuador y la fuerza que actúa realmente entre la parte con resorte y la parte sin resorte como resultado de la transmisión de la fuerza de actuador a través del mecanismo de conexión, y considerando además la influencia del desplazamiento de una de entre la parte con resorte y la parte sin resorte a la que se conecta una de entre la unidad de lado con resorte y la unidad de lado sin resorte por el mecanismo de conexión. Por consiguiente, se puede hacer que sea apropiada la fuerza que actúa entre la parte con resorte y la parte sin resorte.
(B) FORMAS DE LA INVENCIÓN Se explicarán diversas formas de una invención que se considera que se puede reivindicar (en lo sucesivo se denomina como "invención que se puede reivindicar" donde proceda) . Cada una de las formas de la invención está numerada como las reivindicaciones adjuntas y depende de la otra forma o formas, donde proceda. Esto es para facilitar la comprensión de la invención que se puede reivindicar, y debe entenderse que las combinaciones de los elementos constitutivos que constituyen la invención no se limitan a las que se describen en las siguientes formas.
Es decir, se ha de entender que la invención que se puede reivindicar será interpretada a la luz de las siguientes descripciones de las diversas formas y realizaciones preferidas.
(1) Un sistema de suspensión para un vehículo, que comprende:
un actuador electromagnético que incluye: una unidad de lado con resorte conectada a una parte con resorte, una unidad de lado sin resorte que se conecta a una parte sin resorte y que es movible respecto a la unidad de lado con resorte en asociación con un movimiento de la parte con resorte y la parte sin resorte acercándose y alejándose entre sí; y un motor electromagnético, el actuador se configura para generar, sobre la base de una fuerza del motor electromagnético, una fuerza de actuador que es una fuerza con respecto a un movimiento relativo de la unidad de lado con resorte y la unidad de lado sin resorte; un mecanismo de conexión que incluye un resorte de soporte para permitir que una de entre la unidad de lado con resorte y la unidad de lado sin resorte sea soportada por una de entre la parte con resorte y la parte sin resorte a la que se conecta dicha una de entre la unidad de lado con resorte y la unidad de lado sin resorte, el mecanismo de conexión se configura para conectarse a dicha una de entre la unidad de lado con resorte y la unidad de lado sin resorte y dicha una de entre la parte con resorte y la parte sin resorte; y un controlador que incluye una parte de determinación de fuerza de objetivo de actuador configurada para determinar, según una regla de control prescrita, una fuerza de objetivo de actuador que es la fuerza de actuador que se requiere que sea generada por el actuador, el controlador se configura para controlar la fuerza de actuador que va a ser generada por el actuador, sobre la base de la fuerza de objetivo de actuador, en donde la parte de determinación de fuerza de objetivo de actuador se configura para determinar la fuerza de objetivo de actuador sobre la base de: (a) una fuerza de actuación requerida que es una fuerza requerida para actuar entre la parte con resorte y la parte sin resorte por el actuador y el mecanismo de conexión; y (b) una fuerza inercial de dicha una de entre la unidad de lado con resorte y la unidad de lado sin resorte con respecto a un desplazamiento de dicha una de entre la parte con resorte y la parte sin resorte, utilizando al mismo tiempo: una primera función de transferencia que es una función de transferencia por la que se saca una determinada cantidad de desplazamiento de dicha una de entre la unidad de lado con resorte y la unidad de lado sin resorte con respecto a dicha una de entre la parte con resorte y la parte sin resorte cuando se aporta la fuerza de actuador; y una segunda función de transferencia que es una función de transferencia por la que se saca una fuerza real de actuación que es una fuerza que actúa realmente entre la parte con resorte y la parte sin resorte cuando se aporta la cantidad de desplazamiento.
Como el sistema de suspensión tiene el actuador electromagnético, se ha propuesto un sistema en el que se dispone un resorte en serie con el actuador con la finalidad de hacer frente a las vibraciones de alta frecuencia generadas cuando el vehículo marcha sobre una superficie de carretera en mal estado o una superficie de carretera con continua irregularidad, por ejemplo. El sistema según la forma anterior (1) está relacionado con un sistema de este tipo. Cuando el sistema de suspensión se construye de este modo, la fuerza de actuador generada por el... [Seguir leyendo]
Reivindicaciones:
1. Un sistema de suspensión para un vehículo, que comprende:
un actuador electromagnético (30) que incluye: una unidad de lado con resorte (42, 46, 48, 60) conectada a una parte con resorte (24) , una unidad de lado sin resorte (44, 62, 94) que se conecta a una parte sin resorte (22) y que es movible respecto a la unidad de lado con resorte en asociación con un movimiento de la parte con resorte y la parte sin resorte acercándose y alejándose entre sí; y un motor electromagnético, el actuador se configura para generar, sobre la base de una fuerza del motor electromagnético (46) , una fuerza de actuador que es una fuerza con respecto a un movimiento relativo de la unidad de lado con resorte y la unidad de lado sin resorte; un mecanismo de conexión (32) que incluye un resorte de soporte (96, 100) para permitir que una de entre la unidad de lado con resorte y la unidad de lado sin resorte sea soportada por una de entre la parte con resorte y la parte sin resorte a la que se conecta dicha una de entre la unidad de lado con resorte y la unidad de lado sin resorte, el mecanismo de conexión se configura para conectarse a dicha una de entre la unidad de lado con resorte y la unidad de lado sin resorte y dicha una de entre la parte con resorte y la parte sin resorte; y un controlador (200) que incluye una parte (314) de determinación de fuerza de objetivo de actuador configurada para determinar, según una regla de control prescrita, una fuerza de objetivo de actuador que es la fuerza de actuador que se requiere que sea generada por el actuador, el controlador se configura para controlar la fuerza de actuador que va a ser generada por el actuador, sobre la base de la fuerza de objetivo de actuador,
caracterizado porque la parte de determinación de fuerza de objetivo de actuador se configura para determinar la fuerza de objetivo de actuador sobre la base de: (a) una fuerza requerida de actuación que es una fuerza requerida para actuar entre la parte con resorte y la parte sin resorte por el actuador y el mecanismo de conexión; y (b) una fuerza inercial de dicha una de entre la unidad de lado con resorte y la unidad de lado sin resorte con respecto a un desplazamiento de dicha una de entre la parte con resorte y la parte sin resorte, utilizando al mismo tiempo: una primera función de transferencia que es una función de transferencia por la que se saca una determinada cantidad de desplazamiento de dicha una de entre la unidad de lado con resorte y la unidad de lado sin resorte con respecto a dicha una de entre la parte con resorte y la parte sin resorte cuando se aporta la fuerza de actuador; y una segunda función de transferencia que es una función de transferencia por la que se saca una fuerza real de actuación que es una fuerza que actúa realmente entre la parte con resorte y la parte sin resorte cuando se aporta la cantidad de desplazamiento.
2. El sistema de suspensión según la reivindicación 1, en donde se establece una función de transferencia compuesta como una función recíproca que es el producto de la primera función de transferencia y la segunda función de transferencia, y en donde la parte de determinación de fuerza de objetivo de actuador se configura para determinar la fuerza de objetivo de actuador sobre la base de: un valor de salida obtenido al aportar la fuerza requerida de actuación a la función de transferencia compuesta; y la fuerza inercial.
3. El sistema de suspensión según la reivindicación 2, en donde la parte de determinación de fuerza de objetivo de actuador se configura para determinar la fuerza de objetivo de actuador según una relación entre el valor de salida obtenido al aportar la fuerza requerida de actuación a la función de transferencia compuesta y la fuerza inercial, la relación indica que la diferencia entre el valor de salida y la fuerza de objetivo de actuador corresponde a la fuerza inercial.
4. El sistema de suspensión según cualquiera de las reivindicaciones 1-3, en donde el mecanismo de conexión se configura para conectar: la unidad de lado sin resorte como dicha una de entre la unidad de lado con resorte y la unidad de lado sin resorte; y la parte sin resorte como dicha una de entre la parte con resorte y la parte sin resorte y se configura de tal manera que el resorte de soporte permite que la unidad de lado sin resorte sea soportada elásticamente por la parte sin resorte, y en donde la parte de determinación de fuerza de objetivo de actuador se configura para determinar la fuerza de objetivo de actuador sobre la base de la fuerza requerida de actuación y la fuerza inercial de la unidad de lado sin resorte con respecto al desplazamiento de la parte sin resorte, mientras que se utiliza: la primera función de transferencia por la que se saca una cantidad de desplazamiento de la unidad de lado sin resorte con respecto a la parte sin resorte cuando se aporta la fuerza de actuador; y la segunda función de transferencia por la que se saca la fuerza real de actuación que es una fuerza que actúa realmente entre la parte con resorte y la parte sin resorte cuando se aporta la cantidad de desplazamiento.
5. El sistema de suspensión según cualquiera de las reivindicaciones 1-4, en donde el mecanismo de conexión incluye un amortiguador (70) dispuesto en paralelo con el resorte de soporte y configurado para generar una fuerza de amortiguación con respecto a un movimiento relativo de dicha una de entre la unidad de lado con resorte y la unidad de lado sin resorte y dicha una de entre la parte con resorte y la parte sin resorte.
6. El sistema de suspensión según la reivindicación (5) , en donde la primera función de transferencia y la segunda función de transferencia se establecen sobre la base de un coeficiente de amortiguación del amortiguador.
7. El sistema de suspensión según la reivindicación 6, en donde el amortiguador se configura de tal manera que el coeficiente de amortiguación del mismo se hace diferente dependiendo del sentido del movimiento relativo de dicha una de entre la unidad de lado con resorte y la unidad de lado sin resorte y dicha una de entre la parte con resorte y la parte sin resorte, y
en donde la parte de determinación de fuerza de objetivo de actuador se configura para cambiar la primera función de transferencia y la segunda función de transferencia que se van a utilizar, dependiendo del sentido del movimiento relativo.
8. El sistema de suspensión según la reivindicación 7, que comprende además: un sensor (224) de cantidad e movimiento para detectar una cantidad del movimiento de la parte con resorte y la parte sin resorte al acercarse y alejarse entre sí; y un sensor de cantidad de funcionamiento de motor para detectar una cantidad de funcionamiento del motor electromagnético, en donde la parte de determinación de fuerza de objetivo de actuador se configura para estimar el sentido del movimiento relativo de dicha una de entre la unidad de lado sin resorte y la unidad de lado con resorte y dicha una de entre la parte con resorte y la parte sin resorte, sobre la base de un valor detectado por el sensor de cantidad de movimiento y un valor detectado por el sensor de cantidad de funcionamiento de motor.
Patentes similares o relacionadas:
AMORTIGUADOR NEUMOMAGNÉTICO, del 28 de Abril de 2020, de GARCÍA SUÁREZ, Alexander: 1. Amortiguador neumomagnético, del tipo que comprenden un cilindro con un pistón , que se encuentran definiendo una cámara interior […]
SISTEMA DE AMORTIGUACIÓN AJUSTABLE PARA VEHÍCULOS, del 11 de Octubre de 2019, de TEJERO DAMAS, Victor Manuel: 1. Sistema de amortiguación ajustable para vehículos caracterizado porque está configurado a partir de un amortiguador ajustable formado por un resorte , de tal manera […]
Protección contra fuerzas excesivas en una disposición de suspensión, del 29 de Noviembre de 2018, de Teknologian tutkimuskeskus VTT Oy: Una disposición de suspensión para suspender un objeto a un bastidor y para protección contra fuerzas de excitación excesivas (Fe) transmitidas […]
Dispositivo de válvula para un sistema de suspensión neumática, del 17 de Mayo de 2017, de WABCO GMBH: Dispositivo de válvula para un sistema de suspensión neumática en un vehículo, (a) presentando el dispositivo de válvula al menos una conexión de fuelle (14, […]
Dispositivo de válvula para un sistema de suspensión neumática, del 12 de Abril de 2017, de WABCO GMBH: Dispositivo de válvula para un sistema de suspensión neumática en un vehículo, (a) presentando el dispositivo de válvula al menos una conexión de fuelle , […]
Procedimiento para la regulación de una estructura de suspensión neumática de un vehículo, del 18 de Enero de 2017, de SIEMENS AG OSTERREICH: Procedimiento para la regulación de una estructura de suspensión neumática de un vehículo, en donde desde el estado actual de un vehículo se derivan parámetros […]
 Dispositivo de suspensión eléctrica y motocicleta, del 16 de Marzo de 2016, de YAMAHA HATSUDOKI KABUSHIKI KAISHA: Un dispositivo de suspensión eléctrica para una motocicleta para absorber choques entre una carrocería de vehículo y una rueda trasera […]
Dispositivo de suspensión eléctrica y motocicleta, del 16 de Marzo de 2016, de YAMAHA HATSUDOKI KABUSHIKI KAISHA: Un dispositivo de suspensión eléctrica para una motocicleta para absorber choques entre una carrocería de vehículo y una rueda trasera […]
 Dispositivo y procedimiento de suspensión durante acción por resorte y/o acción de amortiguación para vehículo, del 24 de Febrero de 2016, de BAE SYSTEMS HAGGLUNDS AKTIEBOLAG: Un dispositivo (I; II; III; IV) de suspensión que comprende una configuración de entrada y de salida respectivamente, para un vehículo que comprende […]
Dispositivo y procedimiento de suspensión durante acción por resorte y/o acción de amortiguación para vehículo, del 24 de Febrero de 2016, de BAE SYSTEMS HAGGLUNDS AKTIEBOLAG: Un dispositivo (I; II; III; IV) de suspensión que comprende una configuración de entrada y de salida respectivamente, para un vehículo que comprende […]