Robot humanoide que implementa una articulación esférica con accionadores acoplados.
Robot humanoide que comprende una articulación (10, 100, 200) esférica con tres grados de libertad en rotación según tres ejes (13,
14, 15) que unen dos elementos (101, 103; 105, 104; 101, 102) del robot (5), siendo movida la articulación por tres accionadores (20, 35, 36) de los que un primero (35) y un segundo (36) actúan en paralelo y están acoplados y en el que un tercer accionador (20) actúa en serie con los dos primeros accionadores alrededor de un primero de los ejes (13), caracterizado porque el eje (13) del tercer accionador (20) es el eje (13) cuya oscilación angular debe ser la más importante para aproximarse al antropomorfismo humano.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2009/056678.
Solicitante: Bia.
Nacionalidad solicitante: Francia.
Dirección: Z.A Les Boutriers 8 rue de l'HAUTIL 78700 Conflans Ste Honorine FRANCIA.
Inventor/es: ALFAYAD,Samer, BEN OUEZDOU,Fathi, NAMOUN,Fayçal.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B62D57/032 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B62 VEHICULOS TERRESTRES QUE SE DESPLAZAN DE OTRO MODO QUE POR RAILES. › B62D VEHICULOS DE MOTOR; REMOLQUES (dirección o guiado de máquinas o instrumentos agrícolas según un recorrido determinado A01B 69/00; ruedas, ruedecillas pivotantes, mejora de la adherencia de ruedas B60B; neumáticos para vehículos, inflado de neumáticos, cambio o reparación de neumáticos B60C; conexiones entre vehículos de un mismo tren o de un conjunto similar B60D; vehículos raíl-carretera, vehículos anfibios o transformables B60F; disposiciones de suspensión B60G; calefacción, refrigeración, ventilación u otros dispositivos de tratamiento del aire B60H; ventanas, parabrisas, techos descapotables, puertas o dispositivos similares, cubiertas de protección para vehículos fuera de servicio B60J; disposiciones de conjuntos de propulsión, accionamientos auxiliares, transmisiones, disposición de instrumentos o tableros de a bordo B60K; equipo eléctrico o propulsión de vehículos de tracción eléctrica B60L; alimentación de energía eléctrica para vehículos de tracción eléctrica B60M; disposiciones para pasajeros no previstas en otro lugar B60N; vehículos adaptados al transporte de cargas o para llevar cargas u objetos especiales B60P; adaptación de los dispositivos de señalización o de iluminación, su montaje o soporte, circuitos a este efecto, para vehículos en general B60Q; vehículos, equipos o partes de vehículos, no previstos en otro lugar B60R; servicio,limpieza, reparación, elevación o maniobra, no previstos en otro lugar B60S; frenos, sistemas de control de frenos o partes de estos sistemas B60T; vehículos de colchón de aire B60V; ciclos de motor, sus accesorios B62J, B62K; ensayo de vehículos G01M). › B62D 57/00 Vehículos caracterizados por medios de propulsión o de contacto con el suelo diferentes de ruedas y orugas, solos o complementando a las ruedas o a las orugas (trineos B62B; trineos de motor B62M). › con una base de sustentación y patas elevadas alternativamente o en un orden determinado; con pies o patines elevados alternativamente o en un orden determinado (B62D 57/024 tiene prioridad).
PDF original: ES-2382307_T3.pdf
Fragmento de la descripción:
Robot humanoide que implementa una articulación esférica con accionadores acoplados La invención se refiere a un robot humanoide que implementa una articulación esférica con accionadores acoplados y a un procedimiento que implementa la articulación. La invención encuentra una utilidad particular en la realización de robots humanoides que se aproximan mejor al antropomorfismo humano. Por ejemplo, la articulación esférica de acuerdo con la invención se puede implementar para una cadera, un hombro o una articulación entre una pelvis y un tronco del robot.
Un modelo matemático que modeliza este antropomorfismo se ha desarrollado en los años 1960 en los Estados Unidos por Aerospace Medical Research Laboratories situado en Dayton, Ohio. Ese modelo, bien conocido bajo nombre de modelo de Hanavan, describe de manera paramétrica, en relación a una talla y masa humanas dadas, las dimensiones de todas las partes del cuerpo. Por ejemplo, se describe la cadera como una articulación que posee tres grados de libertad en rotación. Se describen igualmente las dimensiones de la cadera y de las partes del cuerpo que la rodean: pelvis y muslo. Por ejemplo, para un adolescente de 14 años, de talla 1, 6 m y de masa 50 kg, el muslo se puede representar por un tronco de cono de 392 mm de altura, de 46 mm de radio menor y de 74 mm para el radio mayor. Para el mismo robot y utilizando este modelo, la pelvis se representa por un paralelepípedo de 189 mm de altura, 230 mm de largo y 160 mm de profundidad. La distancia entre las dos caderas es igual a dos veces el radio mayor del muslo. La altura del muslo se define como la distancia entre la articulación formada por la cadera y la formada por la rodilla.
Un cálculo dinámico, muestra que para realizar una marcha a una velocidad de 1, 2 m/s, y siempre para un robot de 1, 6 m y 50 kg, la articulación de la cadera en el plano sagital necesita un par del orden de 35 N·m, con una velocidad máxima de 2, 7 rad/s y una oscilación articular de -30º a +30º. Por el contrario, en el plano frontal la articulación necesita un par del orden de 35 N·m, con una velocidad máxima del orden de 1 rad/s, y una oscilación articular de 5º a +10º.
En el momento actual, se han desarrollado numerosos robots humanoides, pero ninguno respeta el modelo de Hanavan, principalmente en relación al volumen de la pierna y del hombro. Se encuentran por ejemplo robots cuya cadera se reduce a una articulación del tipo junta de cardán, es decir no incluye más que dos grados de libertad, una rotación en el plano sagital y una rotación en el plano frontal. Además, los mecanismos de accionamiento utilizados para motorizar estos dos grados de libertad, siguiendo los parámetros resultantes del cálculo dinámico, se salen de las dimensiones previstas en el modelo de Hanavan. Se encuentran igualmente robots cuya oscilación angular de la cadera en el plano sagital del robot no permite obtener una longitud de zancada suficiente para obtener una velocidad de marcha del robot asimilable a la de un humano, tal como se describe en el documento EP 1 433 694 A1.
La invención trata de mejorar la concordancia entre la realización de un robot y la anatomía humana, por ejemplo la aproximada por el modelo de Hanavan.
Con este fin, la invención tiene por objeto un robot humanoide que comprende una articulación esférica con tres grados de libertad en rotación que enlaza dos elementos del robot, siendo movida la articulación por tres accionadores en los que un primer y un segundo actúan en paralelo y están acoplados y en el que el tercer accionador actúa en serie con los dos primeros accionadores alrededor de un eje, caracterizado porque el eje del tercer accionador es el eje cuya oscilación angular debe ser más importante para aproximarse al antropomorfismo humano.
La invención tiene igualmente por objeto un procedimiento de accionamiento de un robot humanoide cuya articulación comprende dos émbolos, estando caracterizado el procedimiento porque para mover la articulación de acuerdo con un primer eje de la articulación, se actúa simultáneamente sobre los dos émbolos en el mismo sentido y porque para mover la articulación de acuerdo con un segundo eje de la articulación, se actúa simultáneamente sobre los dos émbolos en sentido opuesto.
En el caso de la cadera, gracias a los tres grados de libertad, respectivamente en un plano frontal, un plano sagital y un plano horizontal, la marcha de un robot humanoide que implemente una cadera de acuerdo con la invención será mucho más antropomórfica, principalmente en relación a su oscilación angular importante en el plano sagital. El hecho de acoplar los accionadores permitiendo las rotaciones alrededor de un eje vertical y frontal permite reducir el volumen de la articulación. Por el contrario, este acoplamiento limita la oscilación angular alrededor del eje considerado. El tercer accionador permite la rotación alrededor de un eje perpendicular al plano sagital y se mantiene independientemente de los dos otros lo que permite conservar una oscilación angular importante para este tercer accionador. En la invención, se realiza la elección de utilizar este tercer accionador independiente para el movimiento preponderante de la articulación, es decir la rotación que reclama la oscilación angular más grande en el antropomorfismo humano, por ejemplo como la que se define en el modelo de Hanavan.
Se comprenderá mejor la invención y surgirán otras ventajas con la lectura de la descripción detallada de un modo de realización dado a modo de ejemplo, descripción ilustrada por los dibujos adjuntos en los que:
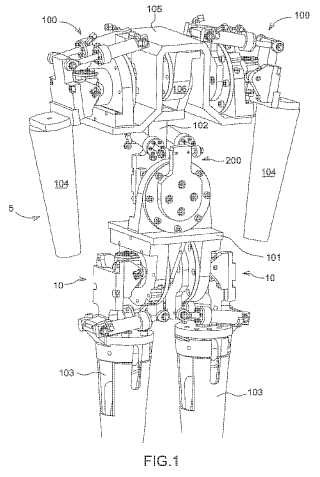
la figura 1 representa en perspectiva un robot humanoide que comprende varias articulaciones esféricas de acuerdo con la invención; la figura 2 representa en perspectiva una cadena de acuerdo con la invención; la figura 3 representa la cadera en un corte en el plano frontal; la figura 4 representa un corte de los accionadores de la cadera; la figura 5 representa un corte de una cruceta de la cadera; la figura 6 representa un corte de los dos otros accionadores de la cadera; la figura 7 representa en perspectiva un hombro de acuerdo con la invención; la figura 8 representa un corte del hombro de la figura 7; la figura 9 representa en perspectiva una articulación de acuerdo con la invención entre un muslo y un tronco del robot; la figura 10 representa un corte de la articulación de la figura 9.
Por razones de claridad, los mismos elementos llevarán las mismas designaciones en las diferentes figuras. El dibujo se proporciona a título ilustrativo y las escalas no se respetan totalmente.
La figura 1 representa en perspectiva un robot humanoide 5 que comprende varias articulaciones esféricas de acuerdo con la invención entre ellas dos caderas 10, dos hombros 100 y una articulación 200 entre un muslo 101 y un tronco 102 del robot 5. Cada cadera 10 une un muslo 103 a la pelvis 101. Cada hombro 100 une un brazo 104 a un torso 105 del robot 5. Se puede disponer entre el tronco 102 y el torso 105 una articulación 106 con un grado de libertad en rotación alrededor de un eje sagital del robot 5. Por convención, se designa como eje sagital, un eje perpendicular al plano sagital, plano vertical en el que se realiza principalmente el movimiento de marcha del robot. Igualmente, se designa como eje frontal, un eje perpendicular al plano frontal del robot. El plano frontal es vertical y perpendicular al plano sagital. Finalmente, se designa como eje vertical, un eje formado por la intersección entre el plano sagital y el plano frontal.
La figura 2 representa una cadera 10 de acuerdo con la invención. La cadera 10 comprende una primera pieza de interfaz 11 solidaria con la pelvis 101 y una segunda pieza de interfaz 12 solidaria con el muslo 103. Para no sobrecargar las diferentes figuras, no se representan ni el muslo ni la cadera y solamente se representan los elementos de la cadera 10 que unen las dos piezas de interfaz 11 y 12.
La cadera 10 comprende tres accionadores que permiten cada uno mover en rotación la cadera con relación a la pelvis alrededor de un eje, siendo distintos los tres ejes. Más precisamente, en el ejemplo representado, el primer eje 13 es un eje sagital, el segundo eje 14 es un eje frontal y el tercer eje 15 es vertical.
Los accionadores pueden utilizar energía hidráulica o eléctrica.
La figura 3 representa la cadera en corte en un plano frontal. Esta figura permite visualizar mejor los accionadores. El accionador que permite mover la cadera alrededor del eje sagital 13 es un motor rotativo hidráulico 20 que... [Seguir leyendo]
Reivindicaciones:
1. Robot humanoide que comprende una articulación (10, 100, 200) esférica con tres grados de libertad en rotación según tres ejes (13, 14, 15) que unen dos elementos (101, 103; 105, 104; 101, 102) del robot (5) , siendo movida la articulación por tres accionadores (20, 35, 36) de los que un primero (35) y un segundo (36) actúan en paralelo y están acoplados y en el que un tercer accionador (20) actúa en serie con los dos primeros accionadores alrededor de un primero de los ejes (13) , caracterizado porque el eje (13) del tercer accionador (20) es el eje (13) cuya oscilación angular debe ser la más importante para aproximarse al antropomorfismo humano.
2. Robot humanoide según la reivindicación 1, caracterizado porque comprende dos elementos (12, 22) unidos por un enlace (37) con dos grados de libertad en rotación de acuerdo con el segundo y tercer eje (14, 15) secantes en un punto (38) y movido por el primer y el segundo accionador (35, 36) , porque los dos accionadores (35, 36) que actúan en paralelo están formados cada uno por un émbolo lineal (35, 36) dispuesto entre los dos elementos (12, 22) unidos por el enlace (37) , desplazándose cada émbolo (35, 36) según un eje (39, 40) y porque el punto de intersección (38) de los ejes (14, 15) del enlace (37) no se sitúa sobre los ejes (39, 40) de los émbolos (35, 36) .
3. Robot humanoide de acuerdo con la reivindicación 2, caracterizado porque el enlace (37) comprende una cruceta (45) que puede pivotar alrededor de un eje (15) del enlace (37) con relación a un primero (22) de los dos elementos unidos por el enlace (37) y alrededor del otro eje (14) del enlace (37) con relación a un segundo (12) de los dos elementos.
4. Robot humanoide según una de las reivindicaciones 2 ó 3, caracterizado porque los ejes (39, 40) de los dos émbolos lineales (35, 36) son paralelos.
5. Robot humanoide según una de las reivindicaciones precedentes, caracterizado porque el accionador es un motor rotativo (20) que comprende un estator (21) y un rotor (22) , accionando el motor (20) la articulación (10) .
6. Robot humanoide según una de las reivindicaciones precedentes, caracterizado porque el tercer accionador (20) comprende un estator (21) y un rotor, y porque el estator (21) es solidario con el elemento (101, 105) del robot (5) más próximo con relación al centro de gravedad del robot (5) .
7. Robot humanoide según una de las reivindicaciones precedentes, caracterizado porque los accionadores (20, 35, 36) utilizan energía hidráulica.
8. Robot humanoide según una de las reivindicaciones precedentes, caracterizado porque la articulación es una cadera (10) , porque el primer elemento es una muslo (103) y el segundo elemento es una pelvis (101) , porque el primer eje (13) es un eje sagital, el segundo eje (14) es un eje frontal y el tercer eje (15) es un eje vertical y porque los dos primeros accionadores (35, 36) que permiten la rotación alrededor del eje frontal (14) y del eje vertical (15) actúan en paralelo sobre el muslo (103) .
9. Robot humanoide según una de las reivindicaciones precedentes, caracterizado porque la articulación es un hombro (100) , porque el primer elemento es un brazo (104) y el segundo elemento es un torso (105) , porque el primer eje (13) es un eje sagital, el segundo eje (14) es un eje frontal y el tercer eje (15) es un eje vertical y porque los dos primeros accionadores (35, 36) que permiten la rotación alrededor del eje frontal (14) y del eje vertical (15) actúan en paralelo sobre el brazo (104) .
10. Robot humanoide según una de las reivindicaciones precedentes, caracterizado porque el primer elemento es una pelvis (101) y el segundo elemento es un tronco (102) , porque el primer eje (13) es un eje frontal, el segundo eje (14) es un eje sagital y el tercer eje (15) es un eje vertical y porque los dos primeros accionadores (35, 36) que permiten la rotación alrededor del eje sagital (14) y del eje vertical (15) actúan en paralelo sobre el tronco (102) .
11. Procedimiento de accionamiento un robot humanoide según una de las reivindicaciones 2 a 9 en tanto reivindicación dependiente de la reivindicación 2, caracterizado porque para mover la articulación (10, 100, 200) de acuerdo con un primer eje (14) del enlace (37) , se actúa simultáneamente sobre los dos émbolos (35, 36) en el mismo sentido y porque para mover la articulación (10, 100, 200) según un segundo eje (15) del enlace (37) , se actúa simultáneamente sobre los dos émbolos (35, 36) en sentido opuesto.
Patentes similares o relacionadas:
Robot humanoide que implementa una articulación esférica, del 8 de Mayo de 2019, de Bia: Robot humanoide, que comprende dos elementos conectados por una articulación esférica con tres grados de libertad en rotación, […]
Seguridad de un robot de carácter humanoide, del 3 de Diciembre de 2018, de Softbank Robotics Europe: Robot de carácter humanoide (10; 10') que comprende dos elementos y una articulación de al menos un grado de libertad que une […]
Articulación motorizada segura destinada a equipar un robot de carácter humanoide, del 3 de Diciembre de 2018, de Softbank Robotics Europe: Articulación motorizada segura destinada a montarse entre un primer y segundo miembro (7a, 7b) de un robot de carácter humanoide (10'), que comprende: […]
MODULO ROBÓTICO Y ROBOT MODULAR QUE COMPRENDE DICHO MÓDULO ROBÓTICO, del 4 de Octubre de 2018, de UNIVERSIDAD MIGUEL HERNANDEZ: Modulo robótico que mediante un actuador único puede moverse por entornos tridimensionales. El módulo robótico es de configuración sencilla y ligera con un […]
MÓDULO ROBÓTICO Y ROBOT MODULAR QUE COMPRENDE DICHO MÓDULO ROBÓTICO, del 2 de Octubre de 2018, de UNIVERSIDAD MIGUEL HERNANDEZ: Módulo robótico y robot modular que comprende dicho módulo robótico. Modulo robótico que mediante un actuador único puede moverse por entornos […]
Robot con articulaciones de rigidez variable y procedimiento de cálculo de dicha rigidez optimizada, del 22 de Noviembre de 2017, de Softbank Robotics Europe: Robot dotado de capacidades de desplazamiento en al menos una cadena articulada que comprende, al menos, un sensor de contacto del extremo de […]
Sistema de montaje con seguimiento autónomo, del 12 de Abril de 2017, de THE BOEING COMPANY: Un dispositivo, que comprende: un dispositivo motorizado automatizado operable para moverse en una estructura para utilizarse […]
Robot humanoide dotado de un gestor de sus recursos físicos y virtuales, procedimientos de utilización y de programación, del 21 de Enero de 2015, de Aldebaran Robotics S.A: Robot humanoide adecuado para ejecutar una pluralidad de comportamientos bajo el control de un módulo de gestión integrado a bordo que […]