SISTEMA PARA CONTROLAR LA OPERACIÓN DE UNA AERONAVE CONVERTIBLE ENTRE MODOS HELICÓPTERO, AUTOGIRO Y AVIÓN.
Sistema para controlar la operación de una aeronave convertible entre modos helicóptero,
autogiro y avión.
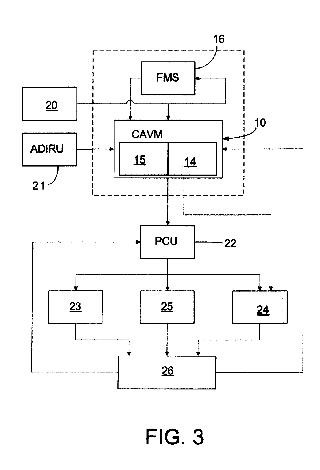
Sistema para controlar la operación de una aeronave convertible (1) entre modos helicóptero, autogiro y avión. El sistema está dotado de un control de vuelo activo "multimodo" (CAVM) (10), que comprende un dispositivo de control de configuración (14), que recibe información de los sensores (26) de todas y cada una de las superficies de control (23) y potencia (24), y sobre la posición de los órganos de mando (20); un selector del modo de vuelo (16) (FMS), para modificar el modo de vuelo si se verifica ciertas condiciones captadas por dichos sensores (26), que informa al piloto sobre sí se verifican las condiciones seguras para un cambio de modo; y un computador (15), que tiene como entradas las instrucciones dadas por el piloto y los datos de las superficies de control (23), de potencia (24) y del ADIRU (21), y que envía a la PCU (22) la orden de cuáles superficies de control y cuáles módulos de potencia deben ser accionados.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P200802937.
Solicitante: SOLER CANELA, HERIBERT.
Nacionalidad solicitante: España.
Inventor/es: SOLER CANELA,HERIBERT, FERRER RULLAN,RAMON.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B64C27/24 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B64 AERONAVES; AVIACION; ASTRONAUTICA. › B64C AEROPLANOS; HELICOPTEROS (vehículos de colchón de aire B60V). › B64C 27/00 Giroaviones; Sus rotores específicos (dispositivos de aterrizaje B64C 25/00). › con la palas del rotor fijas en vuelo de forma que actúen como superficies de sustentación.
- B64C27/26 B64C 27/00 […] › caracterizados por estar dotados de alas fijas.
- G05D1/08 FISICA. › G05 CONTROL; REGULACION. › G05D SISTEMAS DE CONTROL O DE REGULACION DE VARIABLES NO ELECTRICAS (para la colada continua de metales B22D 11/16; dispositivos obturadores en sí F16K; evaluación de variables no eléctricas, ver las subclases apropiadas de G01; para la regulación de variables eléctricas o magnéticas G05F). › G05D 1/00 Control de la posición, del rumbo, de la altitud o de la actitud de vehículos terrestres, acuáticos, aéreos o espaciales, p. ej. piloto automático (sistemas de radionavegación o sistemas análogos que utilizan otras ondas G01S). › Control de la actitud, es decir, eliminación o reducción de los efectos del balanceo, cabeceo o guiñada.
Fragmento de la descripción:
Sistema para controlar la operación de una aeronave convertible entre modos helicóptero, autogiro y avión.
Sector técnico de la invención
La presente invención se refiere a un sistema para controlar la operación de una aeronave convertible entre modos helicóptero, autogiro y avión, según el preámbulo de la reivindicación 1.
Antecedentes de la invención
El documento EP1731420 describe un método de operación de una aeronave convertible, dotada de un fuselaje, unas alas fijas convencionales provistas de alerones, una cola con timones, motores propulsores, un rotor de palas, una transmisión entre los motores y el rotor, equipada con medios de freno y embrague, y un tren de aterrizaje. El método comprende una transición directa e inversa de modo helicóptero a modo autogiro y una transición directa e inversa de modo autogiro-helicóptero a modo avión.
La patente ES2277476 describe un rotor para aeronave convertible entre modos alas giratorias a modo avión que permite la implementación del método de la EP1731420. El rotor es accionado por motores propulsores de la propia aeronave a través de una transmisión de par, basada en juntas cardan, provista de medios de embrague y freno del rotor, y con medios de control del cabeceo y alabeo del árbol de rotación del rotor.
Típicamente, las aeronaves están provistas de un sistema de control de vuelo, que comprende:
- órganos de mando en cabina, tales como joysticks, pedales, palancas de potencia, etc., desde los que se suministran órdenes de mando al control activo de vuelo;
- un ADIRU (ó Air Data and Inertial Unit), para la adquisición de datos inerciales (dinámicas de la aeronave) y condiciones del aire (presión dinámica) en que se desenvuelve la aeronave;
- una unidad de control de potencia (PCU), que recibe la señal del control activo de vuelo (CAV), y que se encarga de calcular las consignas para las superficies de control (flaps, timones, etc.) y los módulos de potencia (motores y turbinas de propulsión y giro);
- un conjunto de actuadores, que actúan en función de la salida de la PCU sobre dichas superficies de control y módulos de potencia; y
- un conjunto de sensores para captar el estado de las superficies de control y los módulos de potencia.
En lo que sigue se emplearán indistintamente tanto los acrónimos anteriores como sus expresiones originales enteras, toda vez que en la industria aeronáutica y en aviónica son muy profusamente empleados los acrónimos, y un experto en la técnica está muy habituado a su utilización.
Las patentes citadas más arriba no describen ni sugieren el modo en que estos sistemas de control activo de vuelo se deben adaptar a sus particulares características, en concreto derivadas de que describen aeronaves convertibles entre modo avión, modo autogiro y modo helicóptero.
La finalidad de la presente invención es proporcionar un sistema de control activo de vuelo para aeronaves convertibles entre modo avión, modo autogiro y modo helicóptero, que permita simplificar y unificar los instrumentos y mandos de vuelo y su distribución en la cabina (cockpit) de forma que permita una operación simple, ergonómica y, sobre todo, segura.
Explicación de la invención
A tal finalidad, el objeto de la presente invención es un sistema para controlar la operación de una aeronave convertible entre modos helicóptero, autogiro y avión, de nuevo concepto y funcionalidad, que se caracteriza, según la parte caracterizante de la reivindicación 1, porque comprende un control de vuelo activo "multimodo" (CAVM), el cual comprende a su vez:
- un dispositivo de control de configuración, que recibe información de los sensores de todas y cada una de las superficies de control y potencia, y sobre la posición de los órganos de mando;
- un selector del modo de vuelo, para modificar el modo de vuelo si se verifica ciertas condiciones captadas por dichos sensores, que informa al piloto sobre si se verifican las condiciones seguras para un cambio de modo; y
- un computador, que tiene como entradas las instrucciones dadas por el piloto y los datos de las superficies de control, de potencia y del ADIRU, y que envía a la PCU la orden de cuáles superficies de control y cuáles módulos de potencia deben ser accionados.
En las reivindicaciones 2 y siguientes se describen modos de realización preferentes de la presente invención.
Breve descripción de los dibujos
A continuación se hará la descripción detallada de una forma de realización preferida, aunque no exclusivas, del sistema para controlar la operación de una aeronave convertible entre modos helicóptero, autogiro y avión, objeto de la invención, para cuya mejor comprensión se acompaña de unos dibujos en los cuales se ilustra a modo de ejemplo no limitativo, formas de realización de la presente invención. En dichos dibujos:
La Fig. 1, es una vista en alzado lateral de una aeronave convertible que se gestiona según el sistema para controlar la operación de acuerdo con la presente invención, con las palas del rotor desplegadas para funcionamiento en modos alas giratorias (autogiro o helicóptero);
La Fig. 2 es una vista en planta superior de la aeronave de la Fig. 1.
La Fig. 3 es un diagrama de bloques funcional que ilustra el modo operativo del sistema para controlar la operación de la aeronave convertible según la presente invención;
La Fig. 4 es un diagrama de flujo que ilustran una forma de realización de la gestión de las transiciones entre los modos de operación helicóptero, autogiro y avión; y
La Fig. 5 es una vista análoga de la Fig. 2, de la aeronave de la Fig. 2, pero con las palas del rotor rotadas y desplegadas hacia popa, para funcionamiento en modo avión de alas fijas.
Descripción detallada de los dibujos
En las Figs. 1, 2 y 5 pueden apreciarse que la aeronave convertible 1 a que se aplica el sistema de control de vuelo de la invención es una aeronave híbrida entre un helicóptero, un autogiro y un avión de alas fijas. La aeronave convertible 1 comprende un fuselaje 2, unas alas fijas 3 convencionales dotada de alerones, una cola 4 convencional con timones, motores propulsores 5, un rotor 6 de palas 7, 8, una transmisión entre los motores propulsores 5 y el rotor 6, equipada con medios de freno y embrague del rotor 6, un tren de aterrizaje, unos medios de transición de modo helicóptero a modo autogiro y viceversa, unos medios de transición directa e inversa de modo autogiro-helicóptero a modo avión, que se describen más adelante, y medios de presurización y calefacción de la cabina ("cockpit").
En una forma de realización, la aeronave convertible 1 ilustrada en los dibujos es un aparato con dos motores propulsores 5 que mueven dos hélices 11 de paso variable. El paso de las hélices 11 puede llegar a ser negativo. Además, los motores propulsores 5 están conectados al rotor 6 por medio de una transmisión equipada con freno y embrague.
Para medir la velocidad de la aeronave se emplea habitualmente el nudo o la milla náutica, expresada en el Sistema Internacional de Unidades, siendo su conversión la siguiente: 1 nudo es igual a 1 milla náutica por hora ó 1.852,00 m/h (Sistema Internacional de Unidades).
La sustentación para un rango de velocidades "negativas" o bajas (típicamente entre 0 y unos 185,2 Km./h), se produce por medio del rotor 6, cuyo eje de rotación se ha representado con la referencia numérica 19, y la aeronave convertible 1 opera en modo alas giratorias, es decir en modo helicóptero o modo autogiro, en tanto que para velocidades superiores la sustentación se realiza a través de las alas fijas 3, para un vuelo en modo avión o alas fijas. La sustentación también puede producirse, para un determinado rango de velocidades intermedias, mediante las alas 3 y el rotor 6 en modo autogiro, simultáneamente.
La aeronave convertible 1 de la invención puede despegar y aterrizar en "alas giratorias", es decir tanto en modo autogiro como en modo helicóptero, con los motores propulsores 5 embragados al rotor 6, y la transición directa o inversa a modo avión puede llevarse a cabo tanto a partir de modo helicóptero como a partir de modo autogiro.
Por ejemplo, la aeronave puede despegar en modo helicóptero, y operar en este modo para valores de velocidad VNO (velocidad normal de operación) comprendidos...
Reivindicaciones:
1. Sistema para controlar la operación de una aeronave convertible (1) entre modos helicóptero, autogiro y avión, que comprende:
- órganos de mando en cabina, tales como joysticks, pedales, palancas de potencia, etc., desde los que se suministran órdenes de mando al control activo de vuelo;
- un ADIRU (Air Data and Inertial Unit) (21), para la adquisición de datos inerciales dinámicas de la aeronave (1) y condiciones del aire (presión dinámica) en que se desenvuelve la aeronave;
- una unidad de control de potencia (PCU) (22), que recibe la señal del CAVM (10), y que se encarga de calcular las consignas de mando para las superficies de control (flaps, timones, aerofrenos, slats, compensador, tren de aterrizaje, etc.) y para los módulos de potencia (motores (5), rotor (6), paso colectivo de las palas (7, 8));
- un conjunto de actuadores, que actúan en función de la salida de la PCU (22) sobre dichas superficies de control (23) y módulos de potencia (24); y
- un conjunto de sensores (26) para captar el estado de las superficies de control y lo módulos de potencia;
caracterizado porque el sistema está dotado de un control de vuelo activo "multimodo" (CAVM) (10), que comprende:
- un dispositivo de control de configuración (14), que recibe información de los sensores (26) de todas y cada una de las superficies de control (23) y potencia (24), y sobre la posición de los órganos de mando (20);
- un selector del modo de vuelo (16) (FMS), para modificar el modo de vuelo si se verifica ciertas condiciones captadas por dichos sensores (26), que informa al piloto sobre si se verifican las condiciones seguras para un cambio de modo; y
- un computador (15), que tiene como entradas las instrucciones dadas por el piloto y los datos de las superficies de control (23), de potencia (24) y del ADIRU (21), y que envía a la PCU (22) la orden de cuáles superficies de control y cuáles módulos de potencia deben ser accionados.
2. Sistema para controlar la operación de una aeronave convertible, según la reivindicación 1, caracterizado porque comprende un módulo de potencia (24), que responde a la orden que le llega de la Unidad de Control Activo de Vuelo Multimodo CAVM (10), para el control de la velocidad de rotación de los órganos rotativos (5, 6, 11), de los pares y de los pasos de las hélices (11) y colectivo del rotor (6), que integra uno o varios sistemas de control seleccionados del grupo:
sistema de control del paso colectivo del rotor (6),
sistema de control de potencia con ajuste electrónico de combustible y aire, sistema automático de control de paso de hélice (11),
sistema automático de control del torque (RPM motor - RPM rotor-Colectivo), y
sistema de control de guiñada.
3. Sistema para controlar la operación de una aeronave convertible, según la reivindicación 1, caracterizado porque el CAVM (10) comprende al menos una memoria con una base de datos que contiene las envolventes y configuraciones de vuelo y sus correspondientes transiciones.
4. Sistema para controlar la operación de una aeronave convertible, según la reivindicación 1, caracterizado porque el selector del modo de vuelo FMS (16) comprende medios para informar al piloto de si se cumplen las condiciones de transición entre los modos, helicóptero, autogiro o avión, y para permitir la transición sólo cuando el piloto da la orden.
5. Sistema para controlar la operación de una aeronave convertible, según la reivindicación 4, caracterizado porque dichos medios para informar comprenden una consola dispuesta en el puesto de pilotaje que mediante pulsadores luminosos indica al piloto el modo de vuelo presente y si se dan las condiciones de "transición segura" de un modo de vuelo a otro.
6. Sistema para controlar la operación de una aeronave convertible, según la reivindicación 1, caracterizado porque comprende un tablero con un selector de modo de vuelo de tres posiciones (helicóptero, autogiro o avión), y al menos un joystick para pasar instrucciones de comando a las superficies de control (23) y a los sistemas de control del módulos de potencia (24) en función del modo seleccionado.
7. Sistema para controlar la operación de una aeronave convertible, según la reivindicación 1, caracterizado porque dichos órganos de mando en cabina comprenden al menos un joystick, al menos dos pedales, y al menos una palanca de potencia, cuyos controles sobre los actuadores de las superficies de control y del módulo de potencia a través del CAVM (10) difieren según el modo presente de la aeronave (1).
8. Sistema para controlar la operación de una aeronave convertible, según la reivindicación 7, caracterizado porque el joystick está adaptado para controlar, en modo avión, la velocidad y actitud de la aeronave (1), a través de la actuación del timón de profundidad y de las superficies de alabeo (alerones, flaps, spoilers, etc.).
9. Sistema para controlar la operación de una aeronave convertible, según la reivindicación 7, caracterizado porque el joystick está adaptado para controlar, en modo helicóptero y en modo autogiro, el paso cíclico del rotor (6) para conseguir el momento de cabeceo deseado, y el paso cíclico para conseguir el alabeo deseado.
10. Sistema para controlar la operación de una aeronave convertible, según la reivindicación 9, caracterizado porque el joystick está adaptado para controlar, en modo autogiro, también las superficies de mando correspondientes a alas fijas.
11. Sistema para controlar la operación de una aeronave convertible, según la reivindicación 7, caracterizado porque dichos pedales, en modo avión, actúan sobre el timón de dirección, para mantener una guiñada neutral en todo momento, hasta que el piloto no actúe sobre los pedales, en ese momento el sistema actúa sobre el timón de dirección para permitir la guiñada ordenada por el piloto.
12. Sistema para controlar la operación de una aeronave convertible, según la reivindicación 7, caracterizado porque dichos pedales, en modo helicóptero, actúan sobre el eventual rotor de cola o las plantas de potencian (conjunto motor (5), hélices (11)), para crear la asimetría necesaria para compensar el par de giro del rotor (6), manteniendo una guiñada neutral hasta que el piloto no actúe sobre los pedales, en ese momento el sistema actúa sobre las plantas de potencia o el eventualmente presente rotor de cola para permitir la guiñada ordenada por el piloto.
13. Sistema para controlar la operación de una aeronave convertible, según la reivindicación 7, caracterizado porque dichos pedales, en modo autogiro, actúan sobre el eventual rotor de cola, o el timón de dirección, o las plantas de potencian (conjunto motor, hélice), para crear la asimetría necesaria para compensar el par de giro del rotor, manteniendo una guiñada neutral hasta que el piloto no actúe sobre los pedales, en ese momento el sistema actúa sobre las plantas de potencia o el eventualmente presente rotor de cola para permitir la guiñada ordenada por el piloto.
14. Sistema para controlar la operación de una aeronave convertible, según la reivindicación 7, caracterizado porque dicha palanca de potencia está adaptada para controlar el conjunto motor (5)-hélices (1)-rotor (6), mediante regulación de la relación de RPM, paso de la hélice, colectivo, y par.
15. Sistema para controlar la operación de una aeronave convertible, según la reivindicación 14, caracterizado porque dicha palanca de potencia está adaptada para controlar, en modo helicóptero, el colectivo, y la potencia aplicada al eje (19) del rotor (6) y mantener el par y las rpm del motor (5) y del rotor (6), de forma que, al desplazar la palanca hacia adelante aumenta el paso colectivo de las palas (7, 8) del rotor (6), y la potencia aplicada al eje (19) del rotor (6), y mantiene el torque (rpm motor - rpm rotor) dentro de límites, y al desplazar la palanca hacia tras disminuye dicho paso colectivo y la potencia aplicada al eje (19) del rotor (6), y mantiene el torque (rpm motor - rpm rotor) dentro de límites.
16. Sistema para controlar la operación de una aeronave convertible, según la reivindicación 14, caracterizado porque dicha palanca de potencia está adaptada para controlar, en modo autogiro, el paso colectivo del rotor (6) y la potencia del motor (5), de forma que, al desplazar la palanca hacia delante el sistema actúa sobre el colectivo e incrementa la potencia del motor, y al desplazar la palanca hacia detrás el sistema actúa sobre el colectivo y disminuye la potencia del motor.
17. Sistema para controlar la operación de una aeronave convertible, según la reivindicación 16, caracterizado porque la palanca está adaptada para que, cuando es accionada, el sistema ajusta el paso de las hélices (11) para dar el mejor rendimiento según la velocidad aerodinámica de la aeronave (1).
Patentes similares o relacionadas:
Procedimiento para amortiguar el movimiento de balanceo de un vehículo acuático, del 11 de Marzo de 2020, de SCHOTTEL GMBH: Procedimiento para amortiguar el movimiento de balanceo de un vehículo acuático alrededor del eje longitudinal (L) del mismo, en el que el vehículo acuático presenta […]
Procedimiento para la compensación del bloqueo de una pala de timón en un timón en forma de X, del 4 de Marzo de 2020, de ThyssenKrupp Marine Systems GmbH: Procedimiento para la compensación del bloqueo de una pala de timón en un timón en forma de X de un submarino, en donde el procedimiento exhibe las siguientes etapas: […]
Guía de aproximación de director de vuelo, del 6 de Noviembre de 2019, de THE BOEING COMPANY: Un método implementado por ordenador para proporcionar guiado durante una maniobra de aproximación de un avión , comprendiendo el método: determinar una […]
Filtro de Kalman modificado para la generación de correcciones de error de actitud, del 5 de Junio de 2019, de THE BOEING COMPANY: Medio de almacenamiento legible por ordenador que comprende instrucciones ejecutables por ordenador que, cuando se ejecutan por un ordenador , provocan que el ordenador: […]
Sistema de formación de imágenes espaciales en tres dimensiones, del 3 de Junio de 2019, de THALES: Sistema de formación de imágenes espaciales en tres dimensiones que comprende: - al menos dos satélites (Sat1, Sat2) en órbita geocéntrica en un mismo […]
 Método y aparato para la detección y gestión de fallos latentes para sistemas de control de vuelo por cable, del 29 de Mayo de 2019, de THE BOEING COMPANY: Sistema de control de aeronave que comprende:
sistemas de control de vuelo de piloto y copiloto (P, A), incluyendo cada uno un primer […]
Método y aparato para la detección y gestión de fallos latentes para sistemas de control de vuelo por cable, del 29 de Mayo de 2019, de THE BOEING COMPANY: Sistema de control de aeronave que comprende:
sistemas de control de vuelo de piloto y copiloto (P, A), incluyendo cada uno un primer […]
Métodos y aparatos de notificación de una asimetría de vuelo que influye en una aeronave, del 15 de Mayo de 2019, de THE BOEING COMPANY: Un método, que comprende: monitorizar una característica de balanceo de una aeronave ; determinar una salida de un sistema de piloto automático […]
Piloto automático de vehículo volador, del 24 de Abril de 2019, de THE BOEING COMPANY: Un metodo implementado por ordenador para controlar un vehiculo volador, que comprende: recibir, por un piloto automatico (218A) del vehiculo […]