APARATO DE GUIADO MICROMÉTRICO MOTORIZADO PARA LA CAPTACIÓN Y EL DIRECCIONAMIENTO PRECISO DE HACES LÁSER EN EL ESPACIO LIBRE.
Aparato de guiado micrométrico motorizado para la captación y el direccionamiento preciso de haces láser en el espacio libre,
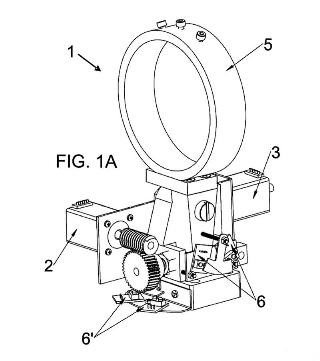
formada por un soporte móvil que permite alojar un sistema óptico que contiene un reflector catadióptrico que recibe luz en su plano focal y un colimador que concentra a un haz láser para ser transmitido. La estructura mecánica contiene una disposición de engranajes que permiten el movimiento micrométrico con dos grados de libertad, uno acimutal y otro de elevación del soporte, que aloja al sistema óptico. El movimiento angular se realiza con una precisión del microradián. La estructura electrónica consta de dos motores (2, 3) paso a paso que pueden girar mediante saltos variables y cuyos ejes mueven engranajes reductores de la estructura mecánica. También contiene cuatro sensores electroópticos (6, 6') que permiten detectar los fines de carrera en los movimientos de acimut y elevación.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201001622.
Solicitante: UNIVERSIDAD DE MALAGA.
Nacionalidad solicitante: España.
Inventor/es: ROMERO SANCHEZ,JORGE, FERNANDEZ RAMOS,RAQUEL, MARTIN CANALES,JOSE FRANCISCO, RIOS GÓMEZ,FRANCISCO JAVIER, MARÍN MARTÍN,FRANCISCO JAVIER.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- F16M11/12 MECANICA; ILUMINACION; CALEFACCION; ARMAMENTO; VOLADURA. › F16 ELEMENTOS O CONJUNTOS DE TECNOLOGIA; MEDIDAS GENERALES PARA ASEGURAR EL BUEN FUNCIONAMIENTO DE LAS MAQUINAS O INSTALACIONES; AISLAMIENTO TERMICO EN GENERAL. › F16M BASTIDORES, CARCASAS O BANCADAS PARA MOTORES, MAQUINAS O APARATOS, NO ESPECIFICOS PARA MOTORES, MAQUINAS O APARATOS PREVISTOS EN OTRO LUGAR; APOYOS; SOPORTES. › F16M 11/00 Stands o caballetes utilizados como soporte para aparatos u objetos (sin cabezas F16M 13/00; caballetes para encerados A47B 97/04; stands de exposición A47F 7/00; para trabajadores E04G 1/32; sostén, suspensión o fijación de los dispositivos de iluminación F21V 21/00; modificaciones particulares para aparatos o artículos particulares, véanse las subclases apropiadas). › en más de una dirección.
- G02B7/00 FISICA. › G02 OPTICA. › G02B ELEMENTOS, SISTEMAS O APARATOS OPTICOS (G02F tiene prioridad; elementos ópticos especialmente adaptados para ser utilizados en los dispositivos o sistemas de iluminación F21V 1/00 - F21V 13/00; instrumentos de medida, ver la subclase correspondiente de G01, p. ej. telémetros ópticos G01C; ensayos de los elementos, sistemas o aparatos ópticos G01M 11/00; gafas G02C; aparatos o disposiciones para tomar fotografías, para proyectarlas o para verlas G03B; lentes acústicas G10K 11/30; "óptica" electrónica e iónica H01J; "óptica" de rayos X H01J, H05G 1/00; elementos ópticos combinados estructuralmente con tubos de descarga eléctrica H01J 5/16, H01J 29/89, H01J 37/22; "óptica" de microondas H01Q; combinación de elementos ópticos con receptores de televisión H04N 5/72; sistemas o disposiciones ópticas en los sistemas de televisión en colores H04N 9/00; disposiciones para la calefacción especialmente adaptadas a superficies transparentes o reflectoras H05B 3/84). › Monturas, medios de regulación o uniones estancas a la luz para elementos ópticos.
Fragmento de la descripción:
Aparato de guiado micrométrico motorizado para la captación y el direccionamiento preciso de haces láser en el espacio libre.
Campo de la invención La invención presentada, se enmarca en el campo de la industria electromecánica en aplicaciones de instrumentación óptica de precisión para la focalización, direccionamiento y guiado de haces luminosos.
Antecedentes de la invención Los aparatos que permiten el movimiento angular en los planos vertical y horizontal de un soporte, en el lenguaje de la astronomía toman el nombre de sistemas altacimutales conocidos también en su acepción inglesa como “pan and tilt”, del inglés movimiento de un plano horizontal “pan” y movimiento de un plano vertical “tilt”. Estos aparatos se utilizan en campos de la óptica, la electrónica y la robótica para el soporte de cámaras de vigilancia, telescopios y otros artilugios que deban posicionarse y/o moverse en el espacio y deban apuntar hacia un punto concreto del mismo. El movimiento angular de los dos planos viene caracterizado por dos ángulos en torno a dos ejes perpendiculares de movimiento que definen una dirección del espacio en un sistema de coordenadas esféricas. El ángulo horizontal se denomina “acimut” o “longitud” y el vertical “latitud” o “elevación”.
Los aparatos “altacimutales” pueden tener los accionamientos del movimiento de los planos móviles de tipo manual o motorizado. Si son motorizados, los motores son controlados por drivers y unidades de control electrónico.
La amplitud y precisión del movimiento que poseen depende de la aplicación concreta para la que vayan a ser utilizados. Por ejemplo, si soportan cámaras de vigilancia deben presentar gran recorrido en el eje acimutal (e.g. 270º ó3π/2 radianes) , y menor recorrido en el eje de elevación (e.g. 180º ó π radianes) . Y la precisión en la dirección dependerá del campo de visión de la cámara (e.g. 60º) . En aplicaciones en las que haya que apuntar a direcciones lejanas del espacio, los recorridos suelen ser menores y la precisión mucho mayor.
En esta invención se presenta un aparato altacimutal micrométrico en las posiciones angulares para apuntar con precisión y estabilidad a direcciones del espacio que se encuentran entre 100 m y 2000 m soportando estructuras ópticas de captación (reflectores catadióptricos) y emisión (haces láser colimados) , de hasta 3 Kg de peso.
Descripción de la invención El aparato de guiado está formado por un soporte móvil que permite alojar un sistema óptico que contiene un reflector catadióptrico que recibe luz en su plano focal y un colimador que concentra a un haz láser para ser transmitido. La estructura mecánica contiene una disposición de engranajes que permiten el movimiento micrométrico con dos grados de libertad, uno acimutal y otro de elevación del soporte, que aloja al sistema óptico. El movimiento angular se realiza con una precisión del microradián. La estructura electrónica consta de dos motores paso a paso que pueden girar mediante saltos variables y cuyos ejes mueven engranajes reductores de la estructura mecánica. También contiene cuatro sensores electroópticos que permiten detectar los fines de carrera en los movimientos de acimut y elevación.
Los motores paso a paso son activados mediante un Driver y un Microcontrolador que permite programar la velocidad y la aceleración del paso bajo el estándar I2C (Inter-Integrated Circuits) en modo esclavo.
Los sensores ópticos de fin de carrera se activan mediante reflexión de luz infrarroja y están sujetos a la acción de sendos buffers que conforman flancos nivel alto, nivel bajo y una ventana angular de trabajo. Un algoritmo ejecutado por un Microcontrolador recibe las señales de éstos sensores para hacer la calibración.
La estructura y sus dimensiones permiten alojar tubos ópticos de hasta 10 cm de diámetro y soportar pesos de hasta 3 Kg.
El objeto de esta invención es el direccionamiento preciso de haces láser colimados hacia un blanco situado entre 100 m y 2000 m, a la vez que recibir otro haz similar en el mismo plano de emisión.
El aparato de guiado micrométrico comprende:
- un soporte de amarre preparado para sostener medios de comunicación óptica (preferentemente un tubo reflector catadióptrico y un transmisor láser) en el espacio libre;
- medios electromecánicos encargados de accionar el soporte de amarre, permitiendo su giro en torno a un eje de acimut y un eje de elevación de manera independiente, comprendiendo dichos medios electromecánicos:
• un motor de elevación, de tipo paso a paso, encargado de suministrar la fuerza motriz empleada para el giro del soporte de amarre en torno al eje de elevación;
• medios de transmisión de la fuerza motriz del motor de elevación encargados de producir, para cada paso del motor de elevación, un giro del soporte de amarre en torno al eje de elevación;
• un motor de acimut, de tipo paso a paso, encargado de suministrar la fuerza motriz empleada para el giro del soporte de amarre en torno al eje de acimut;
• medios de transmisión de la fuerza motriz del motor de acimut encargados de producir, para cada paso del motor de acimut, un giro del soporte de amarre en torno al eje de acimut.
En una realización preferente, los medios de transmisión de la fuerza motriz del motor de elevación comprenden:
- un tornillo sin fin de elevación que gira solidario al eje del motor de elevación;
- una corona helicoidal de elevación que engrana con el tornillo sin fin de elevación y encargada de producir el giro de un perno de elevación en torno a un eje de tracción de elevación;
- el perno de elevación, con una parte roscada;
- una tuerca de tracción de elevación roscada al perno de elevación, siendo dicha tuerca cilíndrica y con una ranura en el eje del cilindro;
- una biela de elevación, disponiendo en su extremo libre de una guía para el ajuste de la ranura de la tuerca de tracción de elevación, estando configurada dicha biela de elevación para producir el giro del soporte de amarre en torno al eje de elevación cuando se produce un desplazamiento de la tuerca de tracción de elevación.
El número de pasos por vuelta del motor de elevación, el paso de rosca del perno de elevación, el número de dientes de la corona helicoidal de elevación y la distancia de biela de elevación, definida como la distancia entre el eje de elevación y la tuerca de tracción de elevación, se configuran preferentemente de forma que para cada paso del motor de elevación el giro del soporte de amarre en torno al eje de elevación sea menor de 2 microradianes.
En una realización preferida, los medios de transmisión de la fuerza motriz del motor de acimut comprenden a su vez:
- un tornillo sin fin de acimut que gira solidario al eje del motor de acimut;
- una corona helicoidal de acimut que engrana con el tornillo sin fin de acimut y encargada de producir el giro de un perno de acimut en torno a un eje de tracción de acimut;
- el perno de acimut, con una parte roscada;
- una tuerca de tracción de acimut roscada al perno de acimut, siendo dicha tuerca cilíndrica y con una ranura en el eje del cilindro;
- una biela de acimut, disponiendo en su extremo libre de una guía para el ajuste de la ranura de la tuerca de tracción de acimut, estando configurada dicha biela de acimut para producir el giro del soporte de amarre en torno al eje de acimut cuando se produce un desplazamiento de la tuerca de tracción de acimut.
El número de pasos por vuelta del motor de acimut, el paso de rosca del perno de acimut, el número de dientes de la corona helicoidal de acimut y la distancia de biela de acimut, definida como la distancia entre el eje de acimut y la tuerca de tracción de acimut, se configuran de forma que para cada paso del motor de acimut el giro del soporte de amarre en torno al eje de acimut sea menor de 2 microradianes.
La biela de acimut está preferiblemente encargada de la sustentación de los distintos componentes del aparato de guiado micrométrico, disponiendo dicha biela de acimut de al menos un taladro para la fijación externa del aparato.
El aparato de guiado micrométrico puede comprender adicionalmente unos medios sensores fin de carrera de elevación para delimitar el giro del soporte de amarre en torno al eje de elevación y unos medios sensores fin de carrera de acimut para delimitar el giro del soporte de amarre en torno...
Reivindicaciones:
1. Aparato de guiado micrométrico motorizado para la captación y el direccionamiento preciso de haces láser en el espacio libre, caracterizado porque comprende:
- un soporte de amarre (5) preparado para sostener medios de comunicación óptica en el espacio libre;
- medios electromecánicos encargados de accionar el soporte de amarre (5) , permitiendo su giro en torno a un eje de acimut (20) y un eje de elevación (21) de manera independiente, comprendiendo dichos medios electromecánicos:
• un motor de elevación (2) , de tipo paso a paso, encargado de suministrar la fuerza motriz empleada para el giro del soporte de amarre (5) en torno al eje de elevación (21) ;
• medios de transmisión de la fuerza motriz del motor de elevación (2) encargados de producir, para cada paso del motor de elevación (2) , un giro del soporte de amarre (5) en torno al eje de elevación (21) ;
• un motor de acimut (3) , de tipo paso a paso, encargado de suministrar la fuerza motriz empleada para el giro del soporte de amarre (5) en torno al eje de acimut (20) ;
• medios de transmisión de la fuerza motriz del motor de acimut (3) encargados de producir, para cada paso del motor de acimut (3) , un giro del soporte de amarre (5) en torno al eje de acimut (20) .
2. Aparato de guiado micrométrico según la reivindicación 1, donde los medios de comunicación óptica comprenden al menos uno de los siguientes:
un tubo reflector catadióptrico 50;
un transmisor láser 51.
3. Aparato de guiado micrométrico según cualquiera de las reivindicaciones anteriores, donde los medios de transmisión de la fuerza motriz del motor de elevación (2) comprenden:
- un tornillo sin fin de elevación (12) que gira solidario al eje (22) del motor de elevación (2) ;
- una corona helicoidal de elevación (13) que engrana con el tornillo sin fin de elevación (12) y encargada de producir el giro de un perno de elevación (14) en torno a un eje de tracción de elevación (23) ;
- el perno de elevación (14) , con una parte roscada;
- una tuerca de tracción de elevación (15) roscada al perno de elevación (14) , siendo dicha tuerca cilíndrica y con una ranura en el eje del cilindro;
- una biela de elevación (16) , disponiendo en su extremo libre de una guía (19) para el ajuste de la ranura de la tuerca de tracción de elevación (15) , estando configurada dicha biela de elevación (16) para producir el giro del soporte de amarre (5) en torno al eje de elevación (21) cuando se produce un desplazamiento de la tuerca de tracción de elevación (15) .
4. Aparato de guiado micrométrico según la reivindicación 3, donde el número de pasos por vuelta del motor de elevación (2) , el paso de rosca del perno de elevación (14) , el número de dientes de la corona helicoidal de elevación
(13) y la distancia de biela de elevación, definida como la distancia entre el eje de elevación (21) y la tuerca de tracción de elevación (15) , se configuran de forma que para cada paso del motor de elevación (2) el giro del soporte de amarre
(5) en tomo al eje de elevación (21) sea menor de 2 microradianes.
5. Aparato de guiado micrométrico según cualquiera de las reivindicaciones anteriores, donde los medios de transmisión de la fuerza motriz del motor de acimut (3) comprenden:
- un tornillo sin fin de acimut (12’) que gira solidario al eje (22’) del motor de acimut (3) ;
- una corona helicoidal de acimut (13’) que engrana con el tornillo sin fin de acimut (12’) y encargada de producir el giro de un perno de acimut (14’) en torno a un eje de tracción de acimut (23’) ;
- el perno de acimut (14’) , con una parte roscada;
- una tuerca de tracción de acimut (15’) roscada al perno de acimut (14’) , siendo dicha tuerca cilíndrica y con una ranura en el eje del cilindro;
- una biela de acimut (16’) , disponiendo en su extremo libre de una guía (19’) para el ajuste de la ranura de la tuerca de tracción de acimut (15’) , estando configurada dicha biela de acimut (16’) para producir el giro del soporte de amarre (5) en torno al eje de acimut (20) cuando se produce un desplazamiento de la tuerca de tracción de acimut (15’) .
6. Aparato de guiado micrométrico según la reivindicación 5, donde el número de pasos por vuelta del motor de acimut (3) , el paso de rosca del perno de acimut (14’) , el número de dientes de la corona helicoidal de acimut (13’) y la distancia de biela de acimut, definida como la distancia entre el eje de acimut (20) y la tuerca de tracción de acimut (15’) , se configuran de forma que para cada paso del motor de acimut (3) el giro del soporte de amarre (5) en torno al eje de acimut (20) sea menor de 2 microradianes.
7. Aparato de guiado micrométrico según cualquiera de las reivindicaciones 5 a 6, donde la biela de acimut (16’) está encargada de la sustentación de los distintos componentes del aparato de guiado micrométrico (1) , disponiendo dicha biela de acimut (16’) de al menos un taladro para la fijación externa del aparato (1) .
8. Aparato de guiado micrométrico según cualquiera de las reivindicaciones anteriores, que comprende unos medios sensores fin de carrera de elevación para delimitar el giro del soporte de amarre (5) en torno al eje de elevación (21) .
9. Aparato de guiado micrométrico según cualquiera de las reivindicaciones anteriores, que comprende unos medios sensores fin de carrera de acimut para delimitar el giro del soporte de amarre (5) en torno al eje de acimut (20) .
10. Aparato de guiado micrométrico según las reivindicaciones 8 y 9, donde los medios sensores fin de carrera de elevación comprenden:
- dos sensores fin de carrera de elevación (6) electroópticos reflexivos fijados a un bastidor (17) y dispuestos sobre la biela de acimut (16’) ; y
- un espejo de fin de carrera de elevación (30) fijado a la biela de elevación (16) ;
y donde los medios sensores fin de carrera de acimut comprenden:
- dos sensores fin de carrera de acimut (6’) electroópticos reflexivos fijados a la biela de acimut (16’) ; y
- un espejo de fin de carrera de acimut (30’) fijado al bastidor (17) .
11. Aparato de guiado micrométrico según cualquiera de las reivindicaciones anteriores, que comprende un microcontrolador encargado de controlar los motores de elevación (2) y de acimut (3) .
12. Aparato de guiado micrométrico según las reivindicaciones 10 y 11, donde el microcontrolador está configurado para, mediante un proceso de calibración para compensar las holguras mecánicas y electrónicas generadas, posicionar los espejos de fin de carrera (30, 30’) en una posición de referencia centrada con respecto a los respectivos sensores fin de carrera (6, 6’) .
Patentes similares o relacionadas:
Dispositivo de ajuste de eje óptico de cámara, y cámara que lo tiene, del 27 de Mayo de 2020, de Hangzhou Hikmicro Sensing Technology Co., Ltd: Un dispositivo de ajuste de eje óptico de cámara, caracterizado porque se usa para ajustar un sistema de eje óptico de cámara y comprende: un soporte […]
Ojiva giroestabilizadora para aeronaves no tripuladas, del 23 de Abril de 2020, de UNIVERSIDAD DE EXTREMADURA: Ojiva giroestabilizadora para aeronaves no tripuladas. Ojiva giroestabilizadora que comprende un módulo de acople que puede fijarse al fuselaje y que está ensamblado mediante […]
MECANISMO ARTICULADO Y SISTEMA DE APUNTAMIENTO ARTICULADO QUE COMPRENDE ESE MECANISMO, del 23 de Abril de 2020, de Airbus Defence and Space, S.A: El mecanismo articulado comprende una primera rótula esférica , una segunda rótula esférica , una tercera rótula esférica , una primera […]
Aparato de control, cabezal de soporte que usa el mismo, y método de control de cabezal de soporte, del 16 de Enero de 2019, de SZ DJI Osmo Technology Co., Ltd: Cardán para controlar un dispositivo óptico para realizar una acción, que comprende un dispositivo de control, un conjunto de control conectado con el dispositivo […]
Plataforma estabilizada, del 20 de Septiembre de 2017, de THALES: Plataforma estabilizada que comprende: - un marco de soporte ; - una estructura portante , montada rotatoria en relación con el […]
PROYECTOR DE VIDEO CON SISTEMA DE AUDIO DE CINE EN SU CASA PARA TECHO, del 17 de Agosto de 2017, de LARA RIOS, Damián: Sistema de proyección de video y audio para cine en su casa para techo que reemplaza opcionalmente cualquier tipo de proyector de video con la ventaja […]
SISTEMA DE AUDIO Y CINE EN SU CASA PARA TECHO, del 4 de Mayo de 2017, de LARA RIOS, Damián: Sistema de audio y cine en su casa para techo que reemplaza opcionalmente cualquier tipo de equipo de diez canales que emita sonidos asociados con un video a manera de que el […]
Junta cardán flexible compacta y vehículo espacial que consta de dicha junta cardán, del 26 de Noviembre de 2014, de THALES: Junta cardán flexible compacta, que consta de un eje longitudinal central Z hueco, de dos pivotes huecos montados ortogonalmente el uno con respecto al otro […]