SISTEMA ACÚSTICO PARA DETECCIÓN Y LOCALIZACIÓN BASADO EN UN ARRAY VIRTUAL DE GEOMETRIA RECONFIGURABLE MEDIANTE 4 SUBARRAYS MONOSENSOR.
El sistema i) implementa arrays virtuales de un elevado número de sensores,
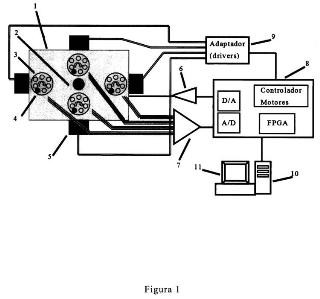
mediante un array físico de 4 sensores y ii) estima la posición espacial de objetos mediante procedimientos acústicos. El sistema está formado por 4 discos circulares giratorios (3) con un micrófono en cada una de ellos (4), un altavoz (2), 4 motores paso a paso que accionan los discos (5), una plataforma base (1) que aloja a los discos, al altavoz y los motores paso a paso, un adaptador (drivers) para los motores paso a paso (9), 4 equipos pre-amplificadores (7) para los micrófonos, un equipo amplificador (6) para el altavoz, un sistema de adquisición y preprocesado (8) compuesta por: microcontrolador, FPGA, 1 módulo de entrada analógica de 4 canales, 1 módulo de salida analógica de 1 canal y un módulo de control de motores paso-paso de 4 canales, un equipo informático (10) y software con algoritmos de procesado necesarios para el funcionamiento del sistema (11).
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201001387.
Solicitante: UNIVERSIDAD DE VALLADOLID.
Nacionalidad solicitante: España.
Inventor/es: IZQUIERDO FUENTE,ALBERTO, JIMÉNEZ GÓMEZ,MARÍA ISABEL, DEL VAL PUENTE,LARA, Raboso Mateos,Mariano.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01S5/20 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 5/00 Establecimiento de la posición mediante la coordinación de dos o más determinaciones de dirección o de líneas de posición; Establecimiento de la posición mediante la coordinación de dos o más determinaciones de distancia. › La posición de la fuente se determina mediante una pluralidad de localizadores de dirección espaciados.
Fragmento de la descripción:
Sistema acústico para detección y localización basado en un array virtual de geometría reconfigurable mediante 4 subarrays monosensor.
Campo de la invención
La presente invención se enmarca principalmente en el campo de los arrays virtuales acústicos, aunque también se engloba tanto en el campo de la acústica como en el de la vigilancia automática de recintos cerrados mediante arrays de sensores.
Estado de la técnica
El término RADAR deriva del acrónimo inglés RAdio Detection and Ranging (detección y medición de distancias por radio). Es un sistema que utiliza ondas electromagnéticas para medir distancias, altitudes, direcciones de objetos estáticos o móviles y también las velocidades de estos últimos. De esta forma, incluso permiten clasificar e identificar objetos (M. Skolnik "Introduction to Radar Systems". Mc Graw-Hill, Singapore, 2001).
Su principio de funcionamiento se basa en la radiación de pulsos electromagnéticos al espacio, y posteriormente en la detección del eco de la señal reflejada por el objeto. Un radar acústico utiliza los mismos principios de funcionamiento, pero trabajando con ondas acústicas que se propagan por el aire, y se suele denominar como SODAR (SOund Detection And Ranging).
Estos sistemas de detección y localización de objetos requieren emplear antenas selectivas que trabajen con haces muy estrechos y elevada ganancia (Antenna Standards committee of the IEEE Antennas and Propagation Society, "IEEE Standard Definitions of Terms for Antennas", IEEE Std. 145-1993).
De hecho, las antenas concentran la energía, recibida y/o transmitida por el sistema, en haces que, al dirigirse hacia un objeto determinado, producen una señal suficientemente potente para realizar la detección, además de eliminar las contribuciones del resto de objetos, interferencias y ruido no deseados (D. Barton, C. Cook, and P. Hamilton, "Radar Evaluation Handbook". Artech House, Boston, 1991).
Un array de antenas es un conjunto de antenas sencillas, que en función de la geometría que adopten y de las excitaciones empleadas para cada uno de sus elementos, permite sintetizar diagramas de radiación específicos.
La conformación de haz es una herramienta de procesado de señal en array que permite dirigir el haz de radiación/emisión del array de forma electrónica. Esta estrategia consiste en ajustar la amplitud y fase de las señales en cada elemento, así como la posición del mismo, para obtener el diagrama de radiación deseado (W. Wirth, "Radar techniques using array antennas". IEE Radar, Sonar, Navigation and Avionics Series 10, London, UK, 2001).
El conformador permite adaptar el diagrama, incluso de forma dinámica, a las condiciones del escenario concreto en el que se esté trabajando. De hecho, la capacidad para determinar y fijar la posición del lóbulo principal y los nulos del diagrama de radiación, así como poder contar con varios haces generados, son características fundamentales que permiten seguir varios objetos de forma simultánea (S. Kingsley and S. Quegan, "Understanding Radar Systems". Mc Graw-Hill, UK, 1992).
Existen múltiples tipos de geometría de array: lineales, planares, esféricos, aleatorios, etc. (N. Fourikis, "Advanced Array Systems, Applications and RF Technologies", Academic Press, 2000).
En todas las geometrías, como regla general, cuánto mayor es el número de sensores, siempre y cuando el espaciado entre sensores cumpla un conjunto específico de restricciones, mejor son las prestaciones del array: resolución angular, nivel de lóbulos secundarios, capacidad de cancelación de interferencias, etc. (A. Gershman, and J. Böhme, "A note on most favorable array geometries for DOA estimation and array interpolation" IEEE Signal Processing Letters, vol. 4, no. 8, pp. 232-235, Agosto 1997).
Un array puede estar constituido internamente por varios subarrays o clusters. El empleo de la agrupación de los sensores en subarrays facilita su procesado y disminuye el número de canales de procesado necesario, etc. Además, también se consigue mejorar las prestaciones del array tales como aumentar su resolución, aumentando la apertura espacial del mismo, y eliminar la aparición de grating lobes, que son lóbulos de amplitud similar al principal, pero en direcciones diferentes a la de interés (M. Zhang, S. Wu and L. Li, "Improving resolution for array processing by new array geometry and spatial filter", IEEE Transactions on Signal Processing, Vol. 42, No. 3, pp. 680-683, Mar. 1994).
El concepto de array virtual, denominado como VAA (Virtual Antenna Array) hace referencia a emular arrays de un elevado número de sensores mediante un array físico con un número de sensores reducido (F. Strömberg, "Virtual Antenna Arrays Results and ongoing studies", PhD, Royal Institute of Technology. Kista, Suecia, 2004).
Los arrays virtuales permiten reducir los costes del equipamiento, como consecuencia de utilizar un número de sensores reducido y por tanto un número de canales de procesado también reducido. Como contrapartida, requieren un aumento en el tiempo de procesado y trabajar con objetos que puedan considerarse estacionarios dentro del tiempo de procesado.
Explicación de la invención
Esta invención consiste en un sistema que permite (i) implementar de forma eficiente y con coste reducido un array con un elevado número de sensores, (ii) detectar objetos mediante procedimientos acústicos, (iii) estimar su posición espacial en tres dimensiones y (iv) ser flexible y reconfigurable para adaptarse al escenario de trabajo.
El array que presenta esta invención consiste en un array planar o bidimensional que sólo tiene implementados a nivel físico 4 micrófonos y por ende 4 canales de procesado, pero que permite reconfigurar, de forma independiente, la posición de cada micrófono, emulando un array virtual con un número elevado de sensores.
La plataforma del array (1) está constituida por un altavoz central (2) que funciona como transmisor, y por un receptor, compuesto de 4 micrófonos, ubicado cada uno de ellos en una disco circular (3), controlada mediante un motor paso a paso (5), que permite posicionar angularmente cada micrófono (4). Los cuatro discos circulares están situadas sobre un mismo plano, centradas sobre los vértices de una estructura rómbica, en cuyo centro geométrico está el altavoz.
En cuanto al funcionamiento, en primer lugar se configura el sistema en función del número de micrófonos virtuales a implementar, calculándose las posiciones angulares para cada disco circular. En base a estas posiciones, se definen cuaternas formadas por las posiciones de cada una de los discos giratorios, de forma que todas las cuaternas tengan posiciones espaciales diferentes.
Se realizan tantos experimentos como cuaternas definidas, y para cada experimento se deberá almacenar la información de las señales recibidas en los cuatro canales de recepción.
Para cada experimento, se transmite a través de un altavoz (2), un burst de pulsos generado digitalmente en una tarjeta de procesado de señal que se convierte al dominio analógico mediante un conversor D/A en el sistema de adquisición y preprocesado (8), y es amplificado (6).
El eco producido por el reflejo de la señal transmitida en los objetos presentes en el espacio de vigilancia se recibe en la plataforma del array de recepción (1). La señal recibida por cada sensor es amplificada (7) y convertida al dominio digital mediante el conversor A/D multicanal del sistema de adquisición y preprocesado (8). Las señales se almacenan en el equipo informático (10).
Una vez realizados todos los experimentos, se inicia en el equipo informático el procesado espacio-temporal que permite la localización del objeto.
Todos los algoritmos necesarios para el funcionamiento del sistema constituyen el software del sistema (11).
Esta invención implementa y desarrolla un sistema de radar acústico, capaz de localizar objetos, mediante un array con un número elevado de sensores, mediante un sistema constituido por 4 micrófonos y sus correspondientes canales de procesado.
Además, las posiciones de los micrófonos son reconfigurables, de modo que se permite...
Reivindicaciones:
1. Sistema acústico para detección y localización, que se basa en un array físico de 4 sensores que emula a un array virtual con un número elevado de sensores, caracterizado por 4 discos circulares giratorios (3) con un micrófono en cada uno de ellos (4), un altavoz (2), 4 motores paso a paso que accionan los discos (5) una plataforma base (1), un adaptador (driver) para los motores paso a paso (9), 4 equipos pre-amplificadores para los micrófonos (7), un equipo amplificador para el altavoz (6), un sistema de adquisición y preprocesado (8) compuesta por: microcontrolador, FPGA, 1 módulo de entrada analógica de 4 canales, 1 módulo de salida analógica de 1 canal y un módulo de control de motores paso-paso de 4 canales, un equipo informático (10) y un software con los algoritmos de procesado necesarios para el funcionamiento del sistema (11).
2. Sistema acústico para detección y localización, según reivindicación 1, caracterizado por un array reconfigurable, que permite definir geometrías del array de forma dinámica.
3. Sistema acústico para detección y localización, según reivindicación 1, caracterizado por tener los centros de los discos giratorios ubicados en los vértices de un rombo y por tener el altavoz situado en el centro geométrico del rombo.
Patentes similares o relacionadas:
Detección de drones, del 1 de Enero de 2020, de SQUAREHEAD TECHNOLOGY AS: Un sistema para la detección, la clasificación y el rastreo de vehículos aéreos no tripulados en una zona de interés, comprendiendo el sistema: al […]
Procedimiento para localizar y combatir amenazas, en especial en situaciones de amenaza asimétricas, del 4 de Diciembre de 2019, de ThyssenKrupp Marine Systems GmbH: Procedimiento para localizar amenazas mediante el uso de un sistema, en donde el sistema es un sistema para localizar amenazas a un buque, en […]
 Estimación de dirección de llegada usando señales de audio con marca de agua y disposiciones ordenadas de micrófono, del 2 de Febrero de 2016, de FRAUNHOFER-GESELLSCHAFT ZUR FORDERUNG DER ANGEWANDTEN FORSCHUNG E.V.: aparato para proveer información de dirección en base a una señal de audio (awm) reproducida con una marca de agua incrustada, que comprende:
un procesador […]
Estimación de dirección de llegada usando señales de audio con marca de agua y disposiciones ordenadas de micrófono, del 2 de Febrero de 2016, de FRAUNHOFER-GESELLSCHAFT ZUR FORDERUNG DER ANGEWANDTEN FORSCHUNG E.V.: aparato para proveer información de dirección en base a una señal de audio (awm) reproducida con una marca de agua incrustada, que comprende:
un procesador […]
PROCEDIMIENTO PARA DETERMINAR LA POSICION DE OBJETOS EN UN EQUIPO CON EL FIN DE PRODUCIR UN CONJUNTO DE OBJETOS CON POSICIONES CONOCIDAS., del 1 de Marzo de 2003, de FAGER, JAN G.: LA INVENCION SE REFIERE A UN EQUIPO QUE TIENE UN TRANSDUCTOR (G) QUE RECIBE UNAS SEÑALES DE UN NUMERO DE OBJETOS CON UNAS POSICIONES DESCONOCIDAS […]
 PROCEDIMIENTO PARA LA DETERMINACION PASIVA DE DATOS DE UN OBJETIVO, del 1 de Mayo de 2008, de ATLAS ELEKTRONIK GMBH: Procedimiento para la determinación pasiva de datos de un objetivo por recepción selectiva en dirección de ondas sonoras que son irradiadas o emitidas […]
PROCEDIMIENTO PARA LA DETERMINACION PASIVA DE DATOS DE UN OBJETIVO, del 1 de Mayo de 2008, de ATLAS ELEKTRONIK GMBH: Procedimiento para la determinación pasiva de datos de un objetivo por recepción selectiva en dirección de ondas sonoras que son irradiadas o emitidas […]
 METODO Y APARATO PARA DETERMINAR UNA FUENTE DE SONIDO, del 16 de Marzo de 2008, de JAPAN SCIENCE AND TECHNOLOGY CORPORATION: Aparato para detectar una fuente de sonido (A, B, C), que comprende: un medio de recogida de sonido que incluye un par de micrófonos de recogida de sonido (11a, 11b) yuxtapuestos […]
METODO Y APARATO PARA DETERMINAR UNA FUENTE DE SONIDO, del 16 de Marzo de 2008, de JAPAN SCIENCE AND TECHNOLOGY CORPORATION: Aparato para detectar una fuente de sonido (A, B, C), que comprende: un medio de recogida de sonido que incluye un par de micrófonos de recogida de sonido (11a, 11b) yuxtapuestos […]
 SISTEMA DE RECONOCIMIENTO PARA DETECTAR OBJETIVOS Y MOVIMIENTOS DE ESTOS, del 16 de Febrero de 2008, de RHEINMETALL WAFFE MUNITION GMBH: Sistema de reconocimiento para detectar objetivos y movimientos de éstos, especialmente movimientos de vehículos, en un territorio objetivo […]
SISTEMA DE RECONOCIMIENTO PARA DETECTAR OBJETIVOS Y MOVIMIENTOS DE ESTOS, del 16 de Febrero de 2008, de RHEINMETALL WAFFE MUNITION GMBH: Sistema de reconocimiento para detectar objetivos y movimientos de éstos, especialmente movimientos de vehículos, en un territorio objetivo […]