Torreta hexápoda comprendiendo unos gatos.
Torreta hexápoda que comprende un zócalo (31), un plato (32) móvil y seis gatos (10-1 a 10-6),
comprendiendocada uno de los gatos (10-1 a 10-6) un cuerpo (11), un pistón (12) móvil en traslación con relación al cuerpo (11) yun vástago (18) unido al pistón (12) para seguir su movimiento de traslación y por medio del cual el gato (10-1 a 10-6) ejerce un esfuerzo, caracterizado porque para cada uno de los gatos (10-1 a 10-6), el vástago (18) está unido alpistón (12) por medio de un enlace de rótula (21) a una primera (19) de sus extremidades (19, 20) y porque cadauno de los gatos (10-1 a 10-6) comprende un segundo enlace (24) de rótula situado en un segundo extremo (20) delvástago (18) y porque los seis gatos (10-1 a 10-6) están fijos al zócalo (31) por su cuerpo (11) y están unidos alplato móvil (32) por medio de su segundo enlace (24-1 a 24-6) de rótula.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E11159723.
Solicitante: Bia.
Nacionalidad solicitante: Francia.
Dirección: Z.A. Les Bourtriers 8 rue de l'Hautil 78700 Conflans Ste Honorine FRANCIA.
Inventor/es: BEN OUEZDOU,Fathi, NAMOUN,Fayçal, SELLAOUTI,RAMZI.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- F15B15/14 MECANICA; ILUMINACION; CALEFACCION; ARMAMENTO; VOLADURA. › F15 DISPOSITIVOS ACCIONADORES POR PRESION DE UN FLUIDO; HIDRAULICA O NEUMATICA EN GENERAL. › F15B SISTEMAS QUE FUNCIONAN POR MEDIO DE FLUIDOS EN GENERAL; DISPOSITIVOS ACCIONADORES POR PRESION DE UN FLUIDO, p. ej. SERVOMOTORES; DETALLES DE LOS SISTEMAS DE FLUIDO A PRESION, NO PREVISTOS EN OTRO LUGAR. › F15B 15/00 Dispositivos accionados por presión de un fluido para desplazar un órgano de una posición a otra; Transmisión asociada con estos dispositivos. › siendo el motor del tipo de cilindro recto.
PDF original: ES-2419379_T3.pdf
Fragmento de la descripción:
Torreta hexápoda comprendiendo unos gatos La presente invención se refiere a una torreta hexápoda y gato para ser utilizado en la torreta hexápoda.
Las torretas hexápodas, igualmente denominadas plataformas de Gough-Stewart, se utilizan para realizar una colocación muy precisa de objetos en el espacio. Comprenden un zócalo fijo y un plato móvil con relación al zócalo. El plato se puede desplazar de acuerdo con seis grados de libertad con relación al zócalo sobre el que está fijado un objeto del que se busca controlar su configuración en posición y en orientación. Las utilizaciones de este tipo de torretas son múltiples. Se las encuentra por ejemplo para la colocación de piezas mecánicas destinadas a ser mecanizadas, para la colocación de antenas parabólicas o de telescopios, para unos simuladores de vuelo o incluso para efectuar unos ensayos de comportamiento de materiales.
Una torreta hexápoda tal como la descrita en el documento DE 4 117 538 comprende generalmente seis patas de longitud regulable que unen el plato móvil al zócalo. Las patas están unidas por pares al plato móvil y al zócalo. Los pares están alternados de manera que las dos patas de un mismo par asociado al plato móvil pertenecen a dos pares diferentes asociadas al zócalo. En unas torretas hexápodas conocidas, cada pata comprende un gato lineal articulado a cada una de sus extremidades sobre el zócalo y sobre el plato móvil por medio de un enlace esférico de tres grados de libertad en rotación. La regulación coordinada de la longitud de cada una de las seis patas permite desplazar el plato móvil de acuerdo con seis grados de libertad.
Durante los desplazamientos del plato móvil, los gatos se disponen en conjunto para desplazarse en rotación alrededor de las rótulas que les unen al zócalo. Los gatos pueden ser hidráulicos o eléctricos. Son generalmente masivos e incluyen su propio sistema de motorización. El desplazamiento de los gatos forma una parte importante de la inercia global de la torreta. Esta inercia penaliza los movimientos rápidos de ésta.
La invención viene a reducir la inercia de una torreta hexápoda con el fin de facilitar unos movimientos rápidos del plato móvil.
Con este fin, la invención tiene por objetivo un gato adecuado para ser utilizado en una torreta hexápoda, comprendiendo el gato un cuerpo, un pistón móvil en traslación con relación al cuerpo y un vástago unido al pistón para seguir su movimiento de traslación y por intermedio de la que el gato ejerce un esfuerzo, caracterizado porque el vástago está unida al pistón por medio de un enlace de rótula.
La invención tiene igualmente por objetivo una torreta hexápoda que comprende seis gatos de acuerdo con la invención, comprendiendo la torreta un zócalo y un plato móvil, caracterizado porque los seis gatos están fijos al zócalo por su cuerpo y están unidos al plato móvil por medio de su segundo enlace de rótula.
La invención se comprenderá mejor y surgirán otras ventajas con la lectura de la descripción detallada de un modo de realización dado a título de ejemplo, descripción ilustrada por el dibujo adjunto en el que:
la figura 1 representa esquemáticamente un gato de acuerdo con la invención; la figura 2 representa un esquema cinemático de una torreta hexápoda de acuerdo con la invención; la figura 3 representa un ejemplo de realización de un gato tal como el esquematizado en la figura 1; la figura 4 representa un ejemplo de realización de una torreta hexápoda tal como la esquematizada en la figura 2.
Por razones de claridad, los mismos elementos llevarán las mismas referencias en las diferentes figuras.
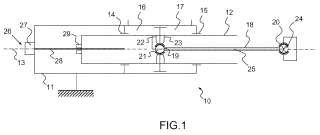
La figura 1 representa un gato lineal 10 que comprende un cuerpo 11 y un pistón 12 móvil en traslación con relación al cuerpo 11 de acuerdo con un eje 13 longitudinal. El pistón 12 está guiado en su movimiento de traslación por medio de dos cojinetes 14 y 15 que pertenecen al cuerpo 11. En el ejemplo representado, el gato es hidráulico, pero, por supuesto, la invención se puede implementar para otros modos de motorización del gato como por ejemplo para un gato eléctrico o neumático. El gato 10 es de doble efecto y comprende dos cámaras 16 y 17 realizadas en el cuerpo 11 y separadas por el pistón 12. Las dos cámaras 16 y 17 están alimentadas con un fluido hidráulico bajo presión. Una diferencia de presión del fluido hidráulico entre las dos cámaras 16 y 17 permite la traslación del pistón 12 a lo largo del eje 13. Es posible igualmente realizar la invención para un gato de simple efecto en el que se alimenta con fluido hidráulico una única cámara. La otra cámara puede sustituirse por un muelle que permite volver a llevar al pistón 12 a una posición a la que se llega para una presión nula del fluido hidráulico.
El gato 10 comprende un vástago 18 por medio del que el gato ejerce un esfuerzo. Más precisamente, el vástago 18 comprende dos extremidades 19 y 20. La extremidad 19 está unida al pistón 12 y la extremidad 20 toma su apoyo en un elemento exterior sobre el que se ejerce el esfuerzo producido por el gato 10. En un gato de la técnica anterior el vástago 18 es solidario con el pistón 12 a la altura de la extremidad 19. De acuerdo con la invención, el vástago 18 está unido al pistón por medio de un enlace de rótula 21 situado a la altura del extremo 19. Esta unión permite al vástago 18 desplazarse angularmente con relación al eje 13.
Al utilizar un gato hidráulico, el enlace de rótula 21 es, ventajosamente, hidrostático y se alimenta con fluido mediante la extracción del fluido realizada para maniobrar en gato 10. La extracción se puede realizar mediante uno o varios canales 22 y 23 que unen cada una de las cámaras 16 y 17 y el enlace de rótula 21. Debido este hecho, la presión del fluido en el enlace de rótula 21 depende de la presión del fluido en las cámaras 16 y 17. Así cuanto más cargado esté el gato, más importante es la presión en al menos una de las cámaras 16 ó 17 y más importante es la película hidrostática creada en el enlace de rótula 21.
El gato 10 puede comprender un segundo enlace de rótula 24 situado en la segunda extremidad 20 del vástago 18. Este segundo enlace de rótula 24 permite unir un objeto al gato 10. El esfuerzo ejercido por el gato 10 recorre el primer enlace de rótula 21, el vástago 18 y el segundo enlace de rótula 24. Ventajosamente, el segundo enlace de rótula 24 es igualmente hidrostático y se alimenta con fluido mediante la extracción del fluido realizada para maniobrar el gato 10. La extracción se puede realizar mediante un canal 25 situado en el interior del vástago 18 y que une los dos enlaces de rótula 21 y 24.
El gato puede comprender un captador 26 de posición del pistón 12 con relación al cuerpo 11 en su movimiento de traslación a lo largo del eje 13. El captador 26 es, por ejemplo, magnetostrictivo. Comprende una caja 27 solidaria con el cuerpo 11 y puede emitir una onda de ultrasonidos a lo largo de una barra ferromagnética 28. Un imán 29 solidario con el pistón 12 se desliza a lo largo de la barra 29 durante el desplazamiento del pistón 12 y modifica la onda de ultrasonidos. Una medida de esta onda efectuada en la caja 27 permite determinar la posición del pistón 12.
La figura 2 representa el esquema cinemático de una torreta 30 hexápoda que comprende un zócalo 31, un plato móvil 32 y seis gatos 10 tal como los descritos con la ayuda de la figura 1. El cuerpo 11 de cada uno de los gatos 10 está fijo al zócalo 31 y las direcciones de los movimientos de traslación de los pistones 12 están representadas por seis flechas dobles 33-1 a 33-6. Debido al hecho de la fijación de los cuerpos 11 sobre el zócalo 31, las direcciones 33-1 a 33-6 están fijas en el espacio en una referencia unida al zócalo 31. Los seis vástagos 18 y sus enlaces de rótula 21 y 24 llevan unas referencias de índices correspondientes a las direcciones: 18-1 a 18-6 para los vástagos, 21-1 a 21-6 para los primeros enlaces de rótula y 24-1 a 24-6 para los segundos enlaces de rótula.
La figura 3 representa un ejemplo de realización de un gato 10. En esta figura, se vuelve a encontrar el pistón 12 que puede desplazarse en traslación a lo largo del eje 13 en el cuerpo 11, el vástago 18 cuyas extremidades llevan los enlaces de rótula 21 y 24 así como una parte del plato móvil 32. En la figura 3 aparece un órgano de control hidráulico 35 del gato 10. El órgano 35 comprende por ejemplo una servoválvula que permite alimentar de fluido las dos cámaras 16 y 17.
En la técnica anterior en la que el cuerpo del gato es susceptible de desplazarse durante unos movimientos del plato móvil, es preferible fijar un órgano de ese tipo de control... [Seguir leyendo]
Reivindicaciones:
1. Torreta hexápoda que comprende un zócalo (31) , un plato (32) móvil y seis gatos (10-1 a 10-6) , comprendiendo cada uno de los gatos (10-1 a 10-6) un cuerpo (11) , un pistón (12) móvil en traslación con relación al cuerpo (11) y un vástago (18) unido al pistón (12) para seguir su movimiento de traslación y por medio del cual el gato (10-1 a 10
6) ejerce un esfuerzo, caracterizado porque para cada uno de los gatos (10-1 a 10-6) , el vástago (18) está unido al pistón (12) por medio de un enlace de rótula (21) a una primera (19) de sus extremidades (19, 20) y porque cada uno de los gatos (10-1 a 10-6) comprende un segundo enlace (24) de rótula situado en un segundo extremo (20) del vástago (18) y porque los seis gatos (10-1 a 10-6) están fijos al zócalo (31) por su cuerpo (11) y están unidos al plato móvil (32) por medio de su segundo enlace (24-1 .
2. 6) de rótula.
2. Torreta de acuerdo con la reivindicación 1, caracterizada porque los seis gatos (10-1 a 10-6) son hidráulicos y porque, para cada uno de los gatos (10-1 a 10-6) el enlace (21) de rótula es hidrostático y está alimentado con fluido mediante la extracción de un fluido realizada para maniobrar el gato (10) .
3. Torreta de acuerdo con la reivindicación 2, caracterizada porque para cada uno de los gatos (10-1 a 10-6) , el
segundo enlace (24) de rótula es hidrostático y está alimentado con fluido mediante la extracción del fluido realizada 15 para maniobrar el gato (10) .
4. Torreta de acuerdo con la reivindicación 3, caracterizada porque para cada uno de los gatos (10-1 a 10-6) , la alimentación con fluido del segundo enlace de rótula se realiza por medio de un canal (25) situado en el vástago (18) y que une los dos enlaces (21, 24) de rótula.
5. Torreta de acuerdo con una cualquiera de las reivindicaciones 2 a 4, caracterizada porque cada uno de los gatos
(10-1 a 10-6) comprende dos cámaras (16, 17) realizadas en el cuerpo (11) y separadas mediante el pistón (12) y porque para cada uno de los gatos (10-1 a 10-6) , se extrae fluido mediante uno o varios canales (22, 23) que unen cada una de las cámaras (16, 17) y el enlace (21) de rótula.
6. Torreta de acuerdo con una de las reivindicaciones precedentes, caracterizada porque cada uno de los gatos (10-1 a 10-6) comprende un órgano de control hidráulico (35) del gato (10) y porque el órgano (35) está fijo sobre el 25 cuerpo (11) del gato (10) .
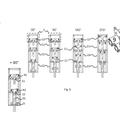
7. Torreta de acuerdo con una de las reivindicaciones precedentes, caracterizada porque comprende unos soportes (40, 41, 42) fijos al zócalo (31) y sobre los que se fijan los cuerpos (11) de los gatos (10-1 a 10-6) por pares, unos depósitos (44-1 .
4. 6, 45, 46 y 47) acumuladores de fluido hidráulico asociados a los gatos (10-1 a 106) y fijos sobre los soportes (40, 41, 42) .
Patentes similares o relacionadas:
Eje hidráulico, del 8 de Julio de 2020, de ROBERT BOSCH GMBH: Eje hidráulico con un cilindro que puede ser activado mediante una bomba , donde la bomba está instalada en una cavidad del […]
Actuador de cilindro de gas con dispositivo de seguridad para retorno descontrolado del pistón-vastago, del 24 de Junio de 2020, de SPECIAL SPRINGS S.R.L.: Un actuador de cilindro de gas con dispositivo de seguridad para un retorno descontrolado del pistón-vástago, que comprende: […]
Aparato de cilindro, del 29 de Abril de 2020, de KYB Corporation: Un dispositivo de cilindro (1b, 1c) que incluye: un cilindro ; un pistón insertado de manera deslizable en el cilindro; una varilla insertada […]
 Accionador giratorio de posicionamiento múltiple controlado por un fluido, del 29 de Abril de 2020, de Out And Out Chemistry S.P.R.L: Dispositivo para inducir un movimiento de rotación alrededor de una dirección longitudinal para el control de válvula y que comprende a lo largo de la citada dirección […]
Accionador giratorio de posicionamiento múltiple controlado por un fluido, del 29 de Abril de 2020, de Out And Out Chemistry S.P.R.L: Dispositivo para inducir un movimiento de rotación alrededor de una dirección longitudinal para el control de válvula y que comprende a lo largo de la citada dirección […]
Elevador hidráulico cilíndrico compuesto telescópico, del 15 de Abril de 2020, de Dawson, Steven Clare: Un elevador hidráulico telescópico de múltiples cilindros de material compuesto , que comprende: (a) un cilindro de etapa externa que tiene […]
Unidad de bateo, así como procedimiento para el bateo de una vía, del 11 de Diciembre de 2019, de Plasser & Theurer Export von Bahnbaumaschinen Gesellschaft m.b.H: Unidad de bateo con palancas de bateo que pueden moverse por pares en un movimiento de aproximación sobre un eje de giro y que están unidas por un […]
Actuador de cilindro de gas con dispositivo de seguridad de sobrerrecorrido, del 13 de Noviembre de 2019, de SPECIAL SPRINGS S.R.L.: Un actuador de cilindro de gas con dispositivo de seguridad de sobrerrecorrido que comprende: -una camisa de contención tubular […]
Máquina de timón, del 6 de Noviembre de 2019, de ThyssenKrupp Marine Systems GmbH: Máquina de timón , en especial para un vehículo submarino, con un circuito hidráulico en el que está dispuesta una bomba , en donde la bomba es una bomba hidráulica […]