Sistema de control de estabilidad de vehículo.
Un sistema de estabilidad de un vehículo (100), comprendiendo el sistema:
un sensor de rata de derrape (135) configurado para generar una salida indicativa de una rata de derrape del vehículo;
un sensor de aceleración (140) configurado para generar una salida indicativa de una aceleración lateral del vehículo;
un sensor de dirección (130) configurado para generar una salida indicativa de un ángulo de dirección;
un sensor de solicitud de torque (133) configurado para generar una salida indicativa de una solicitud de torque por un conductor del vehículo;
y un controlador (145) configurado para recibir la salida del sensor de rata de derrape (135), el sensor de aceleración (140), el sensor de dirección (130), y el sensor de solicitud de torque (133), caracterizado porque el controlador está además configurado para calcular un indicador de sobre dirección (335) basado en la salida del sensor de aceleración (140), una velocidad longitudinal del vehículo, y la salida del sensor de la rata de derrape (135), calcular un indicador de sub dirección (330) basado en una rata de derrape de referencia y la salía del sensor de rata de derrape (135)
calcular un indicador de inestabilidad (340) basado en la diferencia entre el indicador de sub dirección (330) y el sensor de sobre dirección (335), modular la solicitud de torque por el conductor basado en el indicador de inestabilidad (340), generar una señal de torque, y transmitir la señal de torque a un diferencial (110, 115).
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/US2006/031952.
Solicitante: ROBERT BOSCH GMBH.
Nacionalidad solicitante: Alemania.
Dirección: POSTFACH 30 02 20 70442 STUTTGART ALEMANIA.
Inventor/es: NARDI,Flavio, KROEHNERT,Michael, JAUCH,Siegfried, SAMSONS,Andris, SCOTT,Vaughan.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B60T8/1755 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B60 VEHICULOS EN GENERAL. › B60T SISTEMAS DE CONTROL DE FRENOS PARA VEHICULOS O PARTES DE ESOS SISTEMAS; SISTEMAS DE CONTROL DE FRENOS O PARTES DE ESOS SISTEMAS, EN GENERAL (control de sistemas de frenado electrodinámico B60L 7/00; control conjugado de frenos y otras unidades de accionamiento de vehículos B60W ); DISPOSICION DE ELEMENTOS DE FRENADO DE VEHICULOS EN GENERAL; DISPOSITIVOS PORTATILES PARA EVITAR EL MOVIMIENTO INDESEADO DE VEHICULOS; MODIFICACIONES REALIZADAS EN VEHICULOS PARA FACILITAR LA REFRIGERACION DE LOS FRENOS. › B60T 8/00 Disposiciones para adaptar la fuerza de frenado sobre la rueda a las condiciones propias del vehículo o al estado del suelo, p. ej. por limitación o variación de la fuerza de frenado (cambiando el número de cilindros de freno en acción en el sistema de frenado B60T 17/10). › Regulación de los frenos especialmente adaptada para el control de la estabilidad del vehículo, p.ej. teniendo en cuenta el ángulo de oscilación o la aceleración transversal al tomar una curva (sistemas de control de la estabilidad dinámica de los vehículos por otra forma que controlando una subunidad particular B60W 30/02).
PDF original: ES-2379285_T3.pdf
Fragmento de la descripción:
Sistema de control de estabilidad de vehículo.
Campo Las realizaciones de la invención se refieren a los sistemas de control de estabilidad de vehículo. Más específicamente, las realizaciones de la invención se refieren a métodos para estabilizar un vehículo utilizando un sistema de control de estabilidad de vehículo.
Antecedentes Existe una variedad de los sistemas de freno-, torque-, y control de estabilidad electrónico basado en transmisión ("ESC") . Un sistema basado en freno puede ser utilizado como un algoritmo ESC para aplicar un frenado variable a todas o alguna de las rudas con el fin de corregir una condición inestable de manejo. Una transmisión controlada electrónicamente puede ajustar la distribución de torque a las ruedas del vehículo para corregir una condición inestable de manejo. La US 2002/153770 A1 se refiere a un aparato de control de comportamiento de vehículo.
Resumen Sin embargo, los sistemas de freno-, torque-, y ESC basados en transmisión son, en general, implementados por separado, y muestran características indeseables que pueden impactar el sentimiento del vehículo al conductor. Por ejemplo, Varios sistemas basados en frenado son efectivos en estabilizar un vehículo, pero no podrán hacerlo con la suavidad deseada. Los sistemas basados en transmisión tienen el potencial de ajustar las dinámicas del vehículo en respuesta a las entradas del conductor, pero son a menudo inefectivas a altas velocidades. Por lo tanto, los sistemas mejorados son deseables.
Los siguientes resúmenes indican ciertos ejemplos de las realizaciones de la invención. No se indican en lo sucesivo para todas las realizaciones y no deben de ninguna forma ser construidos como limitaciones de la invención.
En una realización, se provee un sistema de control de estabilidad integrado que utiliza un control de torque basado en transmisión para cada una de las ruedas del vehículo además de iniciar una función de frenado. Dicho sistema ayuda a mejorar la sensación del sistema de estabilidad al conductor. Tal sistema también ayuda a incrementar la robustez de las dinámicas de manejo, reduciendo la carga de trabajo del conductor, y reduciendo la necesidad del control de estabilidad basado en el frenado. En algunos casos, es deseable aplicar el control e torque antes de aplicar el control de freno.
En otra realización, un sistema de estabilidad del vehículo para un vehículo comprende un sensor de rata de derrape, un sensor de aceleración, un sensor de dirección, un sensor de solicitud de torque, y un controlador. El sensor de rata de derrape es configurado para generar una salida indicativa de la rata de derrape del vehículo. El sensor de aceleración es configurado para generar una salida indicativa de una aceleración lateral del vehículo. El sensor de dirección es configurado para generar una salida indicativa de un ángulo de dirección. El sensor de solicitud de torque está configurado para generar una salida indicativa de una solicitud de torque por el conductor del vehículo. El controlador esta configurado para recibir una salida del sensor de rata de derrape, el sensor de aceleración lateral, el sensor de dirección, y el sensor de solicitud de torque, generan una señal de torque, y transmiten la señal de torque a un diferencial.
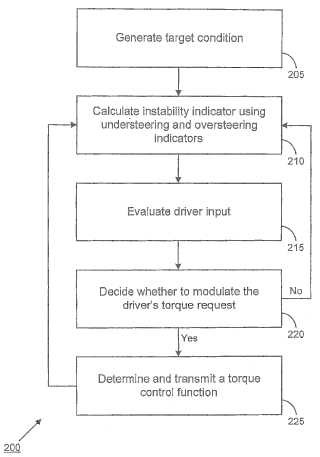
En aun otra realización, un método de estabilizar un vehículo utilizando un sistema de estabilidad de vehículo comprende la generación de un objetivo de indicador de estabilidad, evaluando una entrada del conductor del vehículo, determinando la presencia de una condición de sobre dirección, o ambas, estableciendo un indicador de inestabilidad, determinando un control de torque, y aplicando el control de torque. Aplicando el control de torque puede incluir transmitir una señal de control de torque. El objetivo del indicador de estabilidad representa una condición de vehículo estable. La evaluación de la entrada del conductor del vehículo está basada en al menos parcialmente en una entrada de aceleración y un ángulo de dirección del vehículo. Determinando la presencia de una condición de sub dirección, una condición de sobredirección, o ambas es basada en al menos parcialmente en una aceleración lateral del vehículo, una rada e derrape del vehículo, una velocidad longitudinal del vehículo, y una entrada del conductor del vehículo. Estableciendo un indicador de inestabilidad es basada en si o no existe una condición de sub dirección, una condición de sobre dirección, o ambas. Determinando un control de torque es basado al menos parcialmente en el indicador de inestabilidad, el indicador del objetivo, y la evaluación de entrada del conductor.
En aun otra realización, un vehículo que tiene al menos cuatro ruedas incluyendo una rueda frontal izquierda, una rueda frontal derecha, una rueda trasera izquierda, y una rueda trasera derecha, y teniendo también un sistema de estabilidad de vehículo que incluye una función de frenado y una función de control de torque comprende un sensor de ángulo de dirección de rueda, un sensor de rata de derrape, un sensor de aceleración, al menos un sensor de velocidad de rueda, y un controlados. El sensor de ángulo de dirección esta configurado para detectar un ángulo de dirección del vehículo y generar una señal de dirección indicativa de la misma. El sensor de rata de derrape es configurado para detectar una rata de derrape del vehículo y generar una señal de rata de derrape indicativa de la misma. El sensor de aceleración 2
esta configurado para detectar una aceleración lateral del vehículo y generar una señal de aceleración lateral indicativa de la misma. Al menos un sensor de velocidad de rueda esta configurado para detectar al menos una velocidad de rueda y generar una señal indicativa de señal de rueda de la misma. El controlador está configurado para recibir la señal desde el sensor de ángulo de dirección, la señal del sensor de rata de derrape, la señal del sensor de aceleración, y la señal de al menos un sensor de velocidad de rueda y determinar una corrección de estabilidad. La corrección de estabilidad comprende información para aplicar variablemente un torque a al menos una de la rueda delantera izquierda, la rueda delantera derecha, la rueda trasera izquierda y la rueda trasera derecha utilizando la función de control de torque además de aplicar un freno a al menos una de la rueda delantera izquierda, la rueda delantera derecha, la rueda trasera izquierda y la rueda trasera derecha utilizando la función de frenado.
Otros aspectos de la realización se volverán aparentes en consideración de la descripción detallada y los dibujos acompañantes.
Breve descripción de los dibujos La FIG. 1 ilustra un vehículo teniendo un sistema de control de estabilidad electrónica.
La FIG. 2 ilustra un proceso ejempla que puede ser utilizado para proporcionar el control de estabilidad del vehículo.
La FIG. 3 ilustra una realización de un módulo en sobre dirección o sub dirección.
La FIG. 4 ilustra un proceso ejempla que puede ser utilizado para calcular un indicador de inestabilidad.
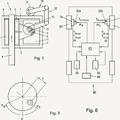
La FIG. 5 ilustra un modelo de bicicleta que puede ser utilizado para llevar a cabo las ecuaciones que describen el comportamiento de un vehículo.
La FIG. 6 ilustra una realización de un módulo de modulación de control de torque.
La FIG. 7 ilustra un proceso de ejemplo que puede ser utilizado para determinar si se transfiere el control de torque.
La FIG. 8 ilustra una realización de un módulo de salida de torque.
La FIG. 9 ilustra un proceso de ejemplo que puede ser utilizado para determinar una cantidad de torque que es aplicado por el módulo de salida de torque.
La FIG. 10 ilustra un proceso de ejemplo en el cual el control de frenado puede ser aplicado después de aplicar el control de torque.
La FIG. 11 ilustra un sistema de control de estabilidad de vehículo de ejemplo.
Descripción detallada Antes de que cualquiera de las realizaciones de la invención sean explicadas en detalle, debe entenderse que la invención no está limitada en su aplicación a los detalles de construcción y la organización e los componentes establecidos en la siguiente descripción o ilustración en los siguientes dibujos. La invención es capaz de otras realizaciones y de ser practicada o llevada a cabo de varias formas. También, se entiende que la fraseología y terminología utilizada acá es para el propósito de descripción y no debería ser... [Seguir leyendo]
Reivindicaciones:
1. Un sistema de estabilidad de un vehículo (100) , comprendiendo el sistema:
un sensor de rata de derrape (135) configurado para generar una salida indicativa de una rata de derrape del vehículo;
un sensor de aceleración (140) configurado para generar una salida indicativa de una aceleración lateral del vehículo;
un sensor de dirección (130) configurado para generar una salida indicativa de un ángulo de dirección;
un sensor de solicitud de torque (133) configurado para generar una salida indicativa de una solicitud de torque por un conductor del vehículo; y un controlador (145) configurado para recibir la salida del sensor de rata de derrape (135) , el sensor de aceleración (140) , el sensor de dirección (130) , y el sensor de solicitud de torque (133) , caracterizado porque el controlador está además configurado para calcular un indicador de sobre dirección (335) basado en la salida del sensor de aceleración (140) , una velocidad longitudinal del vehículo, y la salida del sensor de la rata de derrape (135) , calcular un indicador de sub dirección (330) basado en una rata de derrape de referencia y la salía del sensor de rata de derrape (135)
calcular un indicador de inestabilidad (340) basado en la diferencia entre el indicador de sub dirección (330) y el sensor de sobre dirección (335) , modular la solicitud de torque por el conductor basado en el indicador de inestabilidad (340) , generar una señal de torque, y transmitir la señal de torque a un diferencial (110, 115) .
2. El sistema de estabilidad del vehículo de la reivindicación 1, donde el sensor de la rata de derrape (135) y el sensor de aceleración (140) son combinados en un solo módulo.
3. El sistema e estabilidad del vehículo de la reivindicación 1, que además comprende un bus del vehículo (160) operable para transferir las salidas desde los sensores a otros componentes del vehículo.
4. El sistema de estabilidad del vehículo de la reivindicación 1, donde el controlador (145) está configurado para transmitir una señal de frenado a un sistema de frenado además de transmitir una señal de torque.
5. El sistema de estabilidad del vehículo de la reivindicación 1, donde el controlador (145) está configurado para generar múltiples señales de torque para transmitirlas a múltiples diferenciales (110, 115) .
6. Un sistema de estabilidad de vehículo de la reivindicación 1, donde la salida del sensor de aceleración (140) es ajustada para compensar las condiciones de peralte de la superficie.
7. Un método de estabilización de un vehículo utilizando un sistema de estabilidad, el método comprende:
generar un indicador de objetivo, el indicador de objetivo representa una condición estable del vehículo (paso 205) ; evaluar una solicitud de torque por el conductor, la evaluación basada al menos parcialmente en una solicitud de aceleración y un ángulo de banqueo del vehículo (paso 215) ; caracterizado porque el método además comprende calcular un indicador de sobre dirección basado en una salida del sensor de aceleración lateral, una velocidad longitudinal del vehículo, y una salida del sensor de la rata de derrape (paso 210) ; calcular un indicador de sub dirección basado en una rata de derrape de referencia y la salida del sensor de la rata de derrape (paso 210) ; establecer un indicador de inestabilidad basado en una diferencia entre el indicador de sub dirección y el indicador de sobre dirección (paso 210) ; determinar un control de torque basado al menos parcialmente en el indicador de inestabilidad, el indicador de objetivo, y la solicitud de torque por el conductor (paso 225) ; y aplicar el control de torque (paso 225) .
8. El método de la reivindicación 7, que además comprende aplicar un control de freno que incluye evaluar una condición de frenado (paso 220) .
9. El método de la reivindicación 8, donde la aplicación del control de freno ocurre después de determinar si existe una condición de inestabilidad (paso 220) .
10. El método de la reivindicación 7, donde la rata de derrape de deferencia está basada en una evaluación de la rata de derrape deseada del conductor del vehículo (paso 215) .
11. El método de la reivindicación 7, donde la aplicación del control de torque comprende aplicar variablemente un torque a cada rueda impulsada del vehículo (paso 225) .
12. El método de la reivindicación 7, donde la generación del indicador de objetivo comprende generar un ángulo de patinaje objetivo para el vehículo (paso 205) .
13. El método de la reivindicación 7, que además comprende determinar una condición de frenado basada en al menos una de la velocidad del vehículo y la aceleración lateral del vehículo (paso 220) .
14. Un método de la reivindicación 7, que además comprende decidir implementar el control de torque basado en un conjunto e condiciones de entrada y un conjunto de condiciones de salida (paso 220) .
15. El método de la reivindicación 14, donde las condiciones de entrada y salida son determinadas al menos parcialmente cuando el indicador de inestabilidad pasa un umbral (paso 220) .
16. Un vehículo (100) que tiene al menos cuatro ruedas incluyendo una rueda frontal izquierda (103) , una rueda frontal derecha (104) , una rueda trasera izquierda (105) , y una rueda trasera izquierda (106) , y que tiene también un sistema de estabilidad del vehículo que incluye una función de frenado y una función de control de torque, comprendiendo el sistema de estabilidad del vehículo:
un sensor de ángulo de dirección (130) configurado para detectar un ángulo de dirección del vehículo y generar una señal de dirección indicativa de la misma; un sensor de rata de derrape (135) configurado para detectar una rata de derrape del vehículo y generar una señal de rata de derrape indicativa de la misma; un sensor de derrape (140) configurado para detectar una aceleración lateral del vehículo y generar una salida indicativa de la misma; al menos un sensor de velocidad de la rueda (125) configurada para detectar la velocidad de al menos una rueda y generar una señal de velocidad de rueda indicativa de la misma; y un controlador (145) configurado para recibir la señal desde el sensor de ángulo de dirección (130) , la señal desde el sensor de rata de derrape (135) , la salida del sensor de aceleración (140) , y la señal del sensor de velocidad de al menos una rueda (125) , caracterizado porque el controlador es además configurado para calcular un indicador de sobre dirección (335) basado en la salida del sensor de aceleración (140) , la señal de la velocidad de la rueda del sensor de velocidad de al menos una rueda (125) , y la señal de la rata de derrape del sensor de rata de derrape (135) , calcular un indicador de sub dirección (330) basado en una rata de referencia de derrape y la señal del sensor de la rata de derrape (135) , y determinar una corrección de estabilidad basada en una diferencia entre el indicador de sub dirección (330) y el indicador de sobre dirección (335) , donde la corrección de estabilidad comprende la información para aplicar un torque variablemente a al menos una entre la rueda delantera izquierda (103) , la rueda delantera derecha (104) , la rueda trasera izquierda (105) , y la rueda trasera derecha (106) utilizando la función de control de torque además de aplicar el freno a al menos una entre la rueda delantera izquierda (103) , la rueda delantera derecha (104) , la rueda trasera izquierda (105) , y la rueda trasera derecha (106) utilizando la función de frenado.
17. El sistema de estabilidad del vehículo de la reivindicación 16, donde el sensor de aceleración (140) y el sensor de la rata de derrape (135) son combinados en un solo módulo de detección.
18. El sistema de estabilidad del vehículo de la reivindicación 16, donde las señales generadas por el sensor del ángulo de dirección (130) , el sensor de rata de derrape (135) , el sensor de aceleración (140) , y al menos un sensor de velocidad de rueda (125) son transmitidos al controlador (145) en un bus del vehículo (160) .
19. El sistema de estabilidad del vehículo de la reivindicación 16, donde el vehículo (100) incluye un diferencial (110, 115) operativo para recibir al menos alguna información desde la corrección de estabilidad del vehículo.
20. El sistema de estabilidad del vehículo de la reivindicación 19, donde un dispositivo de acoplamiento controlado electromecánicamente o electrohidráulicamente (110, 115) es utilizado para aplicar el torque a al menos una entre la rueda delantera izquierda (103) , la rueda delantera derecha (104) , la rueda trasera izquierda (105) , y la rueda trasera derecha (106) .
21. El sistema de estabilidad del vehículo de la reivindicación 20, donde el dispositivo de acoplamiento controlable (110115) es un diferencial del tipo embrague.
22. El sistema de estabilidad del vehículo de la reivindicación 21, donde el vehículo (100) incluye un sistema de frenado operable para recibir al menos alguna información desde la corrección de estabilidad del vehículo.
Patentes similares o relacionadas:
Dispositivo de control de frenado y vehículo del tipo de montar a horcajadas que lo comprende, del 13 de Noviembre de 2019, de YAMAHA HATSUDOKI KABUSHIKI KAISHA: Un dispositivo de control de frenado para un vehículo del tipo de montar a horcajadas que tiene una primera rueda , que comprende: un primer dispositivo […]
 Sistema de freno y procedimiento de frenado para un freno de fricción no lineal de accionamiento eléctrico, del 2 de Enero de 2019, de VE Vienna Engineering Forschungs- und Entwicklungs GmbH: Procedimiento de para accionar un freno de fricción de accionamiento eléctrico con un comportamiento no lineal de fuerza-desplazamiento, […]
Sistema de freno y procedimiento de frenado para un freno de fricción no lineal de accionamiento eléctrico, del 2 de Enero de 2019, de VE Vienna Engineering Forschungs- und Entwicklungs GmbH: Procedimiento de para accionar un freno de fricción de accionamiento eléctrico con un comportamiento no lineal de fuerza-desplazamiento, […]
Procedimiento para advertir al conductor de un vehículo de un riesgo de vuelco y dispositivo de control con esta finalidad, del 13 de Diciembre de 2017, de WABCO GMBH: Procedimiento para advertir al conductor de un vehículo de un riesgo de vuelco del vehículo sobre su eje longitudinal, registrando un dispositivo […]
Dispositivo de control para un sistema de frenado de un vehículo, sistema de frenado para un vehículo y método para operar un sistema de frenado de un vehículo, del 9 de Agosto de 2017, de ROBERT BOSCH GMBH: 1. Dispositivo de control para un sistema de frenado de un vehículo, con un aparato de control , mediante el cual el sistema de […]
Procedimiento de frenado automático de un vehículo automóvil, del 12 de Julio de 2017, de PSA Automobiles SA: Procedimiento de frenado automático de un vehículo automóvil, que pone en práctica una función de gestión de la dinámica longitudinal del vehículo , […]
Dispositivo de control de freno escalonado para reventón de neumático de vehículo y método de control del mismo, del 18 de Enero de 2017, de Zhejiang Geely Automobile Research Institute Co., Ltd: Un dispositivo de control de freno escalonado para reventón de neumático de vehículo, incluyendo un sensor de presión de neumático para detectar un […]
Procedimiento y dispositivo para estabilizar la marcha de un remolque que se mueve a bandazos, del 21 de Septiembre de 2016, de AUDI AG: Procedimiento para estabilizar la marcha de un remolque que se mueve a bandazos arrastrado por un vehículo, en el que se frena automáticamente […]
Procedimiento y sistema de frenado para el control de estabilidad de un vehículo, del 13 de Julio de 2016, de CONTINENTAL TEVES AG & CO. OHG: Procedimiento en el que se regula la estabilidad de conducción de un vehículo, en donde se influye sobre una diferencia de tasa de derrape por medio de un momento […]