Procedimiento para el control de un equipo de medición de coordenadas controlado por CNC, así como equipo de medición de coordenadas.
Procedimiento para el control de un equipo de medición de coordenadas CNC (1)
- con una plataforma (2) para la recepción de una pieza de trabajo,
- con al menos una estructura que soporta un sensor de contacto (10),
- presentando dicha estructura al menos una primera frecuencia propia mecánica,
- siendo la plataforma (2), que recibe la pieza de trabajo, y la estructura, que soporta el sensor de contacto (10),relativamente móviles entre sí,
- con un palpador (11), compuesto de al menos un elemento palpador (12) y un distanciador (13), estando elelemento palpador conectado con el sensor de contacto por medio del distanciador, y cuyo contacto con una piezade trabajo dispuesta sobre la plataforma es detectada por el sensor de contacto (10),
- con al menos una unidad de accionamiento motriz para la implementación de un movimiento relativo entre la piezade trabajo y el elemento palpador (12),
- presentando la unidad de accionamiento motriz al menos una segunda frecuencia propia que es distinta de laprimera frecuencia propia de la estructura que soporta el sensor de contacto,
- con menos un regulador (15) para la regulación de la unidad de accionamiento, presentando el al menos unregulador al menos un parámetro del regulador que define una función de transferencia del regulador, caracterizadoporque al menos uno de los parámetros del regulador es modificado de tal manera en función de la distancia delelemento palpador (12) de un punto de referencia (14) del sensor de contacto (10) y/o en función de propiedadeselásticas del distanciador (13) en dependencia del palpador (11) usado, en cada caso, para la medición, que elparámetro del regulador se mueve entre los límites definidos por la primera frecuencia natural de la estructura quesoporta el sensor de contacto y por la segunda frecuencia propia de la unidad de accionamiento motriz.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E09006381.
Solicitante: HEXAGON METROLOGY GMBH.
Nacionalidad solicitante: Alemania.
Dirección: SIEGMUND-HIEPE-STRASSE 2-12 35578 WETZLAR ALEMANIA.
Inventor/es: MULLER, HANS-JURGEN, RICHTER,ANDREAS.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01B21/04 FISICA. › G01 METROLOGIA; ENSAYOS. › G01B MEDIDA DE LA LONGITUD, ESPESOR O DIMENSIONES LINEALES ANALOGAS; MEDIDA DE ANGULOS; MEDIDA DE AREAS; MEDIDA DE IRREGULARIDADES DE SUPERFICIES O CONTORNOS. › G01B 21/00 Disposiciones de medida o sus detalles en caso de no adaptarse a los tipos particulares de medios de medida de los otros grupos de esta subclase. › mediante la medida de coordenadas de puntos.
- G05B19/401 G […] › G05 CONTROL; REGULACION. › G05B SISTEMAS DE CONTROL O DE REGULACION EN GENERAL; ELEMENTOS FUNCIONALES DE TALES SISTEMAS; DISPOSITIVOS DE MONITORIZACION O ENSAYOS DE TALES SISTEMAS O ELEMENTOS (dispositivos de maniobra por presión de fluido o sistemas que funcionan por medio de fluidos en general F15B; dispositivos obturadores en sí F16K; caracterizados por particularidades mecánicas solamente G05G; elementos sensibles, ver las subclases apropiadas, p. ej. G12B, las subclases de G01, H01; elementos de corrección, ver las subclases apropiadas, p. ej. H02K). › G05B 19/00 Sistemas de control por programa (aplicaciones específicas, ver los lugares apropiados, p. ej. A47L 15/46; relojes que implican medios anejos o incorporados que permiten hacer funcionar un dispositivo cualquiera en un momento elegido de antemano o después de un intervalo de tiempo predeterminado G04C 23/00; marcado o lectura de soportes de registro con una información digital G06K; registro de información G11; interruptores horarios o de programa horario que se paran automáticamente cuando el programa se ha realizado H01H 43/00). › caracterizado por disposiciones de control para la medida, p. ej. calibración e inicialización, medida de la pieza de trabajo con fines de mecanizado (G05B 19/19 tiene prioridad).
PDF original: ES-2447565_T3.pdf
Fragmento de la descripción:
Procedimiento para el control de un equipo de medición de coordenadas controlado por CNC, así como equipo de medición de coordenadas La invención se refiere a un procedimiento para el control de un equipo de medición de coordenadas controlado por CNC (control numérico por ordenador) y un equipo de medición de coordenadas.
Al estado actual de la técnica (DE 102 29 821 B4) pertenecen equipos de medición de coordenadas con tres componentes desplazables linealmente dispuestos perpendiculares entre sí, cuyo perímetro de movimientos despliega un sistema de coordenadas cartesianas. En el extremo de dichos componentes, habitualmente denominado pínula, se encuentra dispuesto, la mayoría de las veces, un sensor que detecta el contacto de un elemento palpador, conectado a él, con una pieza de trabajo dispuesta dentro del sistema de coordenadas desplegado por los tres ejes lineales. Dicho sensor, en lo sucesivo denominado „cabezal palpador“, es, frecuentemente, un sensor táctil que comprende una parte fija, por ejemplo una carcasa, conectada fija con la pínula, así como una parte móvil en tres direcciones respecto de la parte fija (generalmente y en lo sucesivo de esta solicitud denominada “báscula de cabezal palpador”) que está conectada por medio de un distanciador con el elemento palpador, por ejemplo una bola de palpación. El distanciador es, generalmente, una varilla que se compone, por su parte, de un vástago de palpador y, eventualmente, una o más extensiones y piezas de conexión. Habitualmente y en el desarrollo ulterior de esta solicitud, la combinación de elemento palpador y distanciador es denominada palpador.
Además, pertenecen al estado actual de la técnica ejes rotatorios como mesas giratorias o las denominadas articulaciones giratorias y pivotantes con cuya ayuda la pieza de trabajo y/o el cabezal palpador pueden ser girados sobre ejes horizontales y/o ejes verticales.
Cuando en lo sucesivo se hable de “ejes”, dicho concepto incluye todos los ejes de movimiento posibles, sean éstos lineales o rotativos, de la pieza de trabajo y/o del cabezal palpador. La extensión de protección de la invención se refiere, expresamente, a todos estos ejes del movimiento.
Cuando los ejes del cabezal palpador se mueven hacia la pieza de trabajo de tal manera que el elemento palpador llegue a estar en contacto con la pieza del trabajo, la báscula del cabezal palpador es desviada respecto de su parte fija, siendo disparada una señal de palpación o medida la magnitud y el sentido de dicha desviación mediante un sistema sensor apropiado.
En estado de reposo, la báscula de cabezal palpador es retenida en el estado de reposo mediante fuerzas de reposición, pudiendo dichas fuerzas de reposición ser producidas, por ejemplo, mediante resortes o generadores de fuerza, por ejemplo sistemas de bobinas móviles.
Debido a que el elemento palpador tiene junto con el distanciador y la báscula de cabezal palpador una masa finita, el mismo está sometido en la aceleración del cabezal palpador a fuerzas inerciales que pueden producir una desviación importante, no deseada, de la báscula de cabezal palpador antes del contacto del elemento palpador con una pieza de trabajo.
En el denominado proceso de escaneado, en el que el elemento palpador es conducido en contacto continuo por encima de la pieza de trabajo, el sistema de muelle-masa, compuesto de la masa del distanciador y de la báscula de cabezal palpador, forma junto con la rigidez del distanciador un sistema oscilatorio que, en operación de escaneado, es activado bajo condiciones operativas desfavorables, lo que puede producir errores de medición.
Al estado actual de la técnica (DE 102 29 821 B4) pertenece un procedimiento para el control de un equipo de medición de coordenadas con una masa de palpador variable en el que en función de la masa del palpador se ajustan valores nominales de trayectoria de movimientos de un equipo de medición de coordenadas, por ejemplo la aceleración y la velocidad. De este modo se soluciona el problema técnico de que, en un modo de desplazamiento dinámico, eventualmente debido a las fuerzas inerciales actuantes sobre el elemento palpador, el elemento palpador es desviado lo suficiente de su posición de descanso como para simular una palpación sin estar en contacto con una pieza de trabajo.
Este procedimiento perteneciente al estado actual de la técnica presenta la desventaja de que, por ejemplo, con una masa correspondiente del palpador, la velocidad y la aceleración son ajustadas –especialmente reducidas-de tal manera que aumenta ostensiblemente el tiempo de medición total.
Además, al estado actual de la técnica (DE 10 2005 032 749 A1) pertenece un procedimiento para la palpación de una pieza de trabajo mediante un equipo de medición de coordenadas en el que el avance y el retraso de una pista de escaneado es ajustado en función de la rigidez o de la masa de un palpador. Este procedimiento perteneciente al estado actual de la técnica consigue el objetivo de atenuar al principio y al final de una pista de escaneado los procesos de estabilización y extinción de oscilaciones en lo que se refiere a su influencia sobre el resultado de la
medición. Este procedimiento perteneciente al estado actual de la técnica presenta la desventaja de que, antes del escaneado y/o después del escaneado, el elemento palpador es movido a lo largo de una pista de avance o de retraso, con lo cual el tiempo de medición aumenta ostensiblemente.
Además, al estado actual de la técnica (DE 10 2005 016 019 A1) pertenece un procedimiento para el ajuste de la sensibilidad del sistema de palpación de un sistema de medición de coordenadas, en el que los parámetros operativos de un sistema de palpación son cambiados automáticamente debido a parámetros de sensibilidad especificados por el usuario del equipo de medición de coordenadas para, por ejemplo, ajustar las fuerzas de contacto a la blandura de una pieza de trabajo a palpar. Además, de acuerdo a este estado actual de la técnica se propone modificar otro parámetro operativo del equipo de medición de coordenadas, por ejemplo la velocidad de palpación en función del parámetro de sensibilidad especificado. Este procedimiento perteneciente al estado actual de la técnica presenta la desventaja de que, de acuerdo con este procedimiento, las oscilaciones del sistema de palpación no son minimizadas Además, al estado actual de la técnica (DE 102 29 821 B4) pertenece un equipo de medición de coordenadas y un procedimiento para el control de un equipo de medición de coordenadas con masa de cabezal palpador variable. De acuerdo con dicha documentación no está previsto un control con modificación de parámetros, de manera que este procedimiento perteneciente al estado actual de la técnica también presenta el inconveniente de que no se minimizan oscilaciones del sistema de preparación.
Además, al estado actual de la técnica (EP 0 469 617 B1) pertenece un sistema que se compone de un circuito de lazo cerrado con un filtro adaptivo. De acuerdo con este sistema se limita una aceleración máxima de un dispositivo de control de velocidad del motor. Esta aceleración máxima es una magnitud de entrada para un regulador y no un parámetro del regulador, de manera que de acuerdo con dicha documentación una regulación adaptada a los diferentes sistemas de palpación de un equipo de medición de coordenadas no puede ser implementada.
Bajo el concepto “parámetros de regulación” no deben entenderse, expresamente, aquí y en el curso de la solicitud ni una magnitud entrada (valor nominal) ni una magnitud de ajuste o una magnitud de regulación (valor real) , sino exclusivamente deben entenderse magnitudes que influyan en la función de transferencia de amplitudes del regulador en el intervalo de amplitudes de frecuencias, o sea, por ejemplo, la amplificación del circuito de un regulador de acción proporcional.
El problema técnico en el que se basa la invención consiste en indicar un procedimiento para el control de un equipo de medición de coordenadas controlado numéricamente, en el que es minimizada la estimulación del sistema oscilatorio compuesto de masa de báscula de cabezal palpador, inclusive la masa de palpador y rigidez de palpador (rigidez a la flexión del elemento palpador con distanciador) . Además, se quiere indicar un equipo de medición de coordenadas en el que la estimulación del sistema oscilatorio, compuesto de masa de cabezal palpador inclusive la masa de palpador y rigidez de palpador, es minimizada.
Dicho problema técnico es solucionado por medio de un procedimiento con las características de acuerdo con la reivindicación 1 así como mediante un equipo de... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento para el control de un equipo de medición de coordenadas CNC (1)
- con una plataforma (2) para la recepción de una pieza de trabajo,
- con al menos una estructura que soporta un sensor de contacto (10) ,
- presentando dicha estructura al menos una primera frecuencia propia mecánica,
- siendo la plataforma (2) , que recibe la pieza de trabajo, y la estructura, que soporta el sensor de contacto (10) , relativamente móviles entre sí,
- con un palpador (11) , compuesto de al menos un elemento palpador (12) y un distanciador (13) , estando el elemento palpador conectado con el sensor de contacto por medio del distanciador, y cuyo contacto con una pieza de trabajo dispuesta sobre la plataforma es detectada por el sensor de contacto (10) ,
- con al menos una unidad de accionamiento motriz para la implementación de un movimiento relativo entre la pieza de trabajo y el elemento palpador (12) ,
- presentando la unidad de accionamiento motriz al menos una segunda frecuencia propia que es distinta de la primera frecuencia propia de la estructura que soporta el sensor de contacto,
- con menos un regulador (15) para la regulación de la unidad de accionamiento, presentando el al menos un regulador al menos un parámetro del regulador que define una función de transferencia del regulador, caracterizado porque al menos uno de los parámetros del regulador es modificado de tal manera en función de la distancia del elemento palpador (12) de un punto de referencia (14) del sensor de contacto (10) y/o en función de propiedades elásticas del distanciador (13) en dependencia del palpador (11) usado, en cada caso, para la medición, que el parámetro del regulador se mueve entre los límites definidos por la primera frecuencia natural de la estructura que soporta el sensor de contacto y por la segunda frecuencia propia de la unidad de accionamiento motriz.
2. Procedimiento según la reivindicación 1, caracterizado porque como sensor de contacto (10) se usa un cabezal palpador conmutador o un cabezal palpador medidor (2) .
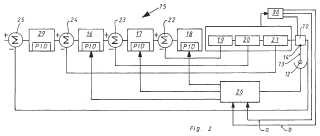
3. Procedimiento según una de las reivindicaciones precedentes, caracterizado porque es usado un regulador (15) con una estructura en cascada, estando previsto un regulador de posición (16) para la posición de un eje a regular, un regulador de velocidad (17) para la velocidad de la unidad de accionamiento motriz y un regulador de intensidad de corriente (18) para la fuerza de accionamiento o el par de la unidad de accionamiento motriz, y porque el regulador de velocidad (17) está subordinado al regulador de posición (16) y el regulador de intensidad de corriente
(18) está subordinado al regulador de velocidad (17) .
4. Procedimiento según la reivindicación 3, caracterizado porque el regulador de posición (16) tiene en orden superior un regulador de escaneado (29)
5. Procedimiento según una de las reivindicaciones 1 o 2, caracterizado porque como regulador (15) se usa un regulador en cascada o un regulador digital.
6. Procedimiento según una de las reivindicaciones 3 o 4, caracterizado porque al menos un parámetro del regulador de escaneado (29) o del regulador de posición (16) o del regulador de velocidad (17) o del regulador de intensidad de corriente (18) es modificado en función de la distancia del elemento palpador (12) del punto de referencia (14) del sensor de contacto (10) y/o en función de las propiedades elásticas del distanciador (13) en dependencia de la combinación de palpadores cambiados en cada caso.
7. Procedimiento según una de las den indicaciones 3 o 4, caracterizado porque una combinación de parámetros del regulador de escaneado (29) y/o del regulador de posición (16) y/o del regulador de velocidad (17) y/o del regulador de intensidad de corriente (18) es modificado en función de la distancia del elemento palpador (12) del punto de referencia (14) del sensor de contacto (10) y/o en función de las propiedades elásticas del distanciador (13) en dependencia de la combinación de palpadores cambiados en cada caso.
8. Procedimiento según una de las reivindicaciones precedentes, caracterizado porque las magnitudes de elementos palpadores (12) y distanciadores (13) que caracterizan un peso y una rigidez están almacenadas en una base de datos (26) y son usadas, automáticamente, para un ajuste de los parámetros del regulador al cambiar la respectiva combinación de elemento palpador (12) y distanciador (13) .
9. Procedimiento según una de las reivindicaciones 6 o 7, caracterizado porque las magnitudes características necesarias para el ajuste de los parámetros del regulador son obtenidas del resultado de una calibración de palpador.
10. Procedimiento según una de las reivindicaciones precedentes, caracterizado porque los parámetros del regulador son ajustados de manera continua durante un proceso de escaneado.
11. Equipo de medición de coordenadas (1)
- con una plataforma (2) para la recepción de una pieza de trabajo,
- con al menos una estructura que soporta un sensor de contacto (10) ,
- presentando dicha estructura al menos una primera frecuencia propia mecánica,
- siendo la plataforma, que recibe la pieza de trabajo, y la estructura, que soporta el sensor de contacto (10) , relativamente móviles entre sí,
- con un palpador (11) que se compone de al menos un elemento palpador (12) y un distanciador, estando el elemento palpador conectado con el sensor de contacto (10) por medio del distanciador, y cuyo contacto con una pieza de trabajo dispuesta sobre la plataforma es detectada por el sensor de contacto (10) ,
- con al menos una unidad de accionamiento motriz para la implementación del movimiento relativo entre la pieza de trabajo y el elemento palpador (12) ,
- presentando la unidad de accionamiento motriz al menos una segunda frecuencia propia que es distinta de la primera frecuencia propia de la estructura que soporta el sensor de contacto,
- con un control que presenta al menos un regulador (15) para la regulación de la unidad de accionamiento motriz,
- presentando el al menos un regulador (15) al menos un parámetro del regulador que define la función de transferencia del regulador, caracterizado porque el equipo de medición de coordenadas (1) presenta una unidad de cálculo (27) que está configurado como una unidad de cálculo que modifica los parámetros del al menos un regulador (15) caracterizadores de la función de transferencia del al menos un regulador en función de la distancia del elemento palpador (12) de un punto de referencia (14) del sensor de contacto (10) y/o en función de propiedades elásticas del distanciador (13) en dependencia de la combinación de palpadores cambiados en cada caso, y porque la unidad de cálculo (27) está configurada como una unidad de cálculo que modifica de tal manera el al menos un parámetro del regulador, que el parámetro del regulador se mueva entre los límites definidos por la estructura que mediante la primera frecuencia propia soporta el sensor de contacto y por la segunda frecuencia propia de la unidad de accionamiento motriz.
12. Equipo de medición de coordenadas (1) según la reivindicación 11, caracterizado porque el control presenta, adicionalmente, una base de datos (26) en la que están almacenadas las magnitudes caracterizadoras de un peso o una rigidez de elementos palpadores (12) y distanciadores (13) para diferentes combinaciones de elementos palpadores (12) y distanciadores (13) y que al usar la combinación respectiva son requeridas para el cálculo de los parámetros del regulador.
13. Equipo de medición de coordenadas (1) según la reivindicación 11, caracterizado porque el control presenta un módulo que está implementado como un módulo que usa para el cálculo de los parámetros del regulador los resultados (28) de una calibración del palpador.
14. Equipo de medición de coordenadas (1) según la reivindicación 11, caracterizado porque el sensor de contacto
(10) está conformado como cabezal palpador conmutador o como cabezal palpador medidor.
15. Equipo de medición de coordenadas (1) según la reivindicación 11, caracterizado porque el equipo de medición de coordenadas presenta tres ejes móviles lineares (X, Y, Z) que despliegan un sistema de coordenadas cartesianas.
16. Equipo de medición de coordenadas (1) según la reivindicación 15, caracterizado porque el equipo de medición de coordenadas presenta, adicionalmente, al menos un eje rotativo.
17. Equipo de medición de coordenadas (1) según la reivindicación 11, caracterizado porque el equipo de medición de coordenadas presenta exclusivamente ejes rotativos.
18. Equipo de medición de coordenadas (1) según la reivindicación 11, caracterizado porque el regulador (15) presenta una estructura en cascada, estando previsto un regulador de posición (16) para la posición de un eje a regular, un regulador de velocidad (17) para la velocidad de la unidad de accionamiento motriz y un regulador de intensidad de corriente (18) , y porque el regulador de velocidad (17) está subordinado al regulador de posición (16) y el regulador de intensidad de corriente (18) está subordinado al regulador de velocidad (17) .
19. Equipo de medición de coordenadas (1) según la reivindicación 18, caracterizado porque el regulador de posición (16) tiene en orden superior un regulador de escaneado (29) .
20. Equipo de medición de coordenadas (1) según la reivindicación 11, caracterizado porque el reguladora (15) está conformado como regulador en cascada o como regulador digital.
Patentes similares o relacionadas:
Método de medición de una distancia, del 17 de Junio de 2020, de The Chugoku Electric Power Co., Inc: Un método de medición de una distancia que comprende: instalar un miembro de referencia en una superficie de un primer miembro metálico (P1), e instalar un miembro […]
Punta para un escáner óptico, del 25 de Diciembre de 2019, de 3SHAPE A/S: Una punta para un escáner 3D, en donde la punta comprende: - un armazón de punta , donde una primera parte (605a) del armazón comprende un primer material […]
Malla adaptativa de resolución para realizar metrología en 3-d de un objeto, del 6 de Noviembre de 2019, de THE BOEING COMPANY: Un metodo (200, 200') para generar una malla adaptativa de resolucion para la metrologia 3-D de un objeto , que comprende: recibir […]
Dispositivo de medición y procedimiento para la medición por triangulación, del 5 de Junio de 2019, de Pepperl+Fuchs AG: Dispositivo de medición para la medición por triangulación, que presenta - un transmisor de luz para emitir luz de iluminación en un modo de medición, […]
Procedimiento y dispositivo para la determinación de la posición de un sensor, del 17 de Mayo de 2019, de Carl Zeiss Optotechnik GmbH: Procedimiento para la determinación de la posición en el espacio de un sensor en diferentes posiciones de captación, en el que, para la determinación […]
Sistema de monumento montado en robótica para sistemas de metrología, del 14 de Febrero de 2019, de THE BOEING COMPANY: Un aparato que comprende: uno o más vehículos robóticos, en donde cada uno del uno o más vehículos robóticos está configurado para moverse a una posición respectiva […]
Procedimiento para medir el estado de una vía usando un vehículo en funcionamiento, y vehículo en funcionamiento para medir el estado de una vía, del 9 de Enero de 2019, de NIPPON STEEL CORPORATION: Procedimiento de medición de un estado de una vía (R) usando un vehículo para operaciones comerciales, en el que el vehículo para operaciones comerciales […]
Dispositivo auxiliar y procedimiento para colocar a medida una disposición de medición óptica que se puede montar en un manipulador, del 10 de Enero de 2018, de KUKA ROBOTER GMBH: Dispositivo auxiliar para la colocación a medida de una disposición de medición óptica que puede montarse en un manipulador , […]