VEHÍCULO A MOTOR CON TRANSMISIÓN AUTOMATIZADA.
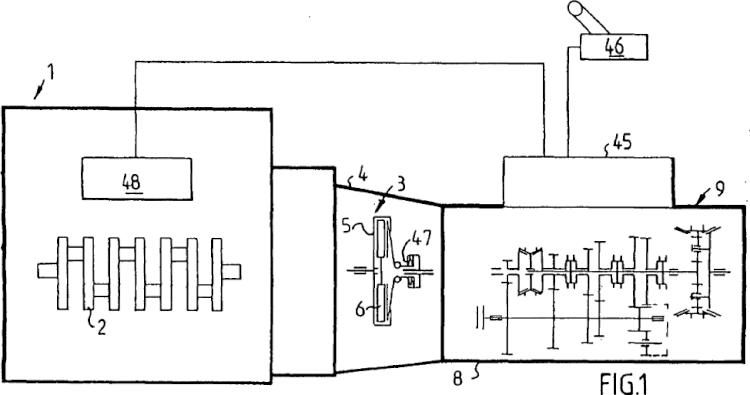
Vehículo a motor con embrague (3) y transmisión automatizada (9) entre el motor y las ruedas motrices del vehículo,
que comprende medios de control (45,48) para controlar el motor y para controlar la transmisión, de acuerdo con una posición seleccionada para un selector electrónico de velocidades (46), de manera que los medios de control co el selector de velocidad en su posición para cambio automático en el arranque o en circulación, selecciona una marcha que está determinada por una estrategia de selección de marchas almacenada en los medios de control, como función de varios parámetros facilitados a los medios de control, caracterizado porque los medios de control están adaptados para llevar a cabo, en primer lugar, un proceso de simulación relativo a la estrategia de selección de marchas, como mínimo, con un juego alternativo de parámetros (U2-UN) y, en segundo lugar; un análisis comparativo basado en el primer conjunto de parámetros de control (U1)
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/SE2003/000744.
Solicitante: VOLVO LASTVAGNAR AB.
Nacionalidad solicitante: Suecia.
Dirección: 405 08 GÖTEBORG SUECIA.
Inventor/es: ERIKSSON, ANDERS, STEEN, MARCUS.
Fecha de Publicación: .
Fecha Solicitud PCT: 8 de Mayo de 2003.
Clasificación Internacional de Patentes:
- B60W10/02 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B60 VEHICULOS EN GENERAL. › B60W CONTROL CONJUGADO DE VARIAS SUBUNIDADES DE UN VEHICULO DE DIFERENTE TIPO O FUNCION; SISTEMAS DE CONTROL ESPECIALMENTE ADAPTADOS PARA VEHICULOS HIBRIDOS; SISTEMAS DE CONTROL DE LA CONDUCCION DE VEHICULOS TERRESTRES NO RELACIONADOS CON EL CONTROL DE UNA SUBUNIDAD PARTICULAR. › B60W 10/00 Control conjugado de subunidades de vehículo de diferentes tipos o funciones (para propulsión de vehículos de tracción exclusivamente eléctrica con una fuente de energía interior al vehículo B60L 50/00 - B60L 58/00). › incluyendo el control de los acoplamientos de la cadena cinemática.
- B60W10/06 B60W 10/00 […] › incluyendo el control de motores de combustión.
- B60W10/10D9
- B60W30/18M
- B60W30/18R2
- F16H61/02E1M
Clasificación PCT:
- B60W10/06 B60W 10/00 […] › incluyendo el control de motores de combustión.
- B60W10/10 B60W 10/00 […] › incluyendo el control de cajas de cambio de velocidades.
- B60W30/18 B60W […] › B60W 30/00 Funciones de sistemas de ayuda a la conducción de vehículos terrestres no relacionados con el control de una subunidad particular, p.ej. sistemas que utilizan el control conjugado de varias subunidades del vehículo. › Propulsión del vehículo.
- F16H61/00 MECANICA; ILUMINACION; CALEFACCION; ARMAMENTO; VOLADURA. › F16 ELEMENTOS O CONJUNTOS DE TECNOLOGIA; MEDIDAS GENERALES PARA ASEGURAR EL BUEN FUNCIONAMIENTO DE LAS MAQUINAS O INSTALACIONES; AISLAMIENTO TERMICO EN GENERAL. › F16H TRANSMISIONES. › Funciones internas de las unidades de control para cambios de velocidad o para mecanismos de inversión de las transmisiones que transmiten un movimiento rotativo.
Clasificación antigua:
- B60K41/04
- F16H61/00 F16H […] › Funciones internas de las unidades de control para cambios de velocidad o para mecanismos de inversión de las transmisiones que transmiten un movimiento rotativo.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
PDF original: ES-2359236_T3.pdf


Fragmento de la descripción:
La presente invención se refiere a un vehículo a motor dotado de embrague y transmisión automatizada entre el motor y las ruedas motrices del vehículo, comprendiendo medidas de control con una función de control del motor y una función de control de la transmisión, para controlar la transmisión de acuerdo con la posición seleccionada para un selector manual de las marchas, de manera que el medio de control con el selector de las marchas en su posición para cambio de marchas automático, cuando arranca o está circulando, selecciona la marcha que está determinada por una estrategia de selección de marchas, almacenada en dichos medios de control, como función de parámetros facilitados a los medios de control.
En vehículos de este tipo existen en la actualidad unidades de control con una estrategia de selección de marchas memorizada o almacenada, es decir, una secuencia de cambios de marchas basada en el tiempo como función, por ejemplo, de la pendiente de la carretera. Una tecnología conocida se escribe en el documento US-A-5 832 400. Para vehículos con transmisión automática convencional, en los que la transmisión cambia marchas secuencialmente mediante un convertidor de par, existe una estrategia de selección de marchas basada en un algoritmo que tiene en cuenta un punto de medición en la topología que rodea al vehículo con posición instantánea del vehículo como punto de referencia. Para determinar, por diferentes métodos, donde se encontrará el vehículo después de un cierto intervalo de tiempo, es posible modificar la puesta a punto del motor y los puntos de cambios de marchas para la transmisión automática, es decir, a qué régimen de rpm debe conectar la transmisión una marcha más larga o más corta. Posibles variantes podrían consistir en utilizar mapas electrónicos junto con un sistema de posicionamiento (por ejemplo, un Sistema de Posicionamiento Global, GPS) o extrapolar una posición futura para el vehículo. Una desventaja de este sistema es que no tiene en consideración la forma en la que varía la carretera en elevación entre dos puntos de medición, y los puntos extremos (por ejemplo, la cima de una colina) entre dos puntos de medición no se tienen en cuenta en algunos casos. El motor y la transmisión están dispuestos de acuerdo con la tecnología conocida, en base a la gran diferencia de elevación existente entre los dos puntos de medición, y la posición instantánea de la palanca de gas. La posición de la palanca de gas significa en ese caso y en el texto siguiente tanto un control de desplazamiento ajustable como un pedal de acelerador.
El documento US-A-5 832 400, solamente toma en consideración, tal como se ha mencionado, un punto único de medición durante cierto tiempo o distancia con respecto al futuro a efectos de observar si el par instantáneo del motor será suficiente, o si el motor y/o la transmisión necesitan nuevo ajuste. También se describe la forma en la que una serie de puntos de medición pueden ser utilizados, pero en este caso se utiliza un valor medio de los mismos, proporcionando, por lo tanto, un valor para la fuerza de impulsión requerida. Con una transmisión en la que se hace el cambio de marchas secuencialmente y con el método que se ha descrito, existe una incertidumbre en el sistema que tiene como resultado consecuencias tangibles en forma de una función de control del desplazamiento poco satisfactoria, aceleración irregular y emisiones del escape excesivamente grandes.
En la actualidad, existen también vehículos a motor del tipo que se ha descrito como introducción, que no se comprometen con una estrategia de selección de marchas limitada, sino que alcanzan una decisión con respecto a la relación de marcha del conjunto motriz sobre una base mucho mejor, teniendo en cuenta el concepto de futuro. La unidad de control está dispuesta en este caso, en base a los parámetros que se facilitan y, por lo tanto, como mínimo con el conocimiento de la pendiente de la carretera y posición de control del acelerador, pero también las características del motor, turbo y transmisión, de acuerdo con una estrategia de selección de velocidades basada en una serie de simulaciones de ordenador para seleccionar una relación total del conjunto de engranajes que, de acuerdo con la simulación, es óptima para un tramo de carretera determinado. Ello se basa en un criterio seleccionado bien sea de forma automática o semiautomática por el conductor. También se puede seleccionar de forma externa, de manera automática o semiautomática.
Las desventajas con la tecnología actualmente conocida son que los parámetros o criterios facilitados manualmente por el conductor o exteriormente, de forma automática o semiautomática, pueden ser erróneos, debido a negligencia humana o por otras razones. Una selección de engranajes óptima instantánea o futura, simulada, o programa de cambio de marchas para el vehículo se basará entonces en datos de entrada incorrectos, y como consecuencia la selección óptima de velocidad solamente parecerá la mejor en este caso.
El objetivo de la presente invención es conseguir un vehículo a motor del tipo que se ha descrito en la parte introductoria, que evita los problemas antes mencionados proporcionando un sistema que hace posible indicar si existe una mejor optimización de selección de marchas y/o programas de selección de marchas.
Ello se consigue de acuerdo con la invención por el hecho de que los medios de control están adaptados para llevar a cabo, por una parte, un proceso de simulación relativo a una estrategia de selección de marchas con, como mínimo, un conjunto alternativo de parámetros (U2-UN) y, por otra parte, un análisis comparativo basado en un primer conjunto de parámetros (U1).
Esto hace posible controlar los parámetros del control previstos y la posibilidad de controlar los ajustes pasa a ser una realidad práctica. Los errores que se hayan introducido pueden ser detectados, indicados y solucionados. Además, el análisis comparativo puede ser una buena base para el trabajo de desarrollar la estrategia de selección de marchas haciendo posible un ajuste óptimo de la ponderación de los parámetros de control o del programa de ajuste con respecto a un determinado tramo de carretera.
Los medios de control son dispuestos, en condiciones predeterminadas, para conseguir un programa de cambio de marchas con selección automática de las marchas para un período más largo en avance (30 segundos o más), en el que la información sobre la posición instantánea es obtenida con ayuda de GPS y las posiciones futuras son facilitadas por información mediante un mapa electrónico. Dicha información está destinada a ser facilitada a dichos medios de control y formar la base de diferentes simulaciones. El propio conductor puede seleccionar el criterio de conducción, por ejemplo, escoger las ponderaciones relativas de los parámetros de control. Los parámetros de control incluyen emisiones (tanto gases de escape como ruido), velocidad promedio y consumo del combustible. Por ejemplo, si el conductor prefiere un modelo de conducción económico optimizado, con un bajo consumo de combustible, la primera ponderación se otorga al consumo de combustible y la simulación del ordenador producirá, para la ponderación del parámetro de control determinado, el programa de cambio de marchas de mayor ahorro de energía. Además, se pueden seleccionar soluciones de compromiso al otorgar las ponderaciones deseadas a los respectivos parámetros de control. Para proporcionar una precisión adicional al resultado de la simulación, se tienen en consideración las variaciones individuales del motor individual, dado que las emisiones del motor se pueden medir en situación de conducción en diferentes situaciones de conducción y éstas pueden ser tomadas en consideración para futuros ajustes del motor. Los ajustes para el motor, por ejemplo, pueden variar a lo largo de una imagen de una carretera imaginada para la que se ha realizado la simulación, en contraste con la tecnología conocida en la que el ajuste del motor tiene solamente dos posiciones entre una posición momentánea y una posición futura. El modelo del motor es también importante para proporcionar información sobre las emisiones de gases del motor para varias circunstancias transitorias. La tecnología actualmente conocida no facilita tener en cuenta este factor. Y el cambio de marchas en la caja de velocidad no es necesario que sea realizado de manera secuencial. El ordenador simula también secuencias de cambio de marchas en las que se pueden saltar una o varias marchas.
La tecnología conocida, que utiliza GPS y mapas electrónicos, puede... [Seguir leyendo]
Reivindicaciones:
1. Vehículo a motor con embrague (3) y transmisión automatizada (9) entre el motor y las ruedas motrices del vehículo, que comprende medios de control (45,48) para controlar el motor y para controlar la transmisión, de acuerdo con una posición seleccionada para un selector electrónico de velocidades (46), de manera que los medios de control co el selector de velocidad en su posición para cambio automático en el arranque o en circulación, selecciona una marcha que está determinada por una estrategia de selección de marchas almacenada en los medios de control, como función de varios parámetros facilitados a los medios de control, caracterizado porque los medios de control están adaptados para llevar a cabo, en primer lugar, un proceso de simulación relativo a la estrategia de selección de marchas, como mínimo, con un juego alternativo de parámetros (U2-UN) y, en segundo lugar; un análisis comparativo basado en el primer conjunto de parámetros de control (U1).
2. Vehículo a motor, según la reivindicación 1, caracterizado porque dichos medios de control comprenden una primera unidad de control electrónico (48) para controlar el motor y una segunda unidad de control electrónico (45) para controlar la transmisión, adaptados ambos para comunicación entre sí.
3. Vehículo a motor, según la reivindicación 1 ó 2, caracterizado porque dichos medios de control (45, 48) están dispuestos para llevar a cabo el proceso de simulación para los conjuntos alternativos (U2-UN) en paralelo en tiempo real.
4. Vehículo a motor, según una de las reivindicaciones 1-3, caracterizado porque dichos medios de control (45, 48) están dispuestos para llevar a cabo el análisis comparativo, que comprende una evaluación de los resultados R1-RN de acuerdo con el modelo almacenado en el mismo.
5. Vehículo a motor, según la reivindicación 1 ó 2, caracterizado porque dichos medios de control (45, 48) están dispuestos para llevar a cabo el proceso de simulación para los conjuntos alternativos (U2-UN) en serie o en paralelo, o como combinación de los mismos.
6. Vehículo a motor, según la reivindicación 1, caracterizado porque un centro de control (600) está dispuesto para llevar a cabo el proceso de simulación para los conjuntos alternativos (U2-UN).
7. Vehículo a motor, según la reivindicación 1, caracterizado porque una memoria (710) está dispuesta para almacenar los resultados (R1-RN) del proceso de simulación.
8. Vehículo a motor, según la reivindicación 1, caracterizado porque los medios de presentación (510) están dispuestos para presentar, como mínimo, uno de los resultados (R1-RN) procedentes del análisis comparativo en tiempo real y una evaluación de los mismos.
9. Vehículo a motor, según la reivindicación 1, caracterizado porque un centro de control (600) está dispuesto para recibir los resultados (R1-RN) de una terminal de comunicaciones (500) y para llevar a cabo un análisis comparativo que incluye una evaluación de los resultados (R1-RN) con el objetivo de optimización.
10. Vehículo a motor, según la reivindicación 1, 6 ó 9, caracterizado porque el centro de control (600) está dispuesto para actualizar automáticamente los parámetros de control y/o el programa de ajuste en los medios de control (45, 48) basado en el resultado (R1-RN).
11. Vehículo a motor, según la reivindicación 1, caracterizado porque los medios de control (45, 48) están dispuestos para actualizar automáticamente parámetros de control y/o programas de ajuste basados en los resultados (R1-RN).
12. Vehículo a motor, según la reivindicación 1, caracterizado porque los medios de control (45, 48) están dispuestos para actualizar automáticamente parámetros de control y/o programas de ajuste basados en los resultados (R1-RN), cuando se dispone para ello manualmente un interruptor (300).
Patentes similares o relacionadas:
Línea motriz de un vehículo híbrido, en particular de un vehículo industrial o comercial, del 29 de Abril de 2020, de IVECO S.P.A.: Línea motriz de un vehículo híbrido, en particular de un vehículo industrial o comercial, comprendiendo la línea motriz: - una caja de engranajes (GR) que […]
Vehículo del tipo de montar a horcajadas equipado con un aparato de transmisión automática, del 8 de Abril de 2020, de YAMAHA HATSUDOKI KABUSHIKI KAISHA: Un vehículo del tipo de montar a horcajadas equipado con un aparato de transmisión automática , incluyendo: un operador de acelerador […]
 Procedimiento para manejar un sistema, sistema, control y producto de programa de ordenador, del 26 de Febrero de 2020, de ROBERT BOSCH GMBH: Procedimiento para manejar un sistema para un vehículo de motor, comprendiendo el sistema un control , una red de a bordo de alta tensión , una […]
Procedimiento para manejar un sistema, sistema, control y producto de programa de ordenador, del 26 de Febrero de 2020, de ROBERT BOSCH GMBH: Procedimiento para manejar un sistema para un vehículo de motor, comprendiendo el sistema un control , una red de a bordo de alta tensión , una […]
CONJUNTO PARA LIMITACION DE VELOCIDAD DE FORMA AUTOMÁTICA EN VEHÍCULOS, del 20 de Noviembre de 2019, de MARTINEZ BONET, Francisco Jose: 1. Conjunto para limitación de velocidad de forma automática en vehículos caracterizado porque comprende un asistente de velocidad encargado […]
Máquina de trabajo autopropulsada así como procedimiento para frenar una máquina de trabajo de este tipo, del 6 de Noviembre de 2019, de Liebherr-Components Biberach GmbH: Máquina de trabajo autopropulsada, en particular vehículo oruga tal como una niveladora, con un accionamiento eléctrico que comprende al menos un motor […]
Máquina de trabajo autopropulsada, así como procedimiento para frenar una máquina de trabajo de esa clase, del 6 de Noviembre de 2019, de Liebherr-Components Biberach GmbH: Máquina de trabajo autopropulsada, en particular un camión volquete o camión, con un accionamiento eléctrico que comprende al menos un motor […]
Aparato de control para un vehículo y método de control para un vehículo, del 19 de Junio de 2019, de TOYOTA JIDOSHA KABUSHIKI KAISHA: Un aparato de control para un vehículo , incluyendo el vehículo un motor de combustión , un primer motor eléctrico (MG1), un elemento rotativo […]
Aparato de transmisión automática y vehículo del tipo de montar a horcajadas equipado con el aparato, del 8 de Mayo de 2019, de YAMAHA HATSUDOKI KABUSHIKI KAISHA: Un vehículo del tipo de montar a horcajadas equipado con un aparato de transmisión automática , incluyendo: un embrague incluyendo un rotador de lado […]