Método y dispositivo para ayudar al conductor de un vehículo a identificar obstáculos con sensores de ultrasonidos.
Un método para ayudar al conductor de un vehículo, especialmente un vehículo industrial o comercial,
en la identificación de obstáculos, comprendiendo el vehículo:
- indicador de señal de giro;
-un primer conjunto de sensores de ultrasonidos (1), situado en la llanta de la carcasa de la rueda delantera en el lado visible, diseñado para controlar el área alrededor de la parte lateral delantera del vehículo;
-un segundo conjunto de sensores de ultrasonidos (3), en el parachoques delantero del vehículo, diseñado para controlar el área en la parte delantera del vehículo; el método se caracteriza por que comprende
-disponer al menos un sensor de ultrasonidos (2) en la esquina delantera en el lado visible del vehículo, diseñado para controlar el denominado "punto ciego" de manera que los sensores se colocan dentro de orificios adecuados y se fijan de modo que se orientan hacia el exterior de modo que puedan controlar el área alrededor de la parte delantera y lateral delantera del vehículo, con una cobertura continua, sin interrupciones; aplicando además el método tres modos de control independientes:
- un primer modo de control que cubre el área en la parte delantera del vehículo, hasta una primera distancia dada desde el vehículo, activando dicho primer conjunto de sensores (1), después de que el vehículo ha estado parado durante un tiempo, para comparar la situación con el vehículo en un punto muerto con la situación posterior cuando se está en movimiento, y para señalar un riesgo si, cuando el vehículo comienza a alejarse, se identifica un objeto dentro de dicha primera distancia que no estaba presente cuando el vehículo estaba parado;
- un segundo modo de control, que abarca tanto las áreas alrededor de la parte delantera como lateral delantera del vehículo, dentro de dicha primera distancia desde el vehículo, que activa a todos dichos sensores (1, 2, 3) si un indicador de señal de giro se habilita para la dirección correspondiente a la cara visible del vehículo después de un periodo de tiempo cuando el vehículo estaba en un punto muerto, para comparar la situación con el vehículo en un punto muerto con la situación posterior cuando se está en movimiento, y para señalar un riesgo si un objeto se identifica dentro de dicha primera distancia cuando el vehículo está en movimiento que no estaba presente cuando el vehículo estaba parado;
-un tercer modo de control que cubre el área alrededor de la parte delantera y lateral delantera del vehículo, al menos dentro de una segunda distancia desde el vehículo que es más estrecha que dicha primera distancia, que activa a todos dichos sensores (1, 2, 3) siempre y cuando el vehículo se mueva a una velocidad inferior a un umbral dado, y señala un riesgo si un objeto entra dentro de dicha al menos una segunda distancia.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E08425555.
Solicitante: IVECO S.P.A..
Nacionalidad solicitante: Italia.
Dirección: VIA PUGLIA 35 10156 TORINO ITALIA.
Inventor/es: Vada,Maurizio.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B60R21/0134 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B60 VEHICULOS EN GENERAL. › B60R VEHICULOS, EQUIPOS O PARTES DE VEHICULOS, NO PREVISTOS EN OTRO LUGAR (prevención, limitación o extinción de incendios especialmente adaptadas a los vehículos A62C 3/07). › B60R 21/00 Disposiciones o equipamientos sobre los vehículos para proteger a los ocupantes o a los peatones o para evitar ser dañados en caso de accidente o de otros riesgos de la circulación (cinturones o arneses de seguridad en los vehículos B60R 22/00; asientos construidos para proteger al ocupante de los efectos de las fuerzas de aceleración anormales, p. ej. asientos anticolisión o asientos de seguridad, B60N 2/42; disposiciones para absorber la energía en los volantes de dirección de vehículos B62D 1/11; disposiciones para absorber la energía en las columnas de dirección de vehículos B62D 1/19). › en respuesta a un contacto inminente con un obstáculo.
PDF original: ES-2383469_T3.pdf
Fragmento de la descripción:
Método y dispositivo para ayudar al conductor de un vehículo a identificar obstáculos con sensores de ultrasonidos
5 Campo de la invención
La presente invención se refiere a un método y un dispositivo para ayudar al conductor de un vehículo, especialmente un vehículo industrial o comercial, en la identificación de obstáculos cercanos con sensores de ultrasonidos.
Estado de la técnica
Se conocen soluciones tecnológicas para ayudar al conductor de un vehículo en la identificación de obstáculos por medio de sensores de ultrasonidos.
Estas soluciones no son del todo eficaces en todas las situaciones posibles en las que se presentan obstáculos, por ejemplo, es posible que no distingan entre una situación de riesgo real y una de ningún riesgo, o no pueden proporcionar una cobertura eficaz en una amplia área de la parte delantera y lateral del vehículo.
Un ejemplo se da en el documento US20080119993, cuyas características están en el preámbulo de la reivindicación 1. Otro ejemplo se proporciona en el documento EP 0 574 925 A2.
El objeto de la presente invención es, por lo tanto, indicar un método y un dispositivo para ayudar al conductor de un vehículo, especialmente un vehículo industrial o comercial, en la identificación de obstáculos cercanos con sensores de ultrasonidos, diseñados para superar todos los inconvenientes anteriormente mencionados.
Un objeto de la presente invención es un método para ayudar al conductor de un vehículo, especialmente un vehículo industrial o comercial, en la identificación de cualquier obstáculo, de acuerdo con la reivindicación 1.
Un objeto particular de la presente invención es un método y un dispositivo para ayudar al conductor de un vehículo, especialmente un vehículo industrial o comercial, en la identificación de obstáculos cercanos con sensores de ultrasonidos, como se describe con más detalle en las reivindicaciones adjuntas que forman una parte integrante de la presente descripción.
Breve descripción de las figuras
Otros objetos y ventajas de la presente invención se harán evidentes a partir de la descripción detallada que sigue una realización de la invención (y variantes de la misma) y de los dibujos adjuntos, proporcionados como un ejemplo no limitativo, en los que:
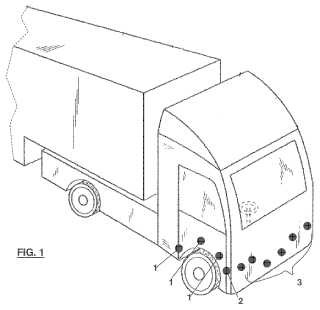
La Figura 1 es una ilustración esquemática de un vehículo equipado con sensores de ultrasonidos de acuerdo con la invención; Las figuras 2, 3 y 4 muestran diagramas del principio de funcionamiento en relación con los tres modos de 45 control implementados de acuerdo con la invención.
Descripción detallada de la invención
Con referencia a la Figura 1, el vehículo está equipado con un conjunto de sensores de ultrasonidos. Es de conocimiento común que estos sensores son capaces de establecer la distancia de un objeto encontrado por las ondas de ultrasonido que son reflejadas por los objetos y que regresan a los sensores.
En particular, los sensores de ultrasonidos 1 se disponen a lo largo de la llanta de la carcasa de la rueda delantera en el lado visible (en el lado derecho, por ejemplo) , para controlar el área alrededor de la parte lateral 55 delantera del vehículo.
Otro grupo de sensores de ultrasonidos 3 se instala a lo largo del parachoques delantero, diseñado para controlar el área en la parte delantera del vehículo.
Además, se instala al menos un sensor de ultrasonidos 2 en la esquina delantera en el lado visible del vehículo correspondiente al denominado "punto ciego".
Los sensores de ultrasonidos, de un tipo conocido, se colocan dentro de orificios adecuados y de fijan de modo que se orientan hacia el exterior, a ras con la superficie de la carrocería del vehículo, a fin de aprovechar 65 plenamente el ángulo de abertura del haz de ultrasonidos. [0014] En una, realización no limitativa, los sensores están espaciados horizontalmente no más de 40 cm entre sí, para evitar cualquier hueco en el haz, mientras que su altura desde el suelo puede ser de hasta aproximadamente 50 cm de modo que el haz de ultrasonidos alcanza el nivel del suelo en una corta distancia desde los contornos del vehículo.
[0015] Por ejemplo, puede haber seis sensores de ultrasonidos 3 en la parte delantera, y tres sensores 1 en la carcasa de la rueda en el lado visible, además de un sensor 2. La disposición física de los sensores es por tanto ideal para asegurar un control de las áreas alrededor de la parte delantera y lateral delantera del vehículo, con una cobertura continua, sin interrupciones.
Una unidad de control en el interior del vehículo recibe las señales procedentes de cada sensor a través de una conexión cableada o inalámbrica.
La unidad de control en el interior del vehículo recibe y utiliza también otras señales ya disponibles, tales como una indicación de la velocidad del vehículo, el uso del indicador de giro, y la señal que viene del acelerador.
En el interior del vehículo, existen también al menos dos señales acústicas separadas (zumbadores) , una para señalizar los obstáculos en la parte delantera, y una para los obstáculos laterales, situados respectivamente en una posición delantera y lateral con el fin de orientar al conductor, quien se percata de la posición real del obstáculo a partir de la dirección desde la que se origina el sonido.
Las dos señales acústicas pueden tener dos frecuencias de emisión diferentes y un tono variable, por ejemplo, que aumente en frecuencia a medida que el vehículo se acerca al obstáculo.
Las Figuras 2, 3 y 4 ilustran la estrategia de control, que está diseñada no sólo para alertar al conductor de la 25 presencia de un obstáculo, sino también para permitirle al conductor decidir si presenta un riesgo o no.
La estrategia incluye tres modos de control independientes.
Modo 1 (Figura 2)
El primer modo de control tiene efecto sobre la parte delantera del vehículo, y hasta una distancia de 1, 8 m desde los contornos del vehículo, activando el conjunto de sensores 3.
Se parte de una condición en la que se comprueba que el vehículo ha estado parado durante al menos un segundo. A intervalos regulares, registra una "instantánea" de la situación en el haz de ultrasonidos 5 que cubre el área delantera, identificando la presencia de cualquier obstáculo 6. A la salida del vehículo, una condición reconocida por el procesamiento de la señal de la presión ejercida sobre el acelerador, el sistema compara la situación pasada, cuando el vehículo se encontraba en un punto muerto con la situación siguiente con el vehículo en movimiento, identificando cualquier diferencia entre las dos imágenes. Si un obstáculo 6 no estaba allí cuando el vehículo estaba parado, pero que entra posteriormente en el haz de ultrasonido cuando el vehículo se aleja, el sistema reconoce un riesgo.
Si las imágenes cambian mientras que el vehículo se encuentra todavía parado, entonces la situación no se identifica como un riesgo. Si el obstáculo ya estaba allí cuando el vehículo estaba en un punto muerto y permanece 45 en su lugar cuando el vehículo se aleja, el sistema no reacciona, porque el conductor presuntamente ya se ha percatado del riesgo.
Modo 2 (Figura 3)
El segundo modo de control es similar al primero, pero con la adición de un área de control lateral, debido a la activación de todos los sensores que sirven un área global 7 que cubre la parte delantera y lateral delantera del vehículo, en un distancia de 1, 8 m desde los contornos del vehículo, sin ningún hueco.
Una condición adicional para que se active este segundo modo de control es el uso del indicador de giro de la 55 dirección correspondiente a la cara visible del vehículo, por ejemplo, para indicar la intención del conductor para girar a la derecha. Una señal procedente de cualquier giro del volante se puede usar también como una condición de activación.
Modo 3 (Figura 4)
El tercer modo de control difiere de los dos primeros. Se utiliza cuando el vehículo está en movimiento, pero a una velocidad muy baja, por ejemplo, por debajo de un valor umbral de 10 km por hora. Un área global 8 se controla cubre la parte delantera y lateral delantera del vehículo, en una distancia máxima más estrecha desde los contornos del vehículo que en los modos de control anteriores,... [Seguir leyendo]
Reivindicaciones:
1. Un método para ayudar al conductor de un vehículo, especialmente un vehículo industrial o comercial, en la identificación de obstáculos, comprendiendo el vehículo:
- indicador de señal de giro; -un primer conjunto de sensores de ultrasonidos (1) , situado en la llanta de la carcasa de la rueda delantera en el lado visible, diseñado para controlar el área alrededor de la parte lateral delantera del vehículo; -un segundo conjunto de sensores de ultrasonidos (3) , en el parachoques delantero del vehículo, diseñado para controlar el área en la parte delantera del vehículo; el método se caracteriza por que comprende -disponer al menos un sensor de ultrasonidos (2) en la esquina delantera en el lado visible del vehículo, diseñado para controlar el denominado "punto ciego" de manera que los sensores se colocan dentro de orificios adecuados y se fijan de modo que se orientan hacia el exterior de modo que puedan controlar el área alrededor de la parte delantera y lateral delantera del vehículo, con una cobertura continua, sin interrupciones; aplicando además el método tres modos de control independientes:
- un primer modo de control que cubre el área en la parte delantera del vehículo, hasta una primera distancia dada desde el vehículo, activando dicho primer conjunto de sensores (1) , después de que el vehículo ha estado parado durante un tiempo, para comparar la situación con el vehículo en un punto muerto con la situación posterior cuando se está en movimiento, y para señalar un riesgo si, cuando el vehículo comienza a alejarse, se identifica un objeto dentro de dicha primera distancia que no estaba presente cuando el vehículo estaba parado;
- un segundo modo de control, que abarca tanto las áreas alrededor de la parte delantera como lateral delantera del vehículo, dentro de dicha primera distancia desde el vehículo, que activa a todos dichos sensores (1, 2, 3) si un indicador de señal de giro se habilita para la dirección correspondiente a la cara visible del vehículo después de un periodo de tiempo cuando el vehículo estaba en un punto muerto, para comparar la situación con el vehículo en un punto muerto con la situación posterior cuando se está en movimiento, y para señalar un riesgo si un objeto se identifica dentro de dicha primera distancia cuando el vehículo está en movimiento que no estaba presente cuando el vehículo estaba parado; -un tercer modo de control que cubre el área alrededor de la parte delantera y lateral delantera del vehículo, al menos dentro de una segunda distancia desde el vehículo que es más estrecha que dicha primera distancia, que activa a todos dichos sensores (1, 2, 3) siempre y cuando el vehículo se mueva a una velocidad inferior a un umbral dado, y señala un riesgo si un objeto entra dentro de dicha al menos una segunda distancia.
2. Un método para ayudar al conductor de un vehículo de acuerdo con la reivindicación 1, en el que no se identifica ningún riesgo mientras el vehículo está parado.
3. Un método para ayudar al conductor de un vehículo de acuerdo con la reivindicación 1, en el que dichas señales de riesgos se proporcionan en forma de señales acústicas dentro de la cabina del conductor en el vehículo, difiriendo posiblemente en frecuencia y tono de acuerdo con el modo de control que se está aplicando.
4. Un dispositivo para ayudar al conductor de un vehículo, especialmente un vehículo industrial o comercial, en la identificación obstáculos, que comprende
- un primer conjunto de sensores de ultrasonidos (1) , situados en la llanta de la carcasa de la rueda delantera en el lado visible, diseñado para controlar el área alrededor de la parte lateral delantera del vehículo; -un segundo conjunto de sensores de ultrasonidos (3) , en el parachoques delantero del vehículo, diseñado para controlar el área en la parte delantera del vehículo; y caracterizado por que comprende
55 -al menos un sensor de ultrasonidos (2) en la esquina delantera en el lado visible del vehículo, diseñado para controlar el denominado "punto ciego" de manera que los sensores están dispuestos de modo que puedan controlar el área alrededor de la parte delantera y lateral delantera del vehículo, con una cobertura continua, sin interrupciones; -una unidad de control configurada para la aplicación de los modos de control de acuerdo con la reivindicación 1.
5. Un dispositivo de acuerdo con la reivindicación 4, en el que dicha unidad de control ya está instalada en un vehículo.
65 6. Un programa de ordenador que comprende medios de codificación del programa adecuados para la aplicación de las etapas de las reivindicaciones 1 a 4 en relación con dichos modos de control, cuando dicho programa se ejecuta en un ordenador.
7. Medios adecuados para la lectura con un ordenador que comprende un programa registrado, dichos medios adecuados para la lectura con un ordenador que comprende medios de codificación del programa adecuados para la aplicación de las etapas de las reivindicaciones 1 a 4 en relación con dichos modos de control, cuando dicho programa se ejecuta en un ordenador.
Patentes similares o relacionadas:
Sistema de bloqueo automático de puertas para vehículos, del 18 de Febrero de 2020, de HUESCA ALBERT, Manuel: 1. Sistema de bloqueo automático de puertas para vehículos, caracterizado por incorporar en la parte lateral derecha e izquierda, sensores de detección de movimiento/proximidad […]
Sistema de protección del peatón para contacto con el capó de vehículos, del 28 de Octubre de 2019, de Thunder Power New Energy Vehicle Development Company Limited: Un sistema de protección para peatones, que comprende: - al menos un primer sensor configurado para generar una primera señal que indique una condición […]
Método y dispositivo para impedir o disminuir el riesgo de una lesión en los ocupantes de un vehículo en el caso de una colisión por alcance, del 15 de Mayo de 2019, de Hochschule Kaiserslautern University of Applied Sciences: Método para evitar o disminuir el riesgo de lesión para los ocupantes de un vehículo en el caso de una colisión por alcance con los siguientes pasos de método: […]
Sistema de protección de peatón y vehículo, del 3 de Abril de 2019, de Thunder Power New Energy Vehicle Development Company Limited: Un sistema de protección de peatón y vehículo, que comprende: un primer sensor configurado para generar una primera señal que indica una primera condición de […]
DISPOSITIVO DE SEGURIDAD PARA PUERTAS DE VEHÍCULOS AUTOMÓVILES, del 6 de Diciembre de 2018, de VICENTE MARTINEZ, Antonino: Dispositivo de seguridad para puertas de vehículos automóviles, que mcomprende, al menos, un sensor/detector de movimiento , instalado en el […]
Procedimiento para el control de un tensor de cinturón reversible de un cinturón de seguridad en un vehículo de motor, del 9 de Agosto de 2017, de AUDI AG: Procedimiento para el control de un tensor de cinturón reversible de un cinturón de seguridad en un vehículo de motor mediante - detección de un desarrollo […]
Instalación de seguridad para un vehículo de motor y procedimiento de manejo correspondiente, del 28 de Diciembre de 2016, de AUDI AG: Instalación de seguridad para un vehículo de motor , con al menos un sensor , el cual está configurado para detectar un choque inminente o una colisión inminente […]
Procedimiento y dispositivo para determinar la plausibilidad en un sistema sensorial predictivo, del 4 de Mayo de 2016, de ROBERT BOSCH GMBH: Procedimiento para determinar la plausibilidad en un sistema sensorial predictivo de un vehículo , que comprende el paso siguiente: determinación de plausibilidad […]