TELÉMETRO 3D Y PROCEDIMIENTO DE OBTENCIÓN MEDIANTE CABECEO DE UN TELÉMETRO LÁSER 2D ALREDEDOR DE SU CENTRO ÓPTICO.
Telémetro láser 3D y procedimiento de obtención mediante cabeceo de un telémetro láser 2D alrededor de su centro óptico manteniendo su máximo campo de visión.
El telémetro láser 2D (a) rota a velocidad constante mediante un servo-motor dotado de codificador angular situado en una base (f), que hace cabecear el telémetro láser 2D en torno a su centro óptico (c). Así se mantiene el mínimo rango de distancias del telémetro láser 2D, se evita la calibración de la distancia al centro de rotación y se reduce el tiempo de toma de medidas. La adquisición de distancias se realiza de forma sincronizada con los ángulos del eje del motor y de inclinación del aparato. Ello permite obtener las coordenadas Cartesianas, respecto de un sistema de referencia situado en el centro óptico y con uno de sus ejes alineado con la gravedad, de los rangos asociados a los puntos detectados.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201001410.
Solicitante: UNIVERSIDAD DE MALAGA.
Nacionalidad solicitante: España.
Inventor/es: FERNANDEZ LOZANO,JUAN JESUS, GARCIA CEREZO,ALFONSO JOSE, MARTINEZ RODRIGUEZ,JORGE LUIS, REINA TEROL,ANTONIO JESUS, MORALES RODRIGUEZ,JESUS, PEQUEÑO BOTER,ALEJANDRO, MANDOW ANDALUZ,Antonio.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01B11/02 FISICA. › G01 METROLOGIA; ENSAYOS. › G01B MEDIDA DE LA LONGITUD, ESPESOR O DIMENSIONES LINEALES ANALOGAS; MEDIDA DE ANGULOS; MEDIDA DE AREAS; MEDIDA DE IRREGULARIDADES DE SUPERFICIES O CONTORNOS. › G01B 11/00 Disposiciones de medida caracterizadas por la utilización de medios ópticos (instrumentos de los tipos cubiertos por el grupo G01B 9/00 en sí G01B 9/00). › para la medida de la longitud, la anchura o el espesor (G01B 11/08 tiene prioridad).
- G01S17/32 G01 […] › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 17/00 Sistemas que utilizan la reflexión o rerradiación de ondas electromagnéticas que no sean ondas de radio, p. ej. sistemas lidar. › que utilizan la transmisión de ondas continuas, tanto moduladas en amplitud, en frecuencia o en fase, como no moduladas.
Fragmento de la descripción:
Telémetro 3D y procedimiento de obtención mediante cabeceo de un telémetro láser 2D alrededor de su centro óptico.
Campo de la invención
La presente invención se refiere al sector de sensores de distancia industriales. Concretamente se puede encuadrar dentro de los telémetros láser tridimensionales (3D) basados en telémetros láser bidimensionales (2D) .
Antecedentes de la invención
Obtener datos tridimensionales (3D) resulta de gran interés en diversos campos industriales, como la robótica o los sistemas de producción. Una posibilidad es el empleo de telémetros láser 3D como los usados habitualmente en topografía (por ejemplo [1]) . No obstante, estos sistemas presentan un elevado coste, peso y lentitud de adquisición de datos. Una alternativa es usar telémetros láser 2D comerciales servo-controlados para obtener datos 3D (por ejemplo [2]) .
Sin embargo, en estos sistemas obtenidos por modificación de telémetros 2D, la rotación extra no está centrada en el centro óptico del telémetro láser 2D, esto es, el centro del espejo rotatorio del mismo (por ejemplo [3]) . Esto ocasiona que aumente la distancia mínima de detección del telémetro láser 3D, lo que en ámbitos como la robótica puede ser un grave inconveniente, al poder darse el caso de que no se detecten obstáculos cercanos al robot. Además, se complica la obtención de las coordenadas Cartesianas de los puntos láser, ya que aparece una distancia entre el centro óptico y el de rotación que resulta necesario calibrar con precisión. Este problema no aparecería si se usara el centro óptico del sensor láser 2D como centro de rotación, ya que cada fabricante tiene bien especificada su situación en sus aparatos. Existe algún precedente de sistemas que hacen girar el láser 2D en torno al centro óptico (por ejemplo [4]) , pero el giro que aplican es de alabeo. Este giro de alabeo conlleva una distribución de puntos en el espacio menos útil que si el giro fuese de cabeceo, ya que quedan menos cubiertas las áreas periféricas. Por este motivo, se hace menos segura la rápida detección de móviles cercanos al aparato. Además, la información obtenida ofrece una peor correspondencia con la proporcionada por cámaras de vídeo. Estos problemas limitan su utilización en varios campos, como por ejemplo la robótica móvil o la detección de obstáculos.
Otra opción diferente es la adición al sensor láser 2D de un espejo exterior servo-controlado (por ejemplo [5]) . Este tipo de sistemas, aunque más sencillos desde el punto de vista mecánico, conllevan reducir el campo de visión del barrido bidimensional, con lo que el sistema resultante queda limitado. Además, también requiere la calibración de la distancia del centro del espejo interno al externo.
Referencias
[1] Zoller+Fröhlich Company (2010) . Technical data Z+F IMAGER 5006h, http://www.zf-laser.com.
[2] O. Wulf yB. Wagner (2003) . Fast 3D Scanning Methods for Laser Measurement Systems, Proc. International Conference on Control Systems and Computer, Bucarest (Rumania) , páginas 312-317.
[3] H. Surmann, K. Lingemann, A. Nüchter yJ. Hertzberg (2001) . A 3D laser range finder for autonomous mobile robots, Proc. of the 32th International Symposium on Robotics, páginas 153-158, Seúl (Corea del Sur) .
[4] M. Walther, P. Steinhaus yR. Dillmann (2006) . A foveal 3D laser scanner integrating texture into range data, Proc. 9th International Conference on Intelligent Autonomous Systems, Tokio (Japón) .
[5] J. Ry de yH. Hu (2008) . 3D Laser Range Scanner with Hemispherical Field of Yiew for Robot Navigation, Proc. of the IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Xian (China) .
Descripción de la invención
La presente invención consiste en un telémetro láser 3D y en el procedimiento de obtención mediante cabeceo de un telémetro láser 2D alrededor de su centro óptico manteniendo su máximo campo de visión. El aparato comprende un sistema mecánico, un sistema actuador y un sistema de comunicaciones.
El sistema mecánico permite realizar giros a velocidad constante alrededor del centro óptico del telémetro láser 2D manteniendo el máximo campo de visión de este último. El sistema actuador permite hacer giros de cabeceo rápidos mediante un servo-motor que cuenta con un codificador angular. El sistema de comunicaciones recibe, a través de un puerto serie, comandos de una computadora, y le envía puntos en coordenadas Cartesianas respecto del centro del aparato de cada uno de los rangos medidos. Para ello, coordina la adquisición de distancias del telémetro láser 2D de forma sincronizada con los ángulos de inclinación del aparato y del eje del motor.
Al girar alrededor del centro óptico del telémetro láser 2D se consigue mantener el mínimo rango de distancias del telémetro láser 2D, y se evita la calibración de la distancia al centro de rotación. Asimismo, al no precisar de calibración, el telémetro 3D obtenido a partir de un telémetro láser 2D comercial obtiene una precisión equivalente a éste, al tiempo que tiene un coste reducido.
Breve descripción de los dibujos
En los dibujos adjuntos se muestra una realización preferida del telémetro 3D objeto de la invención, constituido de acuerdo con la invención y dado a título de ejemplo no limitativo.
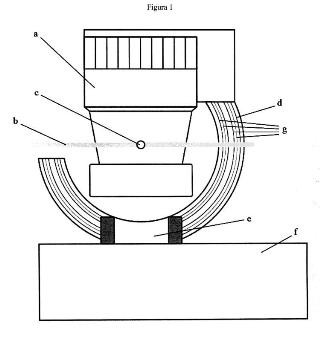
Figura 1: Esquema general del telémetro láser 3D en vista lateral. Se puede observar el telémetro 2D (a) , con su plano de medidas (b) y su centro óptico (c) ; la guía circular rígida (d) y los patines (e) situados en la base (f) . La guía cuenta con unos canales de rodadura (g) . La base contiene también el sistema actuador (a excepción de la correa de tracción) y el sistema de comunicaciones.
Figura 2: Esquema general del telémetro láser 3D en vista frontal. Se puede observar el telémetro 2D (a) , con su plano de medidas (b) y su centro óptico (c) ; la guía circular (d) y los patines (e) situados en la base (f) .
Figura 3: Esquema general del sistema actuador. Se pueden observar el motor de corriente continua (g) , con codificador angular (h) y reductora (i) con polea dentada (k) , correa de tracción (j) engranada en una polea dentada (k) y dos poleas locas (l) .
Descripción detallada de un modo de realización
A continuación se describe un ejemplo de realización de la invención de carácter no limitativo.
El sistema mecánico (figura 1) permite mover un telémetro 2D (a) , con un plano de medidas (b) , en torno a su centro óptico (c) . Consta de una guía circular rígida (d) y dos patines (e) , sólo uno de ellos visible en la vista de perfil, situados en la base (f) del sensor a ambos lados de la guía circular rígida (d) . Los patines (e) permiten el movimiento de la guía circular rígida (d) mediante recirculación interna de bolas. Para las bolas, la guía circular rígida (d) posee cuatro canales de rodadura (g) . Sobre esta guía circular rígida (d) se sitúa el telémetro láser 2D (a) . El centro óptico (c) del telémetro láser 2D (a) se hace coincidir con el centro de cabeceo, por lo que, de esta forma, también es el centro del telémetro láser 3D. La guía circular rígida (d) es preferiblemente estrecha para mantener el máximo campo de visión del telémetro láser 2D (a) .
En una vista frontal del sistema mecánico (figura 2) se muestran varios de los elementos anteriores. Puede apreciarse el telémetro 2D (a) , junto con su plano de medidas (b) y su centro óptico (c) . También puede verse la guía circular rígida (d) y los patines (e) . Por último, todo el conjunto se apoya sobre la base (f) .
El sistema actuador (figura 3) proporciona el giro de cabeceo al telémetro láser 2D (a) . Este sistema consta de motor de corriente continua (g) dotado de codificador angular (h) acoplado a un extremo de su eje y de una reductora
(i) con polea dentada (k) en el otro, una correa de tracción (j) engranada en una polea dentada (k) y dos poleas locas (l) . Por último, completa el sistema la electrónica de control, que no se muestra en la figura, pero que permite que el sistema actuador rote el telémetro láser 2D (a) a una velocidad constante. También cuenta con dos inclinómetros alineados con los ejes longitudinal y transversal del aparato, para la obtención de las coordenadas Cartesianas. En el borde exterior de la guía circular...
Reivindicaciones:
1. Procedimiento de obtención de un telémetro láser 3D mediante cabeceo de un telémetro láser 2D caracterizado porque comprende:
a. Girar a velocidad constante un telémetro láser 2D alrededor de su centro óptico, manteniendo el máximo campo de visión del telémetro láser 2D sin requerir calibración de la distancia al centro de rotación;
b. Realizar giros de cabeceo rápidos del telémetro láser 2D, haciendo coincidir el centro óptico del mismo con el centro de cabeceo; y
c. Coordinar la adquisición de distancias del telémetro láser 2D de forma sincronizada con los ángulos de inclinación del aparato y del eje del motor.
2. Procedimiento de obtención de un telémetro láser 3D mediante cabeceo de un telémetro láser 2D según la reivindicación anterior caracterizado porque el giro a velocidad constante un telémetro láser 2D alrededor de su centro óptico se regula mediante una electrónica de control, y se realiza a través de una guía circular rígida mediante al menos dos patines situados en la base del sensor a ambos lados de la guía.
3. Procedimiento de obtención de un telémetro láser 3D mediante cabeceo de un telémetro láser 2D según la reivindicación anterior caracterizado porque los patines soportan el movimiento de la guía circular rígida mediante recirculación interna de bolas.
4. Procedimiento de obtención de un telémetro láser 3D mediante cabeceo de un telémetro láser 2D según cualquiera de las reivindicaciones anteriores caracterizado porque los giros de cabeceo rápidos se realizan mediante un servo-motor dotado de un codificador angular.
5. Procedimiento de obtención de un telémetro láser 3D mediante cabeceo de un telémetro láser 2D según la reivindicación anterior caracterizado porque el servo-motor mueve una correa de tracción engranada en una polea dentada y en dos poleas locas que dirigen la correa de tracción hacia la polea dentada, regulándose el movimiento de dicha polea dentada mediante una reductora.
6. Procedimiento de obtención de un telémetro láser 3D mediante cabeceo de un telémetro láser 2D según cualquiera de las reivindicaciones anteriores caracterizado porque las coordenadas Cartesianas se obtienen gracias a dos inclinómetros alineados con los ejes longitudinal y transversal del telémetro láser 2D.
7. Telémetro láser 3D obtenido mediante cabeceo de un telémetro láser 2D caracterizado porque comprende:
a. Sistema mecánico que mediante una electrónica de control realiza giros a velocidad constante alrededor del centro óptico (c) de un telémetro láser 2D (a) manteniendo el máximo campo de visión de este último y sin requerir calibración de la distancia al centro de rotación;
b. Sistema actuador que realiza giros de cabeceo rápidos del telémetro láser 2D (a) ; y
c. Sistema de comunicaciones que recibe comandos de una computadora, y envía a dicha computadora puntos en coordenadas Cartesianas respecto del centro óptico (c) del telémetro láser 2D (a) de cada uno de los rangos medidos.
8. Telémetro láser 3D según la reivindicación anterior caracterizado porque el sistema mecánico mueve un telémetro láser 2D (a) , con un plano de medidas (b) , en torno a su centro óptico (c) a través de una guía circular rígida (d) mediante al menos dos patines (e) situados en la base del sensor (f) a ambos lados de la guía.
9. Telémetro láser 3D según la reivindicación anterior caracterizado porque los patines (e) soportan el movimiento de la guía circular rígida (d) mediante recirculación interna de bolas, comprendiendo la guía circular rígida (d) al menos cuatro canales de rodadura (g) .
10. Telémetro láser 3D según cualquiera de las reivindicaciones 7 a 9 caracterizado porque el sistema actuador gestiona la realización de giros de cabeceo rápidos mediante un servo-motor (g) dotado de un codificador angular (h) .
11. Telémetro láser 3D según la reivindicación anterior caracterizado porque:
a. El servo-motor (g) es de corriente continua y está acoplado, por los extremos de su eje, por un lado al codificador angular (h) y por otro lado a una reductora (i) de una polea dentada (k) ;
b. Comprende una correa de tracción (j) engranada en la polea dentada (k) y en dos poleas locas (l) .
12. Telémetro láser 3D según la reivindicación anterior caracterizado porque las poleas locas (l) dirigen la correa de tracción (j) hacia la polea dentada (k) , y tanto las poleas locas (l) como la polea dentada (k) disponen de lengüetas para evitar el descarrilamiento de la correa de tracción (j) .
13. Telémetro láser 3D según cualquiera de las reivindicaciones 7 a 12 caracterizado porque la obtención de las coordenadas Cartesianas se realiza gracias a dos inclinómetros alineados con los ejes longitudinal y transversal del telémetro láser 2D (a) .
Patentes similares o relacionadas:
Bastón medidor de distancia, del 20 de Julio de 2020, de FERNANDEZ PAEZ, Margarita Ester: 1. Bastón medidor de distancia para su utilización preferente en el juego de la petanca que se caracteriza porque el bastón calza sobre el boliche a través de un […]
DISPOSITIVO ÓPTICO DE COMPROBACIÓN DE LA HINCA DE UN PILOTE, del 11 de Junio de 2020, de UNIVERSIDAD POLITECNICA DE MADRID: Dispositivo óptico de comprobación de la hinca de un pilote que comprende una estructura portante, una cámara , un brazo articulado, que a su vez comprende […]
Dispositivo de prueba o verificación y método de control de una superficie exterior de una pieza separada por rotura o fractura, del 25 de Marzo de 2020, de ALFING KESSLER SONDERMASCHINEN GMBH: Método para comprobar una superficie exterior de una pieza , en particular de un componente del motor , por ejemplo de una biela , de las zonas […]
Método y sistema para inspeccionar una pieza de trabajo, del 18 de Marzo de 2020, de THE BOEING COMPANY: Un método para inspeccionar una pieza de trabajo , comprendiendo dicho método: la introducción de datos del modelo asociado con la pieza de trabajo […]
DISPOSITIVO DE MEDICIÓN DE LONGITUD MORFOLOGICA BASADO EN LA TÉCNICA DE LASER ANGULAR (TLA) Y METODO ASOCIADO CON EL MISMO, del 23 de Enero de 2020, de UNIVERSIDAD CES: La presente invención se refiere a un dispositivo para llevar a cabo un proceso de medición de longitudes morfológicas mediante el uso de una […]
Sistema y método para transportar recipientes de muestras, del 25 de Diciembre de 2019, de BECKMAN COULTER, INC.: Sistema para transportar recipientes de muestras que comprende: una unidad de gestor que comprende una zona de distribución y uno o más […]
Máquina de medición y de clasificación de piezas de ensamblaje del tipo remaches con cabezas fresadas, del 13 de Noviembre de 2019, de Stelia Aerospace: Máquina de medición y de clasificación de piezas de ensamblaje, del tipo remaches con cabeza fresada, que comprenden cada una una cabeza […]
Dispositivo optoelectrónico, del 6 de Noviembre de 2019, de VISHAY SEMICONDUCTOR GMBH: Dispositivo sensor optoelectrónico con: al menos un emisor optoelectrónico y al menos un receptor optoelectrónico , un medio de almacenamiento […]