Sistema de control de giro para una unidad de propulsión de un buque.
Un sistema de control de giro para una unidad de propulsión (4) de un buque que está provisto de una hélice(5) conectada con enclavamiento a un árbol de accionamiento accionado por un motor principal y que hace giraruna unidad de propulsión (4) del buque instalada en un buque rotativamente alrededor de un árbol de giro a unaposición deseada,
comprendiendo el sistema de control de giro:
una primera unidad de operación para introducir la información de establecimiento de la posición de giroque especifica una posición a la que la unidad de propulsión (4) del buque debe ser girada;
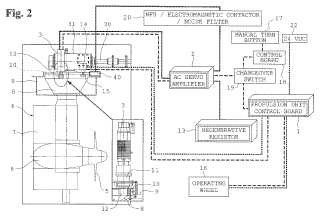
una primera unidad de control para dar salida a una señal de comando de giro que especifica, en base a lainformación de establecimiento de la posición de giro introducida desde la primera unidad de operación, unadirección en la que es la unidad de propulsión (4) del buque debe ser girada y un ángulo con el cual la unidadde propulsión (4) del buque debe ser girado;
un servo amplificador (2) para dar salida a una señal de comando de velocidad en base a la señal de comandode giro de la primera unidad de control ;
un generador que genera, al ser accionado por el árbol de accionamiento, la energía eléctrica que se debesuministrar al servo amplificador (2);
un servo motor (3) que está acoplado a un anillo de giro proporcionado en la unidad de propulsión (4) delbuque rotativamente sobre el árbol de giro y que tiene un detector incorporado para detectar su propio estado,el citado servo motor (3), mientras hace girar a la unidad de propulsión (4) del buque al ser accionadoa una velocidad especificada por una señal de comando de velocidad recibida desde el servo amplificador(2), da salida a la información de retroalimentación de su propia velocidad y la corriente eléctrica al citadoservo amplificador (2) de manera que su estado de operación se puede mantener de acuerdo con la citadaseñal de comando del citado servo amplificador (2) al recoger la información sobre su propio estado del citadodetector incorporado; y
un transmisor de seguimiento para detectar una posición de giro de la unidad de propulsión (4) del buque ydar salida a información sobre la posición de giro detectada como información de detección de posición degiro;
en el que la primera unidad de control compara la información de la posición de giro detectada desde eltransmisor de seguimiento con la información de establecimiento de la posición de giro introducida desde laprimera unidad de operación, y cuando no hay desviación entre la información comparada, da salida a unaseñal de comando de giro al servo amplificador (2 ), estando compuesta la señal de comando de giro parahacer que el servo - amplificador (2) de salida a una señal de comando de velocidad para el servo motor(3), especificando la señal de comando de velocidad la velocidad 0, y en el que:
el generador está estructurado para poder generar, al ser accionado por el árbol de accionamientoque se encuentra rotando a una velocidad de rotación al ralentí, una tensión mínima requerida porel servo - amplificador (2); y
el servo motor (3) tiene una función de control de momento de torsión que mantiene la unidad depropulsión (4) del buque en una posición especificada por la generación de un momento de torsiónde retención opuesto a un potencial externo aplicado a la unidad de propulsión (4) del buque en elcaso en el que el potencial externo no supere un valor límite predeterminado;
un límite de corriente eléctrica predeterminado como un límite de momento de torsión; yuna función de protección de límite de momento de torsión que, cuando la unidad de propulsión (4)del buque está sometida a un potencial externo que supera al citado valor límite predeterminado,de manera que un momento de torsión de espera de este tipo es generado por el servo motor (3)cuando una corriente eléctrica que supera al citado límite de corriente eléctrica circula a través delservo motor (3), permite que la unidad de propulsión (4) del buque gire en la dirección del potencialexterno, con el fin de prevenir daños a la unidad de propulsión (4) del buque.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E09155676.
Solicitante: NIIGATA POWER SYSTEMS CO., LTD.
Nacionalidad solicitante: Japón.
Dirección: 9-7, YAESU 2-CHOME, CHUO-KU TOKYO JAPON.
Inventor/es: KODERA,MASANORI, NANKE,YOSHIKI, SHIRAISHI,KOICHI.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B63H25/24 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B63 BUQUES U OTRAS EMBARCACIONES FLOTANTES; SUS EQUIPOS. › B63H PROPULSION O GOBIERNO MARINO (propulsión de vehículos de colchón de aire B60V 1/14; especialmente adaptados para submarinos que no sean de propulsión nuclear, B63G; especialmente adaptados para torpedos F42B 19/00). › B63H 25/00 Gobierno; Disminución de marcha utilizando medios distintos a los elementos propulsores (que emplean unidades de propulsión fueraborda instaladas de forma amovible B63H 20/00 ); Anclaje o amarre dinámico, es decir, posicionamiento de los buques por medio de elementos propulsores auxiliares o principales. › por medios eléctricos.
- B63H25/42 B63H 25/00 […] › Gobierno o anclaje dinámico por elementos propulsores (con la ayuda de chorros B63H 25/46 ); Gobierno o anclaje dinámico por hélices utilizadas únicamente con este fin; Gobierno o anclaje dinámico por timones que llevan las hélices.
- B63H5/125 B63H […] › B63H 5/00 Instalaciones a bordo de buques de elementos propulsores que actúan directamente sobre el agua. › con montaje móvil con respecto al casco, p.ej. ajustable en dirección (montaje móvil cuyo único fin es el gobierno del timón B63H 25/42).
PDF original: ES-2435915_T3.pdf
Fragmento de la descripción:
Sistema de control de giro para una unidad de propulsión de un buque Campo de la invención La presente invención se refiere a una unidad de propulsión de un buque, denominada genéricamente como un propulsor azimutal, que puede ser, por ejemplo, una unidad de propulsión de tipo Z, una unidad de propulsión de tipo L, o una unidad de propulsión de carena que tiene una función de propulsión y un función de dirección, y más en particular, a un sistema de control de giro que es un sistema de dirección para controlar la dirección de la unidad de propulsión del buque.
Antecedentes de la invención El documento US 2002/0197918 constituye la técnica anterior más próxima.
Para hacer girar un buque utilizando un propulsor azimutal como, por ejemplo, una unidad de propulsión de tipo Z o una unidad de propulsión de carena, se ha utilizado generalmente un sistema hidráulico de giro. La figura 9 muestra un ejemplo de un sistema hidráulico de giro de este tipo. En el sistema, un comando introducido por la operación de una rueda de operación 100 se convierte en una señal eléctrica en una caja de control 101. La señal eléctrica a 15 continuación opera una servo válvula 102 para hacer que funcione una bomba hidráulica 103 (bomba de caudal variable) . La servo válvula 102 puede cambiar la velocidad de descarga y la dirección de descarga de la bomba hidráulica 103. La bomba hidráulica 103 y los motores hidráulicos 104 están conectados a través de un trayecto de circulación. Un depósito de aceite 105 y un filtro de aspiración 106 constituyen una vía de suministro de aceite a través de la cual se suministra el aceite de drenaje recogido para su reutilización. Cuando la bomba hidráulica 103
funciona, los motores hidráulicos 104 son accionados y una unidad de propulsión 110 del buque es girada. El cilindro de giro de la unidad de propulsión 110 del buque está provisto de un transmisor de seguimiento 107 que detecta el ángulo de giro de la unidad de propulsión 110 del buque y da salida al ángulo de giro detectado como información de posición de giro a la caja de control 101.
Como se ha descrito más arriba, un tipo existente de un sistema hidráulico de giro tiene una estructura complicada que incluye varias unidades hidráulicas conectadas a tuberías, tales como la bomba hidráulica 103, la servo válvula 102, el filtro de aspiración 106, y el depósito de aceite 105. Un sistema de este tipo es vulnerable a las fugas de aceite lo cual produce el ensuciamiento del sistema. Cada vez que el sistema desarrolla un fallo, se hace necesario un trabajo de reparación o de espera, por ejemplo, la purga de aire por el llenado de aceite. Esto es un obstáculo para la operación estable del sistema.
Recientemente, para simplificar las estructuras de los sistemas de giro, para retirar las conexiones de tuberías entre las unidades hidráulicas de los sistemas de giro, o evitar el ensuciamiento de los sistemas de giro producido por fugas de aceite, se han propuesto sistemas eléctricos de giro como los que se describen en los documentos JP -A número 2007 -8189 y JP -A número 2004 -131061.
En el sistema eléctrico de giro que se desvela en el documento JP -A número 2007 -8189, el árbol de salida del
motor está provisto de un engranaje de tipo piñón que está acoplado a un engranaje montado en un árbol de dirección. Cuando el motor es accionado bajo control del inversor, el árbol de dirección es girado. El sistema eléctrico de giro que se desvela en el documento JP -A número 2004 -131061 tiene un cono de dirección que incorpora enterizamente un estator y un rotor. El cono de dirección es girado por energía eléctrica.
El sistema de giro que se desvela en el documento JP -U número H06 -71399 es accionado hidráulicamente utili
zando una bomba hidráulica que es accionada por un motor eléctrico. El motor eléctrico es energizado por una fuente de alimentación de energía dentro del buque. Si la fuente de alimentación de energía dentro del buque se estropea y es incapaz de accionar el motor eléctrico, el árbol de accionamiento del motor principal para accionar la hélice del buque acciona un generador para generar la mínima energía eléctrica requerida para la mínima operación de giro.
Aunque en el documento JP -A No. 2007 -8189 se desvela una estructura básica del sistema para hacer girar el árbol de dirección utilizando un motor bajo control del inversor, la forma de controlar con precisión la posición de giro del timón o el momento de torsión aplicado al timón para mantenerlo en una posición especificada no se explica. Para que un sistema de giro sea instalado en un buque, se deben tener en cuenta ciertas consideraciones, por ejemplo, si se va a hacer que el control de giro se ejecute selectivamente tanto desde el lado del puente como desde 50 el lado de la unidad de propulsión y qué medidas tomar si el motor utilizado para la operación de giro no funciona adecuadamente, pero tales consideraciones no se encuentran incluidas en el documento JP -A número 2007 8189. Por lo tanto, el sistema de giro que se desvela en el documento JP -A número 2007 -8189 se encuentra técnicamente muy lejos de ser lo suficientemente bueno para el uso real. En el sistema eléctrico de giro que se desvela en el documento JP -A número 2004 -131061, el motor utilizado para la operación de giro está integrado con la 55 parte que debe ser girada. Una estructura integrada de este tipo es desventajosa cuando se reemplaza o se repara 2
el motor. Por otra parte, el sistema de giro que se desvela en el documento JP -A número 2004 -131061 tiene problemas similares a los que se han descritos más arriba para el sistema de giro que se desvela en el documento JP -A número 2007 -8189.
Cuando se instala un sistema eléctrico de giro en un buque como los que se han descrito más arriba, es necesario suministrar la energía eléctrica necesaria para que el motor eléctrico sea utilizado para la operación de giro. Esto aumenta la capacidad total de suministro de energía requerida por el buque, lo cual produce un aumento en el coste (coste inicial más costes de operación) . En el caso de un buque propulsado eléctricamente que se ha puesto de relieve recientemente, el buque está provisto de una unidad de generación de energía de la capacidad adecuada, de manera que una potencia eléctrica de, por ejemplo, varias decenas de kilovatios necesaria para operar un sistema eléctrico de giro puede ser adquirida. Sin embargo, en el caso de un buque que es operado en general no eléctricamente, el buque solamente está provisto de equipos de generación de energía con una mínima capacidad de carga que solo es lo suficientemente grande para cubrir las cargas dentro del buque. En un caso de este tipo, la energía eléctrica necesaria para operar un sistema eléctrico de giro no se puede adquirir fácilmente. De hecho, ha habido muchos casos en los que, no estando disponible la energía eléctrica requerida, no se puede introducir un sistema eléctrico de giro.
El sistema de giro desvelado en el documento JP -U número H06 -71399 no está libre de aceite, es decir, es un sistema hidráulico de giro, por lo que tiene problemas como los que se han descrito más arriba con respecto a los sistemas hidráulicos. En el sistema de giro, un motor hidráulico es accionado por un motor eléctrico alimentado principalmente por una fuente de alimentación de energía dentro del buque. El sistema de giro está provisto de un generador que es accionado por el árbol de accionamiento del motor principal usado para accionar la hélice del buque. Sin embargo, la capacidad del generador es sólo lo suficientemente grande para generar, en el caso de que la fuente de alimentación de energía dentro del buque se haga inoperativa siendo incapaz de soportar la operación de giro, la energía eléctrica requerida para generar una presión hidráulica mínima que se necesita para llevar a cabo la operación de giro para asegurar una función de dirección mínima.
Sumario de la invención La presente invención aborda los problemas anteriores, y es un objeto de la invención proporcionar un sistema de control eléctrico para controlar el giro de un propulsor azimutal, estando caracterizado el sistema de control de giro como sigue. El sistema de control de giro permite que el timón se mantenga en una posición especificada por el control de posición de giro y el control del momento de torsión precisos. El sistema de control de giro puede ser instalado para su uso en un buque general (propulsada no eléctricamente) que tiene equipos de generación de energía de una capacidad de carga mínima lo suficientemente grande como para cubrir solamente las cargas dentro del buque , sin requerir un coste excesivo... [Seguir leyendo]
Reivindicaciones:
1. Un sistema de control de giro para una unidad de propulsión (4) de un buque que está provisto de una hélice
(5) conectada con enclavamiento a un árbol de accionamiento accionado por un motor principal y que hace girar
una unidad de propulsión (4) del buque instalada en un buque rotativamente alrededor de un árbol de giro a una
5 posición deseada, comprendiendo el sistema de control de giro:
una primera unidad de operación para introducir la información de establecimiento de la posición de giro
que especifica una posición a la que la unidad de propulsión (4) del buque debe ser girada;
una primera unidad de control para dar salida a una señal de comando de giro que especifica, en base a la
información de establecimiento de la posición de giro introducida desde la primera unidad de operación, una
10 dirección en la que es la unidad de propulsión (4) del buque debe ser girada y un ángulo con el cual la uni
dad de propulsión (4) del buque debe ser girado;
un servo amplificador (2) para dar salida a una señal de comando de velocidad en base a la señal de co
mando de giro de la primera unidad de control ;
un generador que genera, al ser accionado por el árbol de accionamiento, la energía eléctrica que se debe
15 suministrar al servo amplificador (2) ;
un servo motor (3) que está acoplado a un anillo de giro proporcionado en la unidad de propulsión (4) del
buque rotativamente sobre el árbol de giro y que tiene un detector incorporado para detectar su propio es
tado, el citado servo motor (3) , mientras hace girar a la unidad de propulsión (4) del buque al ser accionado
a una velocidad especificada por una señal de comando de velocidad recibida desde el servo amplificador
20 (2) , da salida a la información de retroalimentación de su propia velocidad y la corriente eléctrica al citado
servo amplificador (2) de manera que su estado de operación se puede mantener de acuerdo con la citada
señal de comando del citado servo amplificador (2) al recoger la información sobre su propio estado del ci
tado detector incorporado; y
un transmisor de seguimiento para detectar una posición de giro de la unidad de propulsión (4) del buque y
25 dar salida a información sobre la posición de giro detectada como información de detección de posición de
giro;
en el que la primera unidad de control compara la información de la posición de giro detectada desde el
transmisor de seguimiento con la información de establecimiento de la posición de giro introducida desde la
primera unidad de operación, y cuando no hay desviación entre la información comparada, da salida a una
30 señal de comando de giro al servo amplificador (2 ) , estando compuesta la señal de comando de giro para
hacer que el servo -amplificador (2) de salida a una señal de comando de velocidad para el servo motor
(3) , especificando la señal de comando de velocidad la velocidad 0, y en el que:
el generador está estructurado para poder generar, al ser accionado por el árbol de accionamiento
que se encuentra rotando a una velocidad de rotación al ralentí, una tensión mínima requerida por
35 el servo -amplificador (2) ; y
el servo motor (3) tiene una función de control de momento de torsión que mantiene la unidad de
propulsión (4) del buque en una posición especificada por la generación de un momento de torsión
de retención opuesto a un potencial externo aplicado a la unidad de propulsión (4) del buque en el
caso en el que el potencial externo no supere un valor límite predeterminado;
40 un límite de corriente eléctrica predeterminado como un límite de momento de torsión; y
una función de protección de límite de momento de torsión que, cuando la unidad de propulsión (4)
del buque está sometida a un potencial externo que supera al citado valor límite predeterminado,
de manera que un momento de torsión de espera de este tipo es generado por el servo motor (3)
cuando una corriente eléctrica que supera al citado límite de corriente eléctrica circula a través del
45 servo motor (3) , permite que la unidad de propulsión (4) del buque gire en la dirección del potencial
externo, con el fin de prevenir daños a la unidad de propulsión (4) del buque.
2. El sistema de control de giro para una unidad de propulsión (4) de un buque de acuerdo con la reivindicación 1,
en el que:
la primera unidad de operación está provista en un puente del buque;
50 en el que una segunda unidad de operación y una segunda unidad de control se proporcionan en una sala
del motor de dirección del buque (1) , dando salida a una señal de comando de giro que especifica, en base
a la información de establecimiento de la posición de giro introducida desde la segunda unidad de operación, una dirección en la que la unidad de propulsión (4) del buque debe girar y un ángulo con el cual la unidad de propulsión (4) del buque debe ser girada al servo amplificador (2) , y
en el que se proporciona además una unidad de conmutación para la selección como un sistema para con
trolar el servo motor (3) , una de una primera combinación de la primera unidad de operación y de la primera unidad de control y de una segunda combinación de la segunda unidad de operación y de la segunda unidad de control.
3. El sistema de control de giro para una unidad de propulsión (4) del buque de acuerdo con cualquiera de las reivindicaciones 1 a 2, en el que una fuente de alimentación de energía de emergencia está conectada al servo 10 amplificador (2) , la fuente de alimentación de energía de emergencia es para suministrar al servo amplificador
(2) energía eléctrica cuando el generador está desactivado.
4. El sistema de control de giro para una unidad de propulsión (4) del buque de acuerdo con cualquiera de las reivindicaciones 2 y 3, estando provisto el sistema de control de giro de dos o más combinaciones del servo amplificador (2) y del servo motor (3) , estando controladas las dos o más combinaciones, en un estado de ope
ración normal, comúnmente por la primera unidad de operación, por la primera unidad de control, y por el transmisor de seguimiento,
en el que, cuando una de las dos o más combinaciones falla, el servo amplificador (2) de la combinación en fallo se desconecta y las otras combinaciones son controladas por la primera unidad de operación, por la primera unidad de control, y por el transmisor de seguimiento.
Patentes similares o relacionadas:
Sistema de suministro de energía de una embarcación flotante, del 17 de Junio de 2020, de Siemens Energy AS: Un sistema de suministro de energía de una embarcación flotante, en particular, de una embarcación de posicionamiento dinámico en mar abierto, que comprende: - al menos […]
Dispositivo flotante generador de energía eólica, del 11 de Septiembre de 2019, de University Of Ulsan Foundation For Industry Cooperation: Un dispositivo flotante generador de energía eólica que comprende: un cuerpo principal flotante que tiene flotabilidad, de forma que flote sobre el mar, y tiene una […]
Procedimiento para el atraque operado a motor, del 22 de Mayo de 2019, de Kuhn, Andreas: Procedimiento para el atraque operado a motor con un barco , en particular un yate, en un punto de atraque en una zona de atraque, donde en una etapa de elaboración […]
Vehículo mejorado para su uso en agua, en particular en el mar, del 3 de Abril de 2019, de Crazy Dolphin S.r.l: Un vehículo para su uso en agua por un usuario, que comprende: • una tabla flotante , • un componente de cola , acoplado a dicha placa , […]
Propulsión azimutal modular, del 9 de Enero de 2019, de ROLLS-ROYCE MARINE AS: Un propulsor azimutal para propulsar una embarcación, que tiene una carcasa de propulsor alrededor de la que fluye agua, y que comprende: - […]
 Propulsor retráctil, del 21 de Noviembre de 2018, de LEWMAR LIMITED: Un conjunto de propulsor para una embarcación marina, que comprende:
una unidad de hélice ,
un motor ,
un eje de accionamiento que une el motor […]
Propulsor retráctil, del 21 de Noviembre de 2018, de LEWMAR LIMITED: Un conjunto de propulsor para una embarcación marina, que comprende:
una unidad de hélice ,
un motor ,
un eje de accionamiento que une el motor […]
PROPULSOR PORTÁTIL DE MANIOBRA, del 24 de Mayo de 2018, de RESINO BODAS, Santiago: El dispositivo se concreta en una hélice de maniobra, accionada por un motor eléctrico, de 12 o 24 voltios que se lleva en la embarcación a modo […]
SISTEMA DE RECUPERACIÓN DE ENERGÍA CINÉTICA EN UN BARCO, del 12 de Abril de 2018, de GARCIA LAGE, Gerardo: La presente Invención se reitere a un método y un sistema de recuperación de energía cinética en un barco que comprende; un conducta , practicado en el […]