PROCEDIMIENTO DE POSICIONADO DE UNA SUPERFICIE RESPECTO DE UNA FUENTELUMINICA MEDIANTE SENSORES.
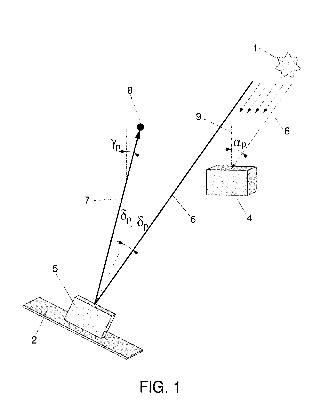
Permite controlar la posición de una superficie reflectante (2) para que la luz reflejada (7) procedente de una fuente de luz (1) incida sobre un punto objetivo (8),
mediante un primer sensor (4) que determina la posición de la fuente de luz (1) respecto de una dirección de referencia (9) y un segundo sensor (5) solidario a la superficie reflectante (2), que determina la posición relativa de dicha superficie reflectante (2) respecto de la fuente de luz (1). Conociendo estas posiciones y la posición relativa de la superficie reflectante (2) respecto del punto objetivo (8), determina el movimiento necesario a aplicar sobre la superficie reflectante (2) para que la luz reflejada (7) incida en el punto objetivo (8).
Se aplica para reflejar la luz solar sobre un colector distante, para iluminar edificios, y en general para cualquier aplicación en la que se requiera direccionar una luz reflejada sobre un punto objetivo (8).
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P200900206.
Solicitante: UNIVERSIDAD DE SEVILLA.
Nacionalidad solicitante: España.
Inventor/es: QUERO REBOUL,JOSE MANUEL.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- F24J2/38
- G05D3/12 FISICA. › G05 CONTROL; REGULACION. › G05D SISTEMAS DE CONTROL O DE REGULACION DE VARIABLES NO ELECTRICAS (para la colada continua de metales B22D 11/16; dispositivos obturadores en sí F16K; evaluación de variables no eléctricas, ver las subclases apropiadas de G01; para la regulación de variables eléctricas o magnéticas G05F). › G05D 3/00 Control de la posición o de la dirección (G05D 1/00 tiene prioridad; control de programa numérico G05B 19/18). › utilizando realimentación.
Fragmento de la descripción:
Procedimiento de posicionado de una superficie respecto de una fuente lumínica mediante sensores.
Objeto de la invención La presente invención se refiere a un procedimiento que permite posicionar una superficie reflectante, montada sobre un dispositivo de posicionamiento, respecto de una fuente lumínica mediante el uso de sensores.
La invención calcula el error existente entre la posición actual del eje perpendicular a la superficie reflectante y la posición teórica que debe tener con objeto de que la luz reflejada incida en un punto definido, denominado punto objetivo. Este error se mide tanto en acimut como elevación, aplicándose el procedimiento en ambos ejes por separado. Para ello se emplea un primer sensor fijo que mide la posición de la fuente lumínica respecto de una dirección de referencia, y un segundo sensor solidario con la superficie que proporciona el ángulo de incidencia de la luz de la fuente lumínica respecto de la perpendicular a la superficie. Por otra parte, se conoce la posición relativa del punto objetivo hacia donde se quiere dirigir la luz reflejada y la posición relativa del centro de giro de la superficie reflectante y la dirección de referencia; de manera que mediante un cálculo geométrico se obtiene el error y la actuación para posicionar correctamente la superficie reflectante.
En general, la invención es aplicable para efectuar el posicionado de una superficie reflectante respecto de una fuente lumínica, y más concretamente para efectuar dicho posicionado respecto del sol, de forma que la invención tiene aplicación directa en el caso de heliostatos, elementos reflectivos y colectores solares en los sistemas solares de generación de energía, y también es útil para sistemas de iluminación indirecta empleando la luz reflejada del sol.
Estado de la técnica Actualmente, el problema de posicionamiento de una superficie reflectante está en auge debido a que su uso es imprescindible en las plantas solares de concentración, que emplean espejos, denominados heliostatos, que reflejan la luz solar sobre un colector distante incluso a centenares de metros. La posición donde debe incidir la luz reflejada debe precisarse con un error del orden de decímetro. Por ello, la exactitud con la que debe posicionarse el espejo respecto del sol debe ser muy elevada. Los heliostatos empleados en estas plantas hacen uso de un sistema de posicionamiento basado en un posicionador de dos ejes, accionados por sendos motores con elevado grado de reducción. Un sensor angular tipo codificador angular determina el ángulo girado por cada eje respecto de una posición inicial. También se conoce la posición del sol a partir de un conjunto de ecuaciones, denominadas almanaque solar, que deben ser evaluadas con una periodicidad inferior a los 20 segundos. Conocidas la posición del concentrador la del sol y la relativa del heliostato, se puede calcular el error cometido y la consiguiente acción de control sobre los motores.
La posición inicial se determina mediante un sensor que al igual que el sensor angular deben de ser de elevada precisión para cumplir los requerimientos de puntería anteriormente mencionados. Asimismo, la estructura que soporta el espejo y el sistema de posicionamiento deben ser lo suficientemente robustos como para soportar el espejo y el esfuerzo que ejerce el viento sobre él, y además estar muy ajustados para reducir las tolerancias de su actuación. Por último, la carga computacional de cálculo de la posición es elevada, precisando el uso de un microprocesador de elevadas prestaciones. Por ello se precisa de un sistema que simplifique la estructura, los sensores y el cálculo con objeto de abaratar los costes de fabricación del heliostato.
En la patente española con número de solicitud P-200800999 se enseña el uso de un sensor que determina el ángulo de incidencia de la luz con elevada precisión. El sensor se posiciona inicialmente de manera que la luz reflejada por la superficie incida en éste con un ángulo de 00 en acimut y elevación cuando la luz incide en el foco objetivo. De esta manera se cierra el bucle de control, realimentando el error cometido directamente a partir de la luz reflejada, permitiendo abaratar los costes de fabricación, puesto que se elimina el uso de sensores angulares y de posición inicial y además se compensan los errores mecánicos generados por al estructura y perturbaciones externas como la del viento. Pero el uso de este sensor en la luz reflejada tiene el inconveniente de una instalación costosa, pues precisa de una estructura auxiliar que lo soporte frente al espejo, haciendo esta solución inviable para heliostatos de gran superficie.
Mediante la invención se permite controlar la posición del espejo con la ayuda de dos sensores. Uno que determina la posición del sol respecto a una superficie de referencia y otro solidario al espejo, que determina la posición relativa del mismo respecto del sol. Computando estos ángulos y conociendo la posición relativa del heliostato respecto del concentrador, se puede determinar el movimiento necesario para reflejar la luz en el punto adecuado. Esta solución evita tener que emplear estructuras auxiliares frente a los heliostatos para soportar los sensores, facilitando su uso, abaratando los costes de instalación y mantenimiento. La inclusión de un circuito microprocesador permite un montaje autónomo de los heliostatos, pues todo el control se realiza localmente.
Descripción de la invención Para conseguir los objetivos y resolver los inconvenientes anteriormente indicados, la invención ha desarrollado un nuevo procedimiento de posicionado de una superficie respecto de una fuente lumínica mediante sensores, que permite posicionar una superficie reflectante respecto de una fuente lumínica para que la luz reflejada por la superficie reflectante incida en un punto objetivo de posición conocida, mediante la actuación de un dispositivo electromecánico con dos ejes de giro en acimut y elevación.
El procedimiento de la invención se caracteriza porque en primer lugar comprende hacer incidir el haz reflejado por la superficie reflectante sobre el punto objetivo, para a continuación medir, mediante un primer sensor situado en una posición fija, un primer ángulo en acimut y un primer ángulo en elevación que forma el haz de luz incidente sobre el primer sensor respecto de una dirección de referencia, para a continuación determinar un segundo ángulo en acimut y un segundo ángulo en elevación invariables y conocidos que forma el haz reflejado sobre la superficie reflectante y que incide sobre el punto objetivo respecto de la dirección de referencia.
A continuación el procedimiento de la invención comprende calcular por geometría un tercer ángulo en acimut y un tercer ángulo en elevación. El tercer ángulo en acimut se calcula a partir del primer y del segundo ángulo en acimut, e igualmente el tercer ángulo en elevación se calcula a partir del primer y del segundo ángulo en elevación. Los terceros ángulos en acimut y elevación se corresponden a los ángulos que forma el haz incidente respecto del eje perpendicular a un segundo sensor solidario de la superficie reflectante en acimut y elevación respectivamente de manera que el tercer ángulo en acimut y elevación puede ser medido por el segundo sensor.
Además el procedimiento de la invención comprende una fase en la que en una posición cualquiera de la superficie reflectante se mide, mediante el segundo sensor, un cuarto ángulo en acimut y un cuarto ángulo en elevación que forma el haz reflejado con el eje perpendicular al segundo sensor. A continuación se compara el tercer ángulo en acimut con el cuarto ángulo en acimut para que en el caso en que exista coincidencia entre el tercer y cuarto ángulo en acimut se mantenga la posición en acimut de la superficie reflectante, y en caso contrario se varíe la posición de la superficie reflectante hasta que coincidan el tercer y cuarto ángulo en acimut. Igualmente se compara el tercer ángulo en elevación con el cuarto ángulo en elevación calculado para que en el caso en el que exista coincidencia entre el tercer ángulo en elevación y el cuarto ángulo en elevación, se mantenga la posición en elevación de la superficie reflectante y en caso contrario se varíe la posición en elevación de la superficie reflectante hasta que coincidan el tercer y cuarto ángulo en elevación. Por consiguiente el procedimiento de la invención se aplica independiente y simultáneamente en acimut y elevación para conseguir el correcto posicionado de la superficie reflectante, de forma que la luz reflejada incida sobre el punto objetivo....
Reivindicaciones:
1. Procedimiento de posicionado de una superficie respecto de una fuente lumínica mediante sensores, que permite posicionar una superficie reflectante (2) respecto de la fuente de luz (1) para que la luz reflejada (7) por la superficie reflectante (2) incida en un punto objeto (8) de posición conocida, mediante la actuación de un dispositivo electromecánico (3) con dos ejes de giro en acimut y elevación; se caracteriza porque comprende:
- hacer incidir la luz reflejada (7) por la superficie reflectante (2) sobre el punto objetivo (8) ;
- medir, mediante un primer sensor (4) situado en una posición fija, un primer ángulo en acimut (αp) y un primer ángulo en elevación (αa) que forma el haz de luz incidente sobre el primer sensor (4) respecto de una dirección de referencia (9) , y determinar un segundo ángulo en acimut (γp) y un segundo ángulo en elevación (γa) invariables y conocidos que forma el haz reflejado (7) sobre la superficie reflectante (2) y que incide sobre el punto objetivo (8) , respecto de la dirección de referencia (9) ;
- calcular por geometría un tercer ángulo en acimut (δp) a partir del primer ángulo en acimut (αp) y del segundo ángulo en acimut (γp) y calcular por geometría un tercer ángulo en elevación (γa) a partir del primer ángulo en elevación (αa) y del segundo ángulo en elevación (γa) , correspondiendo los terceros ángulos en acimut (δp) y en elevación (δa) , a los ángulos que forma el haz incidente (6) respecto del eje perpendicular a un segundo sensor (5) solidario de la superficie reflectante (2) en acimut y elevación respectivamente;
- en una posición cualquiera de la superficie reflectante (2) , medir, mediante el segundo sensor (5) , un cuarto ángulo en acimut (δpe) y un cuarto ángulo en elevación (δae) que forma el haz reflejado (7) con el eje perpendicular al segundo sensor;
- comparar el tercer ángulo en acimut (δp) con el cuarto ángulo en acimut para que en el caso en que exista coincidencia entre el tercer ángulo en acimut (δp) y el cuarto ángulo en acimut (δpe) mantener la posición en acimut de la superficie reflecante (2) , y en caso contrario variar la posición de la superficie reflectante (2) hasta que coincidan el tercer ángulo en acimut (δp) y el cuarto ángulo en acimut (δpe) ; y comparar el tercer ángulo en elevación (δa) con el cuarto ángulo en elevación (δae) para que en el caso en que exista coincidencia entre el tercer ángulo en elevación (δa) y el cuarto ángulo en elevación (δae) , mantener la posición en elevación de la superficie reflectante (2) , y en caso contrario variar la posición en elevación de la superficie reflectante (2) hasta que coincidan el tercer ángulo en elevación (δa) y el cuarto ángulo en elevación (δae) .
2. Procedimiento de posicionado de una superficie respecto de una fuente lumínica mediante sensores, según reivindicación 1, caracterizado porque la fuente de luz es el sol (1) .
3. Procedimiento de posicionado de una superficie respecto de una fuente lumínica mediante sensores, según reivindicación 2, caracterizado porque el primer sensor (4) y el segundo sensor (5) son sensores solares angulares tipo codificador angular de elevada precisión.
4. Procedimiento de posicionado de una superficie respecto de una fuente lumínica mediante sensores, según reivindicación 1, caracterizado porque comprende almacenar el primer ángulo en acimut (αp) , el segundo ángulo en acimut (γp) , y un tercer ángulo en acimut (δp) , así como el primer ángulo en elevación (αa) , segundo ángulo en elevación ( (γa) y el tercer ángulo en elevación (δa) .
5. Procedimiento de posicionado de una superficie respecto de una fuente lumínica mediante sensores, según reivindicación 1, caracterizado porque la dirección de referencia (9) es una dirección perpendicular al eje del primer sensor (4) .
6. Procedimiento de posicionado de una superficie respecto de una fuente lumínica mediante sensores, según reivindicación 1, caracterizado porque el dispositivo electromecánico (3) de gobierno de la posición de la superficie reflectante (2) comprende un circuito de control (3b) que gobierna la posición de medios de posicionado de la superficie reflectante (2) .
7. Procedimiento de posicionado de una superficie respecto de una fuente lumínica mediante sensores, según reivindicación 1, caracterizado porque los medios de posicionado de la superficie reflectante (2) están seleccionados entre motores eléctricos (3a) , actuadores hidráulicos y actuadores neumáticos.
8. Procedimiento de posicionado de una superficie respecto de una fuente lumínica mediante sensores, según reivindicación 1, caracterizado porque la superficie reflectante (2) está seleccionada entre una superficie de geometría plana, parabólica, cilindro-parabólica e hiperbólica.
9. Procedimiento de posicionado de una superficie respecto de una fuente lumínica mediante sensores, según reivindicación 1, caracterizado porque los ejes en acimut y en elevación son cualesquiera ejes que guarden la misma relación que dichos ejes de acimut y elevación.
10. Procedimiento de posicionado de una superficie respecto de una fuente lumínica mediante sensores, según reivindicación 1, caracterizado porque se aplica a la iluminación de edificios.
11. Procedimiento de posicionado de una superficie respecto de una fuente lumínica mediante sensores, según reivindicación 10, caracterizado porque la superficie reflectante (2) se monta sobre la planta superior de un edificio cuya luz se refleja a través de huecos de su estructura.
12. Procedimiento de posicionado de una superficie respecto de una fuente lumínica mediante sensores, según reivindicación 1, caracterizado porque se aplica para reflectar una fuente de luz cualquiera.
Patentes similares o relacionadas:
SISTEMA Y MÉTODO DE ORIENTACIÓN DE PANELES SOLARES, del 22 de Junio de 2017, de VÁZQUEZ PALMA, Martín Gustavo: El presente invento describe un sistema y método para instalar paneles solares que consiste de una estructura soporte ajustable para el panel, […]
SISTEMA DE INCLINACION MULTIPOSICION PARA PANELES SOLARES, del 22 de Junio de 2017, de CISCOMANI DAVILA, Geovani Francesco: E! presente invento describe un Sistema De Inclinación Multiposición Para Paneles Solares que consiste de una estructura soporte con un eje externo que gira sobre un eje […]
DISPOSITIVO DE CALIBRACIÓN DE HELIÓSTATOS Y MÉTODO DE CALIBRACIÓN DE HELIÓSTATOS, del 19 de Junio de 2017, de Mitsubishi Hitachi Power Systems, Ltd: Dispositivo de calibración de helióstatos y método de calibración de helióstatos. Se proporcionan un dispositivo de calibración de helióstatos […]
Seguidor de fuente luminosa, del 10 de Mayo de 2017, de MOSER, MARK K: Aparato para seguir una fuente luminosa (S), que comprende: una columna de soporte ; una plataforma montada de forma giratoria […]
MÉTODO DE CALIBRACIÓN PARA HELIOSTATOS, del 6 de Abril de 2017, de FUNDACION CENER-CIEMAT: Método de calibración para heliostatos que comprende llevar a cabo al menos una búsqueda para visualizar al menos una referencia por medio de un dispositivo de visión […]
Método de calibración para heliostatos, del 3 de Abril de 2017, de FUNDACION CENER-CIEMAT: Método de calibración para heliostatos que comprende llevar a cabo al menos una búsqueda para visualizar al menos una referencia por medio de un dispositivo […]
Estructura solar modular multifuncional, del 29 de Marzo de 2017, de Jerónimo Lopes, Amílcar Luís: Una estructura solar modular multifuncional que puede recoger la energía térmica o fotovoltaica del sol; con una función complementaria de […]
MÉTODO Y SISTEMA PARA LA CALIBRACIÓN DE UNA PLURALIDAD DE HELIOSTATOS EN UNA PLANTA TERMO SOLAR DE CONCENTRACIÓN, del 2 de Enero de 2017, de BCB INFORMATICA Y CONTROL SL: Sistema y método para la calibración de una pluralidad de heliostatos en una planta termosolar de concentración que comprende una pluralidad de heliostatos móviles en azimut […]