Procedimiento de corrección automática de trayectoria.
Procedimiento de corrección automática de la trayectoria de un vehículo (2),
incorporando dicho vehículo un dispositivo ESP (4), que comprende:
- una etapa de determinación de una medida de guiñada (6),
- una etapa de comparación de la medida de guiñada con un valor umbral (9),
- una etapa de estimación de un valor de deriva (14);
que se caracteriza porque comprende:
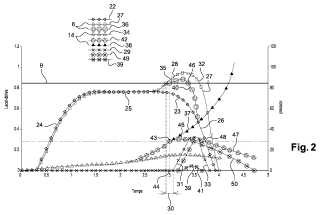
- una etapa de determinación de un valor de deriva inicial (43), que corresponde a la deriva (42) en un momento (44) en el que la guiñada real (36) supera el valor umbral (9),
- una etapa de comparación entre la deriva y la deriva inicial,
- una etapa de reacción de frenado que corresponde a un aumento de la presión (29) hidráulica en los sistemas hidráulicos de frenado, realizándose la reacción de frenado en función de la guiñada y de la deriva,
- una etapa de mantenimiento de la reacción de frenado en función de la deriva (42) únicamente si la guiñada real (36) disminuye por debajo del valor umbral (9).
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E09172225.
Solicitante: ROBERT BOSCH GMBH.
Nacionalidad solicitante: Alemania.
Dirección: WERNERSTRASSE 1 70442 STUTTGART ALEMANIA.
Inventor/es: BOUCHARD,CHRISTOPHE.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B60T8/1755 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B60 VEHICULOS EN GENERAL. › B60T SISTEMAS DE CONTROL DE FRENOS PARA VEHICULOS O PARTES DE ESOS SISTEMAS; SISTEMAS DE CONTROL DE FRENOS O PARTES DE ESOS SISTEMAS, EN GENERAL (control de sistemas de frenado electrodinámico B60L 7/00; control conjugado de frenos y otras unidades de accionamiento de vehículos B60W ); DISPOSICION DE ELEMENTOS DE FRENADO DE VEHICULOS EN GENERAL; DISPOSITIVOS PORTATILES PARA EVITAR EL MOVIMIENTO INDESEADO DE VEHICULOS; MODIFICACIONES REALIZADAS EN VEHICULOS PARA FACILITAR LA REFRIGERACION DE LOS FRENOS. › B60T 8/00 Disposiciones para adaptar la fuerza de frenado sobre la rueda a las condiciones propias del vehículo o al estado del suelo, p. ej. por limitación o variación de la fuerza de frenado (cambiando el número de cilindros de freno en acción en el sistema de frenado B60T 17/10). › Regulación de los frenos especialmente adaptada para el control de la estabilidad del vehículo, p.ej. teniendo en cuenta el ángulo de oscilación o la aceleración transversal al tomar una curva (sistemas de control de la estabilidad dinámica de los vehículos por otra forma que controlando una subunidad particular B60W 30/02).
PDF original: ES-2379040_T3.pdf
Fragmento de la descripción:
Procedimiento de corrección automática de trayectoria La presente invención se refiere a un procedimiento de corrección automática de trayectoria. De manera más particular la invención se refiere a un procedimiento de corrección automática de la trayectoria de un vehículo durante una desviación del vehículo con respecto a una trayectoria deseada. La invención se describe para el campo del automóvil pero se puede aplicar en otros campos.
Durante la utilización de un vehículo, puede ocurrir que un conductor desee realizar un viraje y que, según las condiciones en las que este viraje se realice, el vehículo se desvíe de la trayectoria deseada. Las dos principales maneras en las que un vehículo se puede desviar de la trayectoria deseada durante un viraje se denominan sobreviraje y subviraje.
Un sobreviraje corresponde a una rotación del vehículo, alrededor de un eje vertical que pasa por su centro de gravedad, mayor que la que tiene normalmente lugar de acuerdo con la trayectoria deseada. Una rotación de este tipo corresponde a un derrape hasta quedar en sentido contrario. De manera inversa, un subviraje tiene lugar cuando el vehículo no gira los bastante con respecto a la trayectoria deseada por el conductor. De manera típica, el vehículo continúa en línea recta en aquel momento en el que debería girar.
El experto en la materia conoce varias soluciones, como las que se describen en los documentos EP 1000838, EP 0970876, DE 4305155, DE 19617590, US 6195606, US 6547343 o US 2007/244606, con el fin de evitar que el vehículo se desvíe de la trayectoria deseada o, en su defecto, para volver a esta lo más rápidamente posible. El sistema que más frecuentemente se utiliza es un sistema dinámico de control de trayectoria ESP (Electronic Stability Program en terminología anglosajona) . El sistema ESP es un sistema que permite evitar y/o corregir las inestabilidades del vehículo. Este sistema está ligado a un sistema de control de las ruedas del vehículo, en particular a un sistema de frenado.
Para poder actuar sobre el comportamiento del vehículo y para poder elaborar unos comandos que permitan al vehículo conservar o recuperar la trayectoria deseada por el conductor, el sistema ESP debe utilizar un gran número de datos. Estos datos se refieren tanto a las características como al comportamiento del vehículo.
Para obtener estos datos, el vehículo está equipado con diferentes sensores. De este modo encontramos en particular los sensores de velocidad de las ruedas, el sensor de aceleración lateral, el sensor de guiñada y/o el sensor de rotación del eje de la dirección. A partir de estos datos, el sistema ESP realiza unos cálculos que permiten determinar si existe una diferencia entre, por un lado, la trayectoria deseada por el conductor y, por otro lado, la trayectoria real del vehículo. El sistema ESP define unas órdenes que el sistema de frenado tiene que aplicar una vez realizados estos cálculos.
Para determinar si existe una diferencia entre la trayectoria deseada y la trayectoria real, los sistemas ESP actuales utilizan una medida de guiñada del vehículo. La medida de guiñada del vehículo corresponde a la rotación del vehículo alrededor de un eje vertical que pasa por el centro de gravedad del vehículo. De este modo se puede determinar una medida de guiñada teórica con respecto a la trayectoria deseada. La trayectoria deseada por el conductor viene determinada por diferentes parámetros. Los principales parámetros que determinan la trayectoria 45 deseada son el ángulo de rotación del volante, la velocidad del vehículo, así como las características técnicas del vehículo. De este modo, cada trayectoria deseada corresponde a una medida de guiñada teórica particular.
Durante un viraje, la medida de guiñada presenta varias tendencias. Esta medida de guiñada aumenta en la entrada del viraje, permanece estable durante el viraje, y disminuye hasta volver a un valor nulo a la salida del viraje. Durante un sobreviraje, la guiñada aumenta más que si el vehículo tuviera la trayectoria deseada. Por el contrario, en un subviraje la guiñada no aumenta tanto como si el vehículo tuviera la trayectoria deseada.
Los sistemas ESP actuales controlan que el vehículo no se desvíe de la trayectoria deseada observando una guiñada real medida por un sensor. Esta guiñada real se compara con la guiñada teórica con el fin de determinar si 55 existe o no una diferencia entre la trayectoria deseada y la trayectoria real del vehículo. Si la guiñada real es superior a la guiñada teórica, los sistemas ESP actuales detectan un sobreviraje. De manera inversa, si la guiñada medida es inferior a la guiñada teórica, los sistemas ESP actuales detectan un subviraje.
La corrección que realiza el sistema ESP se traduce en un ascenso de la presión hidráulica en el sistema de frenado de una o de varias ruedas, es decir un frenado de una o de varias ruedas. Este ascenso de la presión es independiente de las acciones del conductor sobre el sistema de frenado del vehículo. No obstante, conviene que el sistema ESP no intervenga más que en los casos absolutamente necesarios en los que el conductor no podrá corregir la situación en la que se encuentra el vehículo sin actuar él mismo sobre los frenos. Es preciso, por lo tanto, que se defina un umbral de intervención del sistema ESP de manera adaptada al vehículo para un conductor tipo. Si 65 esta guiñada supera ese umbral durante un sobreviraje, el sistema realiza un frenado únicamente en las ruedas exteriores del vehículo. Este frenado en las ruedas exteriores produce una fuerza de rotación inversa a la de la guiñada que tiene lugar durante los sobrevirajes con el fin de volver a poner al vehículo en la trayectoria deseada. De manera inversa, durante un subviraje, se realiza un frenado en las ruedas interiores del vehículo para volver a poner a dicho vehículo en la trayectoria deseada.
Sin embargo, una solución de este tipo no es segura. En efecto, para determinar la trayectoria real del vehículo, es necesario conocer la medida de la guiñada, pero también es necesario conocer una deriva del vehículo. La deriva en un punto del vehículo corresponde a la velocidad lateral del vehículo en ese punto dividida por la velocidad longitudinal del vehículo en ese punto. La deriva del vehículo se estima, de hecho, a partir de un vehículo tipo, de manera habitual una tabla de datos que integra los diferentes valores de deriva posibles según las situaciones. Cuando la guiñada aumenta hasta superar el valor umbral, pero la deriva estimada sobre el eje trasero también aumenta, el vehículo realiza un movimiento lateral, o una ovalización de su trayectoria. Las ruedas traseras están entonces más alejadas de la trayectoria deseada que las ruedas delanteras. Esta diferencia entre las ruedas delanteras y las ruedas traseras puede tener lugar a pesar de una guiñada medida que se corresponda con la guiñada de la trayectoria deseada.
Durante la ovalización de la trayectoria, un sistema ESP clásico corrige la guiñada ordenando un ascenso de la presión del grupo hidráulico de frenado en las ruedas exteriores. Este aumento de la presión es muy breve, representando el tiempo para que el vehículo vuelva a una guiñada que corresponde a la rotación alrededor del eje vertical que pasa por el centro de gravedad de la trayectoria deseada. De este modo, en el momento en que la medida de guiñada del vehículo vuelve a descender por debajo del valor umbral, el sistema ESP detiene el frenado en las ruedas exteriores. Sin embargo, si la guiñada medida corresponde a la guiñada de la trayectoria deseada, la deriva del eje trasero ha provocado una ovalización de la trayectoria real, como el vehículo que se desplaza lateralmente alejándose de la trayectoria deseada. En una situación de este tipo, un sistema ESP clásico no es, por lo tanto, capaz de corregir la trayectoria que toma el coche.
Para dar solución a este problema, la invención prevé no tomar en cuenta solo la guiñada del vehículo para analizar la desviación del vehículo de la trayectoria deseada. El procedimiento de acuerdo con la invención prevé, si la guiñada real supera el valor umbral, activar la corrección clásica prevista por el sistema ESP, es decir, un ascenso de la presión del grupo hidráulico de frenado en las ruedas exteriores, pero verificando de manera simultánea el valor de la deriva. De manera más particular, el procedimiento de acuerdo con la invención prevé vigilar la deriva a partir del momento en el que la guiñada supera el valor de umbral. Un incremento de la deriva tras el rebasamiento... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento de corrección automática de la trayectoria de un vehículo (2) , incorporando dicho vehículo un dispositivo ESP (4) , que comprende: 5
- una etapa de determinación de una medida de guiñada (6) ,
- una etapa de comparación de la medida de guiñada con un valor umbral (9) ,
- una etapa de estimación de un valor de deriva (14) ; que se caracteriza porque comprende:
- una etapa de determinación de un valor de deriva inicial (43) , que corresponde a la deriva (42) en un momento (44) 15 en el que la guiñada real (36) supera el valor umbral (9) ,
- una etapa de comparación entre la deriva y la deriva inicial,
- una etapa de reacción de frenado que corresponde a un aumento de la presión (29) hidráulica en los sistemas 20 hidráulicos de frenado, realizándose la reacción de frenado en función de la guiñada y de la deriva,
- una etapa de mantenimiento de la reacción de frenado en función de la deriva (42) únicamente si la guiñada real
(36) disminuye por debajo del valor umbral (9) .
2. Procedimiento de acuerdo con la reivindicación 1, que se caracteriza porque, cuando la guiñada es superior al valor umbral y cuando la deriva es inferior a la deriva inicial, la reacción de frenado se basa en la diferencia entre la medida de la guiñada en curso y el valor umbral.
3. Procedimiento de acuerdo con una de las reivindicaciones 1 a 2, que se caracteriza porque, cuando la guiñada es superior al valor umbral y cuando la deriva es superior a la deriva inicial, la reacción de frenado es función de la diferencia entre la deriva y la deriva inicial y de la diferencia entre la guiñada y el valor umbral.
4. Procedimiento de acuerdo con una de las reivindicaciones 1 a 3, que se caracteriza porque, cuando la guiñada vuelve a disminuir (46) por debajo del valor umbral, si la deriva es superior o igual a la deriva inicial, la reacción de 35 frenado es función de la diferencia entre la deriva y la deriva inicial.
5. Procedimiento de acuerdo con una de las reivindicaciones 1 a 4, que se caracteriza porque el final de la reacción de frenado, cuando la guiñada vuelve a estar por debajo del valor umbral y cuando la deriva es inferior a la deriva inicial, es progresivo hasta el momento en que dicha reacción de frenado sea nula.
Patentes similares o relacionadas:
Dispositivo de control de frenado y vehículo del tipo de montar a horcajadas que lo comprende, del 13 de Noviembre de 2019, de YAMAHA HATSUDOKI KABUSHIKI KAISHA: Un dispositivo de control de frenado para un vehículo del tipo de montar a horcajadas que tiene una primera rueda , que comprende: un primer dispositivo […]
 Sistema de freno y procedimiento de frenado para un freno de fricción no lineal de accionamiento eléctrico, del 2 de Enero de 2019, de VE Vienna Engineering Forschungs- und Entwicklungs GmbH: Procedimiento de para accionar un freno de fricción de accionamiento eléctrico con un comportamiento no lineal de fuerza-desplazamiento, […]
Sistema de freno y procedimiento de frenado para un freno de fricción no lineal de accionamiento eléctrico, del 2 de Enero de 2019, de VE Vienna Engineering Forschungs- und Entwicklungs GmbH: Procedimiento de para accionar un freno de fricción de accionamiento eléctrico con un comportamiento no lineal de fuerza-desplazamiento, […]
Procedimiento para advertir al conductor de un vehículo de un riesgo de vuelco y dispositivo de control con esta finalidad, del 13 de Diciembre de 2017, de WABCO GMBH: Procedimiento para advertir al conductor de un vehículo de un riesgo de vuelco del vehículo sobre su eje longitudinal, registrando un dispositivo […]
Dispositivo de control para un sistema de frenado de un vehículo, sistema de frenado para un vehículo y método para operar un sistema de frenado de un vehículo, del 9 de Agosto de 2017, de ROBERT BOSCH GMBH: 1. Dispositivo de control para un sistema de frenado de un vehículo, con un aparato de control , mediante el cual el sistema de […]
Procedimiento de frenado automático de un vehículo automóvil, del 12 de Julio de 2017, de PSA Automobiles SA: Procedimiento de frenado automático de un vehículo automóvil, que pone en práctica una función de gestión de la dinámica longitudinal del vehículo , […]
Dispositivo de control de freno escalonado para reventón de neumático de vehículo y método de control del mismo, del 18 de Enero de 2017, de Zhejiang Geely Automobile Research Institute Co., Ltd: Un dispositivo de control de freno escalonado para reventón de neumático de vehículo, incluyendo un sensor de presión de neumático para detectar un […]
Procedimiento y dispositivo para estabilizar la marcha de un remolque que se mueve a bandazos, del 21 de Septiembre de 2016, de AUDI AG: Procedimiento para estabilizar la marcha de un remolque que se mueve a bandazos arrastrado por un vehículo, en el que se frena automáticamente […]
Procedimiento y sistema de frenado para el control de estabilidad de un vehículo, del 13 de Julio de 2016, de CONTINENTAL TEVES AG & CO. OHG: Procedimiento en el que se regula la estabilidad de conducción de un vehículo, en donde se influye sobre una diferencia de tasa de derrape por medio de un momento […]