Sistema de montaje con seguimiento autónomo.
Un dispositivo, que comprende:
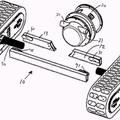
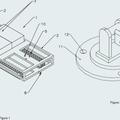
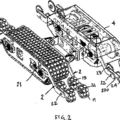
un dispositivo (110) motorizado automatizado operable para moverse en una estructura (100) para utilizarse en el montaje de la estructura (100),
el dispositivo (110) motorizado automatizado que comprende:
un efector (120) extremo configurado para realizar una pluralidad de funciones relacionadas con el montaje;
un primer conjunto (140) de movimiento, que comprende una primera pluralidad de componentes (160) de movimiento de función doble;
un segundo conjunto (150) que comprende una segunda pluralidad de componentes (160) de movimiento de función doble; y
un conjunto (130) de pivotamiento conectado de forma concéntrica al efector (120) extremo, y al menos uno de, el primer conjunto (140) de movimiento y el segundo conjunto (150) de movimiento;
en donde:
las funciones de cada componente (160) de movimiento de función doble comprenden adherir y deslizar; y
durante el movimiento del dispositivo (110) motorizado automatizado, uno de, el primer conjunto (140) de movimiento y el segundo conjunto (150) de movimiento está fijado a la estructura (100) mientras que el otro de, el primer conjunto (140) de movimiento y el segundo conjunto (150) de movimiento se mueve sobre la estructura (100), caracterizado porque el primer conjunto (140) de movimiento y el segundo conjunto (150) de movimiento están configurados para ajustar una trayectoria del movimiento del dispositivo (110) motorizado automatizado durante el funcionamiento del dispositivo (110) motorizado automatizado, en donde el ajuste de la trayectoria del movimiento del dispositivo (110) motorizado automatizado comprende girar a través del conjunto (130) de pivotamiento, al menos uno de, el primer conjunto (140) de movimiento y el segundo conjunto (150) de movimiento mientras que el otro de, el primer conjunto (140) de movimiento y el segundo conjunto (150) de movimiento fija el dispositivo (110) monitorizado automatizado a la estructura (100).
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/US2013/059842.
Solicitante: THE BOEING COMPANY.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 100 NORTH RIVERSIDE PLAZA CHICAGO, IL 60606-1596 ESTADOS UNIDOS DE AMERICA.
Inventor/es: GAMBOA,JAMES DARRYL.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B62D55/265 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B62 VEHICULOS TERRESTRES QUE SE DESPLAZAN DE OTRO MODO QUE POR RAILES. › B62D VEHICULOS DE MOTOR; REMOLQUES (dirección o guiado de máquinas o instrumentos agrícolas según un recorrido determinado A01B 69/00; ruedas, ruedecillas pivotantes, mejora de la adherencia de ruedas B60B; neumáticos para vehículos, inflado de neumáticos, cambio o reparación de neumáticos B60C; conexiones entre vehículos de un mismo tren o de un conjunto similar B60D; vehículos raíl-carretera, vehículos anfibios o transformables B60F; disposiciones de suspensión B60G; calefacción, refrigeración, ventilación u otros dispositivos de tratamiento del aire B60H; ventanas, parabrisas, techos descapotables, puertas o dispositivos similares, cubiertas de protección para vehículos fuera de servicio B60J; disposiciones de conjuntos de propulsión, accionamientos auxiliares, transmisiones, disposición de instrumentos o tableros de a bordo B60K; equipo eléctrico o propulsión de vehículos de tracción eléctrica B60L; alimentación de energía eléctrica para vehículos de tracción eléctrica B60M; disposiciones para pasajeros no previstas en otro lugar B60N; vehículos adaptados al transporte de cargas o para llevar cargas u objetos especiales B60P; adaptación de los dispositivos de señalización o de iluminación, su montaje o soporte, circuitos a este efecto, para vehículos en general B60Q; vehículos, equipos o partes de vehículos, no previstos en otro lugar B60R; servicio,limpieza, reparación, elevación o maniobra, no previstos en otro lugar B60S; frenos, sistemas de control de frenos o partes de estos sistemas B60T; vehículos de colchón de aire B60V; ciclos de motor, sus accesorios B62J, B62K; ensayo de vehículos G01M). › B62D 55/00 Vehículos de orugas (bajo el aspecto de la dirección B62D 11/00). › teniendo adherencia magnética o neumática.
- B62D57/032 B62D […] › B62D 57/00 Vehículos caracterizados por medios de propulsión o de contacto con el suelo diferentes de ruedas y orugas, solos o complementando a las ruedas o a las orugas (trineos B62B; trineos de motor B62M). › con una base de sustentación y patas elevadas alternativamente o en un orden determinado; con pies o patines elevados alternativamente o en un orden determinado (B62D 57/024 tiene prioridad).
PDF original: ES-2633175_T3.pdf
Patentes similares o relacionadas:
Rueda magnética, del 19 de Febrero de 2020, de Tas Global Co., Ltd: Una rueda magnética que comprende: un bloque de equilibrio que incluye un cuerpo de bloque circular y una primera porción de marco que tiene un diámetro […]
Dispositivo de oruga, del 9 de Enero de 2019, de Tas Global Co., Ltd: Un dispositivo de oruga que comprende: una parte de eliminación de película de agua que se proporciona en un miembro (C) de transmisión de potencia que incluye […]
Plataforma Autopropulsada, del 10 de Diciembre de 2018, de SEGUÍ GÓMEZ, Ricardo: 1. Plataforma autopropulsada, para elevación de cargas en el fuste metálico de un aerogenerador o una estructura similar, caracterizada porque […]
ROBOT DE MANTENIMIENTO, del 26 de Mayo de 2017, de Tratamiento Superficial Robotizado, S. L: Robot para el mantenimiento de superficies aproximadamente verticales, con dispositivo para impedir el vuelco por cabeceo del robot al desplazarse por las […]
 Oruga de pared de vacío, del 9 de Marzo de 2016, de FORCE TECHNOLOGY: Una oruga de pared de vacío que tiene al menos una unidad de pista de vacío , que comprende:
- un bastidor de pista ;
- dos poleas provistas en […]
Oruga de pared de vacío, del 9 de Marzo de 2016, de FORCE TECHNOLOGY: Una oruga de pared de vacío que tiene al menos una unidad de pista de vacío , que comprende:
- un bastidor de pista ;
- dos poleas provistas en […]
 Robot de mantenimiento, del 22 de Diciembre de 2015, de Tratamiento Superficial Robotizado, S. L: Robot para el mantenimiento de superficies aproximadamente verticales, con dispositivo para impedir el vuelco por cabeceo del robot al desplazarse por las superficies verticales […]
Robot de mantenimiento, del 22 de Diciembre de 2015, de Tratamiento Superficial Robotizado, S. L: Robot para el mantenimiento de superficies aproximadamente verticales, con dispositivo para impedir el vuelco por cabeceo del robot al desplazarse por las superficies verticales […]
 ROBOT PARA EL TRATAMIENTO ESTRUCTURAS METALICAS, del 27 de Marzo de 2014, de ELIOT SYSTEMS, S.L: Robot para el tratamiento de estructuras metálicas, del tipo que comprende dos unidades de accionamiento por oruga y desplazamiento mediante […]
ROBOT PARA EL TRATAMIENTO ESTRUCTURAS METALICAS, del 27 de Marzo de 2014, de ELIOT SYSTEMS, S.L: Robot para el tratamiento de estructuras metálicas, del tipo que comprende dos unidades de accionamiento por oruga y desplazamiento mediante […]
 ROBOT PARA TRATAR Y/O TRABAJAR SOBRE ESTRUCTURAS EXTERNAS DE ACERO, del 25 de Noviembre de 2009, de SIN ANDAMIOS ALMANSA, SL: Robot para tratar y/o trabajar superficies o partes externas de estructuras grandes de acero, dicho robot siendo del tipo con orugas para su desplazamiento […]
ROBOT PARA TRATAR Y/O TRABAJAR SOBRE ESTRUCTURAS EXTERNAS DE ACERO, del 25 de Noviembre de 2009, de SIN ANDAMIOS ALMANSA, SL: Robot para tratar y/o trabajar superficies o partes externas de estructuras grandes de acero, dicho robot siendo del tipo con orugas para su desplazamiento […]