CONVERSOR DE ENERGÍA MECÁNICA EN ENERGÍA HIDRÁULICA Y ROBOT QUE IMPLEMENTA EL CONVERSOR.
Conversor de energía mecánica en energía hidráulica, que comprende un árbol (10) arrastrado en rotación por la energía mecánica alrededor de un primer eje (13) respecto de un cárter (14),
un cubo (20) que incluye un escariado (21) formado alrededor de un segundo eje (22), girando el árbol (10) en el escariado (21), estando los dos ejes (13, 22) paralelos y formando una distancia entre los ejes una excentricidad (E), al menos dos pistones (23, 24, 25) susceptibles de desplazarse cada uno en un alojamiento (26, 27, 28) radial del árbol (10), garantizando los alojamientos el guiado de los pistones (23, 24, 25), apoyándose los pistones (26, 27, 28) en el escariado (21), arrastrando el desplazamiento de los pistones (26, 27, 28, 32, 33, 34, 35) un fluido hidráulico en dos ranuras (40, 41) anulares del cárter (14), estando las ranuras (40, 41) dispuestas en forma de arco de circunferencia alrededor del primer eje (13), siendo la energía hidráulica generada por una diferencia de presión del fluido presente entre las dos ranuras (40, 41), caracterizado porque el cubo (20) es móvil en traslación según un tercer eje (46) perpendicular a los dos primeros ejes (13, 22) para modificar el valor de la excentricidad (E) entre dos valores extremos, siendo uno positivo y el otro negativo de manera a permitir una inversión de las presiones de fluido en las ranuras (40, 41)a la vez que se conserva un mismo sentido de rotación para el árbol (10)
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2009/053553.
Dirección: Z.A Les Boutriers 8 rue de l'HAUTIL 78700 Conflans Ste Honorine FRANCIA.
Inventor/es: ALFAYAD,Samer, BEN OUEZDOU,Fathi, NAMOUN,Fayçal.
Fecha de Publicación: .
Fecha Solicitud PCT: 25 de Marzo de 2009.
Clasificación Internacional de Patentes:
F04B1/047MECANICA; ILUMINACION; CALEFACCION; ARMAMENTO; VOLADURA. › F04MAQUINAS DE LIQUIDOS DE DESPLAZAMIENTO POSITIVO; BOMBAS PARA LIQUIDOS O PARA FLUIDOS COMPRESIBLES. › F04B MAQUINAS DE DESPLAZAMIENTO POSITIVO PARA LIQUIDOS; BOMBAS (máquinas para líquidos o bombas, de tipo pistón rotativo u oscilante F04C; bombas de desplazamiento no positivo F04D; bombeo de fluido por contacto directo con otro fluido o por utilización de la inercia del fluido para bombear F04F). › F04B 1/00 Máquinas o bombas multicilindros caracterizadas por el número o la disposición de los cilindros (máquinas o bombas con pistones que cooperan dentro de un cilindro F04B 3/00). › con elementos accionadores o accionados en las extremidades exteriores del cilindro.
F04B1/047C
F04B1/07F04B 1/00 […] › modificando la excentridad relativa entre dos miembros, p. ej. una leva y un árbol motor.
Clasificación PCT:
F04B1/047F04B 1/00 […] › con elementos accionadores o accionados en las extremidades exteriores del cilindro.
F04B1/07F04B 1/00 […] › modificando la excentridad relativa entre dos miembros, p. ej. una leva y un árbol motor.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania, Bosnia y Herzegovina, Bulgaria, República Checa, Estonia, Croacia, Hungría, Islandia, Noruega, Polonia, Eslovaquia, Turquía, Malta, Serbia.
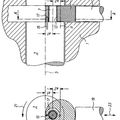
Conversor de energía mecánica en energía hidráulica y robot que implementa el conversor La invención se refiere a un conversor de energía mecánica en energía hidráulica, según el preámbulo de la reivindicación 1, y un robot según la reivindicación 14 que implementa el conversor La invención encuentra una utilidad particular en la realización de robots humanoides para los cuales se busca mejorar la autonomía. Tales robots están equipados con mecanismos de accionamiento que permiten mover las diferentes partes del robot. Estos mecanismos conectan una fuente de alimentación que proporciona una energía mecánica tal como por ejemplo, un motor eléctrico, hidráulico o neumático, a una carga. Dicho de otro modo, un mecanismo de accionamiento garantiza una transmisión de potencia mecánica entre un motor y una carga. Un parámetro esencial de un mecanismo de accionamiento es su relación de transmisión que se elige para adaptar un punto de funcionamiento nominal de la carga con el del motor. En un mecanismo de accionamiento conocido cuya relación de transmisión es constante, por ejemplo realizado mediante trenes de engranajes, la elección de la relación se limita a valores discretos y el cambio de relación necesita dispositivos complicados tales como una caja de cambios para adaptar la relación de transmisión. Ahora bien, en las aplicaciones robóticas, el punto de funcionamiento de las cargas es generalmente muy variable. Si la relación de reducción es constante, esto conduce a dimensionar e motor para el caso más desfavorable de utilización de la carga. Existen dispositivos que permiten variar la relación de transmisión de manera continua pero estos son complicados y su rendimiento a menudo mediocre. Se conocen, por ejemplo, reductores de velocidad de correas cuya relación de transmisión varía en función de la velocidad del motor mediante masas de inercia. Un conversor con las características técnicas según el preámbulo de la reivindicación 1 es conocido por el documento EP1 293 667 A1. Los dispositivos de accionamiento descritos anteriormente son voluminosos, pesados y complejos lo cual es perjudicial para las aplicaciones robóticas. Además, entre los motores anteriormente mencionados, los motores eléctricos no están bien adaptados más que para velocidades importantes y pares bajos. En las aplicaciones robóticas, la situación inversa es frecuente: velocidad baja y par importante. La aplicación de motores eléctricos para velocidad baja impone relaciones de reducción importantes, por lo tanto complicadas de realizar. De manera conocida, en las aplicaciones robóticas, se utiliza un grupo hidráulico central conectado a diferentes conexiones a motorizar por canalizaciones que transportan un fluido a presión. Cuando el robot comprende un gran número de accionadores, la red comprende un gran número de accionadores, la red de canalización se vuelve compleja. Asimismo, el grupo hidráulico debe proporcionar a todas las conexiones la presión máxima impuesta por la conexión más solicitada. La invención tiene como objetivo paliar todos o parte de los problemas anteriormente mencionados proponiendo un mecanismo de accionamiento que transforma la energía mecánica proporcionada por un motor en energía hidráulica utilizada por una carga, por ejemplo en forma de un gato, permitiendo mover una parte móvil de un robot. Se entiende evidentemente que la invención no se limita al campo robótico. La invención se puede aplicar en cualquier campo donde se busca optimizar un mecanismo de accionamiento. Más concretamente, la invención propone un conversor de energía mecánica en energía hidráulica que se puede descentralizar, es decir asociado a una sola carga. El conversor no proporciona entonces más que la potencia hidráulica requerida por la carga. Con este fin, la invención tiene por objeto un conversor de energía mecánica en energía hidráulica que comprende un árbol impulsado en rotación por la energía mecánica alrededor de un primer eje respecto de un cárter, un cubo que incluye un escariado formado alrededor de un segundo eje, girando el árbol en el escariado, siendo los dos ejes paralelos y formando una distancia entre los ejes una excentricidad, al menos dos pistones susceptibles de desplazarse cada uno en un alojamiento radial del árbol, garantizando los alojamientos el guiado de los pistones, apoyándose los pistones en el escariado, arrastrando el desplazamiento de los pistones un fluido hidráulico en dos ranuras anulares del cárter, estando las ranuras dispuestas en forma de arco de circunferencia alrededor del primer eje, siendo la energía hidráulica generada por una diferencia de presión del fluido presente entre las dos ranuras, caracterizado porque el cubo es móvil en traslación según un tercer eje perpendicular a los dos primeros ejes para modificar el valor de la excentricidad entre dos valores extremos, siendo uno positivo y el otro negativo de manera a permitir una inversión de las presiones de fluido en las ranuras a la vez que se conserva un mismo sentido de rotación para el árbol. Una de las ranuras forma la admisión y la otra ranura forma la salida del conversor. El hecho de invertir las presiones de fluido entre las ranuras conlleva el intercambio de las funciones entre la admisión y la salida de las ranuras a la vez que se conserva un mismo sentido de rotación para el árbol. 2 E09724364 07-10-2011 La invención tiene también por objeto un robot que comprende varias conexiones independientes movidas por energía hidráulica, caracterizado porque comprende, además, tantos conversores según la invención como conexiones independientes, estando cada conversor asociado a una conexión. La invención se entenderá mejor y se harán evidentes otras ventajas con la descripción detallada de varias variantes de realización ofrecidas a título de ejemplo, descripción ilustrada por los dibujos adjuntos en los cuales: - la figura 1 representa en corte un ejemplo de realización de un conversor según la invención; - la figura 2 representa para el conversor de la figura 1, elementos que garantizan el bombeo de un fluido hidráulico ; - La figura 3 representa una variante de realización de los elementos representados en la figura 2; - la figura 4 representa orificios de admisión y de salida de fluido del conversor; - la figura 5 representa medios para modificar una excentricidad del conversor; - la figura 6 representa un esquema hidráulico de una válvula del conversor; - las figuras 7a y 7b representan dos posiciones de los medios para modificar la excentricidad; - la figura 8 representa un esquema hidráulico de un distribuidor de una primera variante del conversor; - las figuras 9 y 10 representan un ejemplo de realización del distribuidor de la figura 8; estas dos figuras son cortes en planos perpendiculares. - las figuras 11a a 11g representan diferentes posiciones de una pieza móvil del distribuidor de la primera variante; - las figuras 12a a 12b representan un esquema hidráulico de dos distribuidores de una segunda variante del conversor; - las figuras 13 y 14 representan un ejemplo de realización de los distribuidores de las figuras 12a y 12b; - las figuras 15a a 15g representan diferentes posiciones de una pieza móvil del primer distribuidor de la segunda variante; - las figuras 16a y 16b representan diferentes posiciones de una pieza móvil del segundo distribuidor de la segunda variante. Por motivos de claridad, los mismos elementos llevarán las mismas referencias en las diferentes figuras. El conversor representado en la figura 1 recibe energía mecánica en forma de un movimiento de rotación de un árbol 10 accionado por un motor 11 por ejemplo eléctrico de corriente continua. El motor 11 gira a una velocidad de rotación constante, lo cual permite optimizar su funcionamiento. El árbol 10 está conectado al motor 11 por su acoplamiento 12. También es posible suprimir el acoplamiento 12 realizando directamente enrollamiento estatóricos del motor 11 en el árbol 10. El árbol 10 gira alrededor de un eje 13 respecto de un cárter 14 cerrado al nivel de los extremos del árbol 10 por dos tapas 15 y 16. En cada tapa 15 y 16, un rodamiento, respectivamente 17 y 18 garantiza el guiado, limita las fricciones entre el árbol 10 y el conjunto formado por el cárter 14, y las tapas 15 y 16 y garantiza la estanqueidad del conversor. La figura 2 representa elementos del conversor que garantizan el bombeo de un fluido hidráulico. Con este fin, el conversor comprende un cubo 20 que incluye un escariado 21 formado alrededor de un segundo eje 22. El árbol 10 gira en el escariado 21. Los dos ejes 13 y 22 son paralelos y una distancia entre los ejes 13 y 22 forma una excentricidad E. El conversor comprende al menos dos pistones susceptibles de desplazarse cada uno en un alojamiento radial del árbol. Es posible aplicar... [Seguir leyendo]
Reivindicaciones:
1.- Conversor de energía mecánica en energía hidráulica, que comprende un árbol (10) arrastrado en rotación por la energía mecánica alrededor de un primer eje (13) respecto de un cárter (14), un cubo (20) que incluye un escariado (21) formado alrededor de un segundo eje (22), girando el árbol (10) en el escariado (21), estando los dos ejes (13, 22) paralelos y formando una distancia entre los ejes una excentricidad (E), al menos dos pistones (23, 24, 25) susceptibles de desplazarse cada uno en un alojamiento (26, 27, 28) radial del árbol (10), garantizando los alojamientos el guiado de los pistones (23, 24, 25), apoyándose los pistones (26, 27, 28) en el escariado (21), arrastrando el desplazamiento de los pistones (26, 27, 28, 32, 33, 34, 35) un fluido hidráulico en dos ranuras (40, 41) anulares del cárter (14), estando las ranuras (40, 41) dispuestas en forma de arco de circunferencia alrededor del primer eje (13), siendo la energía hidráulica generada por una diferencia de presión del fluido presente entre las dos ranuras (40, 41), caracterizado porque el cubo (20) es móvil en traslación según un tercer eje (46) perpendicular a los dos primeros ejes (13, 22) para modificar el valor de la excentricidad (E) entre dos valores extremos, siendo uno positivo y el otro negativo de manera a permitir una inversión de las presiones de fluido en las ranuras (40, 41)a la vez que se conserva un mismo sentido de rotación para el árbol (10). 2.- Conversor de energía según la reivindicación 1, caracterizado porque el pistón tiene la forma de una bola (32 a 35) cuyo diámetro se ajusta con un diámetro interior del cilindro correspondiente. 3.- Conversor de energía según cualquiera de las reivindicaciones anteriores, caracterizado porque comprende varios pistones (26, 27, 28, 32, 33, 34, 35) distribuidos al tresbolillo alrededor del primer eje (13). 4.- Conversor de energía según cualquiera de las reivindicaciones anteriores, caracterizado porque el cubo (20) forma un anillo interior de un rodamiento (36), siendo un anillo exterior (47) del rodamiento (36) solidario a un carro (48) susceptible de desplazarse según el tercer eje (46) para modificar el valor de la excentricidad (E). 5.- Conversor de energía según cualquiera de las reivindicaciones anteriores, caracterizado porque comprende una válvula (55) que acciona el desplazamiento del carro (48) mediante la diferencia de presión del fluido que existe entre las dos ranuras (40, 41). 6.- Conversor de energía según la reivindicación 5, caracterizado porque comprende dos cámaras (52, 53) situadas respectivamente por una y otra parte del carro (48), conteniendo cada una de las cámaras (52, 53) el fluido, permitiendo una presión diferencial del fluido entre las dos cámaras (52, 53) desplazar el carro (48) para modificar la excentricidad (E) del conversor, y porque el conversor comprende medios para que, cuando la presión de fluido está equilibrado entre las cámaras (52, 53), la excentricidad (E) del conversor no sea nula. 7.- Conversor de energía según cualquiera de las reivindicaciones 5 o 6, caracterizado porque la válvula (55) se realiza en el carro (48). 8.- Conversor de energía según cualquiera de las reivindicaciones 5 a 7, caracterizado porque el conversor incluye medios para determinar la aceleración del caudal del conversor a partir del mando de la válvula (55). 9.- Conversor de energía según cualquiera de las reivindicaciones 5 a 8, caracterizado porque el conversor incluye un distribuidor (75, 120) para hacer comunicar una entrada de alta presión (P) de la válvula (55) con la ranura (40, 41) en la cual la presión del fluido es la más fuerte y para hacer comunicar una entrada de baja presión (T) de la válvula (55) con la ranura (40, 41) en la cual la presión del fluido es la más baja. 10- Conversor de energía según cualquiera de las reivindicaciones 5 a 9, caracterizado porque el distribuidor (75, 120) comprende medios para que cuando abandona una posición central (75a, 120a), la ranura (40, 41) cuya presión es la más baja se conecta a un espacio hidráulico interior (82) que recupera fugas internas del conversor mientras los canales que alimentan la carga (76) permanecen obturados por el distribuidor (75). 11.- Conversor de energía según cualquiera de las reivindicaciones anteriores, caracterizado porque incluye medios (121) para acumular energía hidráulica en un depósito a presión (119). 12.- Conversor de energía según cualquiera de las reivindicaciones anteriores, caracterizado porque el desplazamiento de los pistones (26, 27, 28, 32, 33, 34, 35) arrastra el fluido hidráulico en los canales (29, 30) realizados en el árbol (10), y porque los canales (29, 30) comunican alternativamente con cada una de las ranuras (40, 41) del cárter (14). 13.- Conversor de energía según cualquiera de las reivindicaciones anteriores, caracterizado porque el alojamiento es un cilindro (26, 27, 28). 14.- Robot que comprende varias conexiones independientes movidas por energía hidráulica, caracterizado porque comprende, además, tantos conversores según una cualquier de las reivindicaciones anteriores como 11 E09724364 07-10-2011 conexiones independientes, estando cada conversor asociado a una conexión. 15.- Robot según la reivindicación 14 que implementa un conversor según la reivindicación 11, caracterizado porque el depósito a presión (119) es común a varios conversores. 12 E09724364 07-10-2011 13 E09724364 07-10-2011 14 E09724364 07-10-2011 E09724364 07-10-2011 16 E09724364 07-10-2011 17 E09724364 07-10-2011 18 E09724364 07-10-2011 19 E09724364 07-10-2011 E09724364 07-10-2011 21 E09724364 07-10-2011 22 E09724364 07-10-2011 23 E09724364 07-10-2011 24 E09724364 07-10-2011 E09724364 07-10-2011 26 E09724364 07-10-2011 27 E09724364 07-10-2011 28 E09724364 07-10-2011 29 E09724364 07-10-2011 E09724364 07-10-2011 31 E09724364 07-10-2011
Patentes similares o relacionadas:
ACCIONAMIENTO EXCENTRICO CONMUTABLE Y AGITADOR CON BOMBA DE EMBOLOS RADIALES CONECTABLE, del 1 de Abril de 2009, de EUGEN WOERNER GMBH & CO. KG: Accionamiento excéntrico conmutable con un árbol de excéntrica , presentando el árbol de excéntrica un tramo excéntrico situado […]
MOTO-BOMBA PARA EL APROVECHAMIENTO DE LA ENERGÍA DE UNA O VARIAS FUENTES ENERGÉTICAS DE POTENCIA CONSTANTE O VARIABLE, PARA BOMBEAR FLUIDOS A PRESIÓN CONSTANTE PREFIJADA Y PARA GENERACIÓN ELÉCTRICA, del 20 de Febrero de 2020, de ROTARY WAVE S.L: Moto-bomba para el aprovechamiento de energía de fuentes energéticas, para bombear fluidos a presión y para generación eléctrica,provista de un eje rotatorio , […]
Desfasador de distribuidor para motobomba hidráulica, del 10 de Abril de 2019, de RABHI, VIANNEY: Motobomba hidráulica que comprende un desfasador de distribuidor comprendiendo la indicada motobomba hidráulica un bastidor de motobomba por una parte, y un […]
Motobomba hidráulica de cilindrada fija o variable, del 7 de Diciembre de 2016, de RABHI, VIANNEY: Motobomba hidráulica de cilindrada fija o variable, que comprende:
* Al menos un rotor central de motobomba que incluye una toma de fuerza de rotor […]
Manguito de estanquidad para distribuidor de bomba hidráulica, del 3 de Agosto de 2016, de RABHI, VIANNEY: Bomba hidráulica que comprende un distribuidor hidráulico y un manguito de estanquidad, comprendiendo dicho distribuidor al menos una cara de distribución […]
Utilizamos cookies para mejorar nuestros servicios y mostrarle publicidad relevante. Si continua navegando, consideramos que acepta su uso. Puede obtener más información aquí. .
 ACCIONAMIENTO EXCENTRICO CONMUTABLE Y AGITADOR CON BOMBA DE EMBOLOS RADIALES CONECTABLE, del 1 de Abril de 2009, de EUGEN WOERNER GMBH & CO. KG: Accionamiento excéntrico conmutable con un árbol de excéntrica , presentando el árbol de excéntrica un tramo excéntrico situado […]
ACCIONAMIENTO EXCENTRICO CONMUTABLE Y AGITADOR CON BOMBA DE EMBOLOS RADIALES CONECTABLE, del 1 de Abril de 2009, de EUGEN WOERNER GMBH & CO. KG: Accionamiento excéntrico conmutable con un árbol de excéntrica , presentando el árbol de excéntrica un tramo excéntrico situado […]