DISIPOSITIVO PARA EL REGISTRO DE SITUACIONES DE CIRCULACIÓN O/DE TRÁFICO DE VEHÍCULOS Y PROCEDIMIENTO PARA LA EVALUACIÓN DE ESTOS REGISTROS.
Procedimiento para la evaluación de situaciones de marcha y de tráfico con al menos dos cámaras (2,
3) de registro dispuestas con una separación (15) mutua en un vehículo (1), cuyas zonas (11, 12) de registro se superponen en una zona (13) común de intersección, caracterizado porque con un mando en el tiempo común tiene lugar el registro de imágenes sincronizadas en el tiempo y con una disposición calibrada de las cámaras (2, 3) de registro en un sistema (20) de coordenadas de un vehículo (1) tiene lugar el registro fotogramétrico de imágenes con relación a la situación, con lo que se triangula fotogramétricamente al menos un punto de referencia, dispuesto de manera artificial o existente de manera natural, del entorno (23, 24, 25) o al menos un punto (18, 19) de identificación de al menos un segundo vehículo (17), es decir se registra en su situación actual dependiente del tiempo y se determina después, teniendo en cuenta la situación, es decir la situación y la orientación de la cámara (2, 3) de registro en el sistema (20) de coordenadas del vehículo (1) o de la situación de los puntos (18, 19) de identificación en el sistema (21) de coordenadas del al menos un segundo vehículo (17) la situación en función del tiempo del vehículo (1) equipado en el sistema (22) de coordenadas del entorno o la situación del al menos un segundo vehículo (17) en el sistema (22) de coordenadas del entorno o al menos en el sistema (20) de coordenadas del primer vehículo (1)
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/CH2004/000676.
Solicitante: TECHNIKUS AG.
Nacionalidad solicitante: Liechtensein.
Dirección: AEULESTRASSE 5 9490 VADUZ LIECHTENSTEIN.
Inventor/es: SOURLIER,DAVID.
Fecha de Publicación: .
Fecha Solicitud PCT: 8 de Noviembre de 2004.
Fecha Concesión Europea: 1 de Septiembre de 2010.
Clasificación Internacional de Patentes:
- G07C5/08R2
- G07C5/08R4C
Clasificación PCT:
- B60R11/04 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B60 VEHICULOS EN GENERAL. › B60R VEHICULOS, EQUIPOS O PARTES DE VEHICULOS, NO PREVISTOS EN OTRO LUGAR (prevención, limitación o extinción de incendios especialmente adaptadas a los vehículos A62C 3/07). › B60R 11/00 Otras instalaciones para sujetar o montar objetos. › Montaje de cámaras para funcionar en marcha; Disposición de su control en relación con el vehículo.
- G07C5/08 FISICA. › G07 DISPOSITIVOS DE CONTROL. › G07C APARATOS DE CONTROL DE HORARIOS O DE ASISTENCIA; REGISTRO O INDICACION DEL FUNCIONAMIENTO DE LAS MAQUINAS; PRODUCCION DE NUMEROS AL AZAR; APARATOS PARA VOTAR O APARATOS DE LOTERIA; DISPOSICIONES, SISTEMAS O APARATOS PARA CONTROLES NO PREVISTOS EN OTRO LUGAR. › G07C 5/00 Registro o indicación del funcionamiento de vehículos. › Registro o indicación de datos de marcha diferentes del tiempo de circulación, de funcionamiento, de parada o de espera con o sin registro de tiempos de circulación, de funcionamiento, de parada o de espera.
Clasificación antigua:
- B60R11/04 B60R 11/00 […] › Montaje de cámaras para funcionar en marcha; Disposición de su control en relación con el vehículo.
- G07C5/08 G07C 5/00 […] › Registro o indicación de datos de marcha diferentes del tiempo de circulación, de funcionamiento, de parada o de espera con o sin registro de tiempos de circulación, de funcionamiento, de parada o de espera.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
Fragmento de la descripción:
El presente invento se refiere a un dispositivo para el registro de situaciones de
circulación y/o de tráfico de vehículos. Además, se refiere a un procedimiento para la
evaluación de estos registros.
Se conocen diferentes dispositivos para el registro de las situaciones de circulación de vehículos. Por medio de sensores se registran por ejemplo la velocidad o el accionamiento del freno, que se almacenan en una memoria temporal. De esta manera se el pequeño
pueden leer los datos en espacio de tiempo de un accidente y reconstruir eventualmente el proceso del accidente. Además de los sensores mencionados, se conoce también el registro de imágenes y de sonidos. Junto a un micrófono se instalan para ello en el vehículo cámaras de vídeo, que registran lo sucedido delante o también detrás del vehículo. Esto brinda la ventaja de que – además del comportamiento del vehículo propio – se registra la situación de tráfico. En especial, en el caso ideal se pueden identificar el comportamiento y la matrícula de otros vehículos.A pesar de la cantidad de aparatos a instalar, con frecuencia sólo es posible reconstruir el desarrollo del accidente de manera insuficiente en el caso de litigio, ya que los datos obtenidos sólo reproducen de una manera poco fiable el desarrollo exacto de los hechos y su asignación en el espacio y en el tiempo en relación con la situación de tráfico en aquel instante.
A través del documento DE 199 52 832 A se conoce un sistema de documentación de accidentes y de tráfico basado en vídeos en el que al menos se prevén dos cámaras desplazadas entre sí con un campo de visión superpuesto y en el que se prevé una evaluación, que, a partir de los datos de imagen registrados en la zona de imagen superpuesta, reconstruye por medio de un procedimiento estereoscópico puntos de imagen sobre vehículos y sobre participantes en el tráfico. Este procedimiento estereoscópico es, en comparación con un procedimiento fotogramétrico mucho menos preciso y, además, no se puede automatizar con facilidad. Para representar toda una escena o incluso su desarrollo en el tiempo en 3D con una cierta fidelidad de los detalles es preciso, que con el procedimiento estereoscópico se triangulen miles de puntos, por lo que sólo puede ser utilizado para reconstrucciones cualitativas de un fenómeno, pero no para reconstrucciones cuantitativas.
En el documento DE 42 35 046 A se divulga un método para el registro fotográfico estereográfico y automático de accidentes de coches, en el que las cámaras se utilizan siempre por pares paran obtener imágenes tridimensionales del lugar del accidente, con lo que, entre otros, se registran distancias en el lugar del accidente. Si bien el registro estereoscópico estacionario de esta clase puede registrar las consecuencias de un accidente, no puede retener sus causas y su desarrollo dinámico.
Sobre la base de estos conocimientos se plantea el invento la creación de un procedimiento, que pueda ser automatizado sin problemas y que, a pesar de ello, haga posible con un mínimo de dispositivos en el vehículo una asignación en el espacio exactamente cuantificada de los acontecimientos en el espacio tridimensional antes de un accidente de tráfico o durante una situación de tráfico crítica. Además de la situación 3D actual exacta de todos los vehículos participantes, también se pueden registrar el valor y la dirección exactas de sus velocidades, aceleraciones y rotaciones.
El procedimiento según el invento parte de las reivindicaciones 1 y 2. El dispositivo según el invento para la realización de este procedimiento se ajusta a las características de las reivindicaciones 6 y 7. Otras configuraciones ventajosas de este procedimiento y de este dispositivo se desprenden de las reivindicaciones subordinadas.
Este procedimiento, que trabaja con fotogrametría y con imágenes calibradas, es muy preciso y se puede automatizar con facilidad, en especial con el concepto de que unos pocos puntos de referencia triangulables se combinan con datos conocidos del vehículo de un banco de datos. Con ello se puede obtener con un coste pequeño una gran fidelidad de los detalles.
En lo que sigue se describirá con detalle y por medio del dibujo un ejemplo de ejecución del invento. En el dibujo muestran:
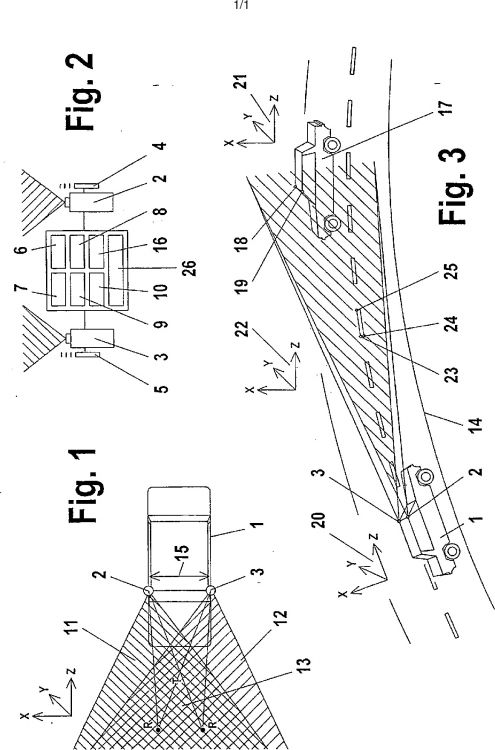
La figura 1, un vehículo visto en planta.
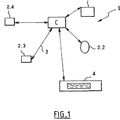
La figura 2, muestra esquemáticamente el dispositivo, que sirve para el registro de los datos, a montar en el vehículo.
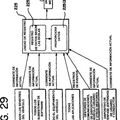
La figura 3, la vista de una situación de tráfico con dos vehículos.
Un vehículo 1 de turismo está equipado con dos cámaras 2 y 3, que sirven para la grabación de imágenes, representadas esquemáticamente. Con preferencia se trata de cámaras digitales a cada una de las que se asigna un micrófono 4 y 5. Con estas cámaras 2 y 3 de registro está acoplada al menos una memoria. En el presente caso se prevé una memoria 6 o 7 no volátil a modo de una memoria intermedia con núcleo anular. Más adelante se insistirá en la finalidad de la memoria intermedia con núcleo anular. Además, se prevé al menos otra memoria 8 y 9 no volátil acoplada con la memoria, que sirve como memoria intermedia con núcleo anular. Esta memoria adicional puede almacenar la misma cantidad de datos, respectivamente imágenes que la primera. Las cámaras 2 y 3 de registro graban imágenes en una sucesión rápida imágenes, por ejemplo 25x por segundo. Están sincronizadas mutuamente. Ventajosamente también tiene lugar una sincronización con el tiempo exacto. Esto se puede realizar con un reloj 10 controlado por radio. Esto significa, que se registra el instante de tiempo exacto de cada imagen.
Las dos cámaras 2 y 3 de registro están orientadas de tal modo, que abarquen el espacio delante del vehículo 1. Sus zonas 11 y 12 de registro se superponen en un margen 13 de intersección, que al menos abarca la calzada 14, pero ventajosamente también una franja a la izquierda y la derecha de ella. El presente dibujo esquemático sólo sirve como ilustración. En relación con el presente invento no determina la situación ni la orientación de las cámaras 2 y 3 de registro. Sin embargo, es ventajoso, que la separación 15 mutua de las dos cámaras 2 y 3 de registro se elija lo más grande posible.
La situación y la orientación de las dos cámaras 2 y 3 de registro en el vehículo 1, en especial también su separación 15 mutua, debe ser determinada en cada caso y con preferencia se debe almacenar también en una memoria 16. El conocimiento de la situación mutua de las dos cámaras 2 y 3 de registro y de su situación en el propio vehículo permite determinar con métodos de procesamiento de datos y de fotogrametría la situación exacta de uno o de varios puntos de referencia. Estos métodos son en sí conocidos. En el presente caso se pueden triangular exactamente, como se indica con T, los puntos R de referencia visibles por cada cámara 2 y 3 de registro en dos imágenes grabadas de manera sincronizada, de manera, que sus coordenadas X, Y y Z tridimensionales pueden ser determinadas de manera exacta en un sistema de coordenadas.
Es preciso agregar, que en el marco del invento también es posible prever más de dos cámaras 2 y 3 de registro. En especial con la utilización de un grupo de tres cámaras de registro es posible incrementar adicionalmente la exactitud de medida. De manera análoga a las cámaras de registro, que actúan en el sentido de marcha, se pueden disponer también adicionalmente otras orientadas hacia atrás. Teóricamente incluso a ambos lados del vehículo. De la figura 3 se desprende la transformación de los datos descritos anteriormente de una situación de tráfico de dos vehículos 1 y 17, que se aproximan mutuamente. Se representa el registro de la situación de tráfico por las dos cámaras 2 y 3 de registro del primer vehículo 1. Si los dos vehículos 1 y 17 están equipados con ellas, también tiene lugar este registro en el vehículo contrario y puede ser utilizado para la corrección.
Los puntos 18 y 19 de identificación, que sirven en el segundo vehículo 17 como puntos de referencia para la triangulación, se disponen con preferencia de manera especial con el fin de la evaluación automática. Se puede tratar de círculos o de puntos blancos. También se pueden configurar luminiscentes, tanto como elementos luminiscentes pasivos, por ejemplo marcas de reflexión, o como elementos luminiscentes activos, por ejemplo diodos luminiscentes. Sin embargo, los elementos también pueden poseer una...
Reivindicaciones:
Reivindicaciones
1. Procedimiento para la evaluación de situaciones de marcha y de tráfico con al menos dos cámaras (2, 3) de registro dispuestas con una separación (15) mutua en un vehículo (1), cuyas zonas (11, 12) de registro se superponen en una zona (13) común de intersección, caracterizado porque con un mando en el tiempo común tiene lugar el registro de imágenes sincronizadas en el tiempo y con una disposición calibrada de las cámaras (2, 3) de registro en un sistema (20) de coordenadas de un vehículo (1) tiene lugar el registro fotogramétrico de imágenes con relación a la situación, con lo que se triangula fotogramétricamente al menos un punto de referencia, dispuesto de manera artificial o existente de manera natural, del entorno (23, 24, 25) o al menos un punto (18, 19) de identificación de al menos un segundo vehículo (17), es decir se registra en su situación actual dependiente del tiempo y se determina después, teniendo en cuenta la situación, es decir la situación y la orientación de la cámara (2, 3) de registro en el sistema (20) de coordenadas del vehículo (1) o de la situación de los puntos (18, 19) de identificación en el sistema (21) de coordenadas del al menos un segundo vehículo (17) la situación en función del tiempo del vehículo (1) equipado en el sistema (22) de coordenadas del entorno o la situación del al menos un segundo vehículo (17) en el sistema (22) de coordenadas del entorno o al menos en el sistema (20) de coordenadas del primer vehículo (1).
2. Procedimiento para la evaluación de situaciones de marcha y de tráfico con al menos dos cámaras (2, 3) de registro dispuestas con una separación (15) mutua en un vehículo (1), cuyas zonas (11, 12) de registro se superponen en una zona (13) común de intersección, caracterizado porque con un mando en el tiempo común tiene lugar el registro de imágenes sincronizadas en el tiempo y con una disposición calibrada de las cámaras (2, 3) de registro en un sistema (20) de coordenadas de un vehículo (1) tiene lugar el registro fotogramétrico de imágenes con relación a la situación, con lo que se triangula fotogramétricamente al menos un punto de referencia, dispuesto de manera artificial o existente de manera natural, del entorno (23, 24, 25) o al menos un punto (18, 19) de identificación de al menos un segundo vehículo (17), es decir se registra en su situación actual dependiente del tiempo y se determina después, teniendo en cuenta la situación, es decir la situación y la orientación de la cámara (2, 3) de registro en el sistema (20) de coordenadas del vehículo (1) y de la situación de los puntos (18, 19) de identificación en el sistema (21) de coordenadas del al menos un segundo vehículo (17) la situación en función del tiempo del vehículo (1) equipado en el sistema (22) de coordenadas del entorno y la situación del al menos un segundo vehículo (17) en el sistema (22) de coordenadas del entorno o al menos en el sistema (20) de coordenadas del primer vehículo (1).
3. Procedimiento según una de las reivindicaciones precedentes, caracterizado porque teniendo en cuenta la situación de las cámaras (2, 3) de registro en el sistema (20) de coordenadas y/o teniendo en cuenta la situación de al menos un punto (18, 19) de identificación artificial o natural en el sistema (21) de coordenadas se introducen manualmente los datos del correspondiente tipo de vehículo o se extraen estos datos de un banco de datos, que contiene una gran cantidad de vehículos, de manera, que se calcula la situación actual dependiente del tiempo y con ello el movimiento de uno o de varios vehículos (1, 17) en el sistema (22) de coordenadas del entorno o al menos en el sistema
(20) de coordenadas del vehículo (1), calculando con ello una representación virtual del desarrollo de un accidente o una situación de tráfico crítica a partir de todas las perspectivas imaginables y se representa en una película 3D virtual reducida a los objetos relevantes para el accidente, respectivamente los acontecimientos.
4. Procedimiento según una de las reivindicaciones precedentes, caracterizado porque el cálculo de la situación actual dependiente del tiempo de los puntos (1, 8, 19, 23, 24, 25) de referencia así como de las cámaras (2, 3) de registro en el sistema (22) de coordenadas del entorno y/o en el sistema (20) de coordenadas del vehículo (1) y de la situación ligada a ello de los vehículos en una computadora programable con fórmulas de cálculo correspondient5es tiene lugar de manera semiautomática o automática, calculando los datos del movimiento al menos del vehículo (1) equipado y opcionalmente de al menos otro vehículo (17), es decir la situación, la dirección de marcha y todos los cambios de dirección así como la velocidad como variación en función del tiempo de la situación y de todas las variaciones de velocidad, es decir una aceleración y/o un proceso de frenado así como también la orientación y su variaciones en el tiempo.
5. Procedimiento según una de las reivindicaciones precedentes, caracterizado porque para la situación y el movimiento calculados de uno o de varios vehículos con la ayuda de imágenes del entorno registradas anteriormente o después, calibradas y con ello triangulables así como de puntos (23, 24) de identificación asignables a estas imágenes del entorno y al mismo tiempo al sistema (22) de coordenadas se calcula y almacena una imagen del entorno correspondiente al instante momentáneo y a la perspectiva de un observador calculada.
6. Dispositivo para el registro de situaciones de marcha y/o de tráfico de vehículos según una de las reivindicaciones 1 a 5 de procedimiento, formado por dos cámaras (2, 3) de registro dispuestas con una separación (15) mutua entre sí, cuyos campos (11, 12) de registro se superponen en una zona (13) de intersección, caracterizado porque las cámaras (2, 3) de registro están conectadas con un mando del tiempo, de manera, que la grabación de imágenes es sincronizada en el tiempo y la disposición de las cámaras (2, 3) de registro
es calibrada en un sistema (20) de coordenadas de un vehículo (1), de manera, que se pueden grabar imágenes calibradas fotogramétricamente con relación a la situación, es decir, que al menos un punto de referencia dispuesto de manera artificial o natural del entorno (23, 24, 25) o al menos un punto (18, 19) de identificación de al menos un segundo vehículo (17) puede ser triangulado fotogramétricamente sin medidas adicionales, es decir en su situación dependiente del tiempo, de manera, que de la grabación sincronizada gobernada en función del tiempo se puede determinar la situación actual dependiente del tiempo de los puntos de referencia del entorno (23, 24, 25) o de los puntos (18, 19) de identificación en el sistema (20) de coordenadas del vehículo (1) equipado y, además, teniendo en cuenta su situación en el sistema (21) de coordenadas del segundo vehículo
(17) y de la situación absoluta de las cámaras (2, 3) de registro en el sistema (20) se pueden determinar la situación y el movimiento dependientes del tiempo del vehículo (1) en el sistema (22) de coordenadas del entorno o la situación de al menos un segundo vehículo
(17) en el sistema (22) de coordenadas del entorno o al menos en el sistema (20) de coordenadas del vehículo (1) equipado.
7. Dispositivo para el registro de situaciones de marcha y/o de tráfico de vehículos según una de las reivindicaciones 1 a 5 de procedimiento, formado por dos cámaras (2, 3) de registro dispuestas con una separación (15) mutua entre sí, cuyos campos (11, 12) de registro se superponen en una zona (13) de intersección, caracterizado porque las cámaras (2, 3) de registro están conectadas con un mando del tiempo, de manera, que la grabación de imágenes es sincronizada en el tiempo y la disposición de las cámaras (2, 3) de registro es calibrada en un sistema (20) de coordenadas de un vehículo (1), de manera, que se pueden grabar imágenes calibradas fotogramétricamente con relación a la situación, es decir, que al menos un punto de referencia dispuesto de manera artificial o natural del entorno (23. 24. 25) o al menos un punto (18, 19) de identificación de al menos un segundo vehículo (17) puede ser triangulado fotogramétricamente sin medidas adicionales, es decir en su situación dependiente del tiempo, de manera, que de la grabación sincronizada gobernada en función del tiempo se puede determinar la situación actual dependiente del tiempo de los puntos de referencia del entorno (23, 24, 25) y de los puntos (18, 19) de identificación en el sistema (20) de coordenadas del vehículo (1) equipado y, además, teniendo en cuenta su situación en el sistema (21) de coordenadas del segundo vehículo
(17) y de la situación absoluta de las cámaras (2, 3) de registro en el sistema (20) se pueden determinar la situación y el movimiento dependientes del tiempo del vehículo (1) en el sistema (22) de coordenadas del entorno y la situación de al menos un segundo vehículo
(17) en el sistema (22) de coordenadas del entorno o al menos en el sistema (20) de coordenadas del vehículo (1) equipado.
8. Dispositivo según una de las reivindicaciones 6 ó 7, caracterizado porque posee al menos una memoria (6, 7) acoplada con las cámaras (2, 3) de registro para el almacenamiento en serie de una sucesión de imágenes y al menos otra memoria (8, 9) no volátil para el almacenamiento de la disposición de cámaras en el sistema (20) de
5 coordenadas del vehículo (1) equipado.
9. Dispositivo según una de las reivindicaciones 6 a 8, caracterizado porque las cámaras (2, 3) de registro están conectadas con un dispositivo de medición del tiempo, por ejemplo un reloj controlado por radio, con el fin de poder determinar el tiempo absoluto de la correspondiente grabación de la imagen.
10. Dispositivo según una de las reivindicaciones 6 a 9, caracterizado porque posee al menos un dispositivo de toma de sonido, por ejemplo un micrófono.
11. Dispositivo según una de las reivindicaciones 6 a 10, caracterizado porque comprende un sensor para la activación automática o para la retención de un almacenamiento de datos o un dispositivo de accionamiento, por ejemplo un pulsador en el volante, para la activación o la retención manual de un almacenamiento de datos.
12. Dispositivo según una de las reivindicaciones 6 a 11, caracterizado porque como ayuda del procedimiento se disponen puntos (18, 19, 23, 24, 25) de referencia dispuestos artificialmente en un vehículo (1, 17) y/o en la zona de vías de tráfico, pudiendo estar configurados estos puntos (18, 19, 23, 24, 25) de referencia artificiales de manera codificada en su forma y/o color y/o con luminiscencia pasiva o activa con el fin de mejorar su identificación automática.
Patentes similares o relacionadas:
PROCEDIMIENTO PARA ADQUIRIR INFORMACIÓN, del 2 de Noviembre de 2011, de ROBERT BOSCH GMBH: Procedimiento para adquirir información de la conducción de un vehículo , determinándose para al menos un estado de funcionamiento […]
PROCEDIMIENTO Y SISTEMA PARA ALMACENAR INFORMACIÓN DE CONDUCCIÓN DE MOTOCICLETAS, del 16 de Junio de 2011, de YAMAHA HATSUDOKI KABUSHIKI KAISHA: Procedimiento para el almacenamiento de información de conducción de motocicletas, que comprende las etapas de (a) adquirir datos de coordenadas de la motocicleta; […]
 REGISTRADOR DE DATOS DE LA TRAVESIA PROTEGIDO, del 12 de Julio de 2010, de L3 COMMUNICATIONS CORP: Un registrador de datos de la travesía protegido , que comprende:
a. un subsistema de memoria extraíble que incluye circuitos de memoria para almacenar datos […]
REGISTRADOR DE DATOS DE LA TRAVESIA PROTEGIDO, del 12 de Julio de 2010, de L3 COMMUNICATIONS CORP: Un registrador de datos de la travesía protegido , que comprende:
a. un subsistema de memoria extraíble que incluye circuitos de memoria para almacenar datos […]
 PROCEDIMIENTO PARA MEJORAR UN DIAGNOSTICO DE UNA AVERIA EVENTUAL EN UN VEHICULO, del 30 de Marzo de 2010, de RENAULT S.A.S.: Procedimiento para diagnosticar una eventual avería de un componente de un vehículo, incluyendo este procedimiento una primera etapa de memorización […]
PROCEDIMIENTO PARA MEJORAR UN DIAGNOSTICO DE UNA AVERIA EVENTUAL EN UN VEHICULO, del 30 de Marzo de 2010, de RENAULT S.A.S.: Procedimiento para diagnosticar una eventual avería de un componente de un vehículo, incluyendo este procedimiento una primera etapa de memorización […]
 METODO Y SISTEMA PARA UNA ARQUITECTURA DE UN ORDENADOR DE VEHICULO, del 24 de Febrero de 2010, de NAVIGATION TECHNOLOGIES CORPORATION: Un método para el funcionamiento de aplicaciones de software en un vehículo terrestre usando una red de datos compuesto por una diversidad […]
METODO Y SISTEMA PARA UNA ARQUITECTURA DE UN ORDENADOR DE VEHICULO, del 24 de Febrero de 2010, de NAVIGATION TECHNOLOGIES CORPORATION: Un método para el funcionamiento de aplicaciones de software en un vehículo terrestre usando una red de datos compuesto por una diversidad […]
 VEHICULO QUE INCLUYE UN TAG, del 15 de Febrero de 2010, de HONDA MOTOR CO., LTD.: Un vehículo incluyendo un tag montado en él, incluyendo el tag (71a-71f) un medio de registro en el que se registra información de […]
VEHICULO QUE INCLUYE UN TAG, del 15 de Febrero de 2010, de HONDA MOTOR CO., LTD.: Un vehículo incluyendo un tag montado en él, incluyendo el tag (71a-71f) un medio de registro en el que se registra información de […]
 SISTEMA DE CONTROL DE LA ACTIVACION Y DESACTIVACION DE DISPOSITIVOS ELECTRICOS PREVISTOS EN VEHICULOS, del 16 de Julio de 2007, de OLID RUBIO,JESUS
GARCIA MARTIN,MAXIMA: Sistema de control de la activación y desactivación de dispositivos eléctricas previstos en vehículos.#Se caracteriza por el hecho de que comprende una tarjeta extraíble […]
SISTEMA DE CONTROL DE LA ACTIVACION Y DESACTIVACION DE DISPOSITIVOS ELECTRICOS PREVISTOS EN VEHICULOS, del 16 de Julio de 2007, de OLID RUBIO,JESUS
GARCIA MARTIN,MAXIMA: Sistema de control de la activación y desactivación de dispositivos eléctricas previstos en vehículos.#Se caracteriza por el hecho de que comprende una tarjeta extraíble […]
 SISTEMA DE GRABACION DE INCIDENTES DE TRAFICO INSTALADO EN VEHICULOS DE CARRETERA, del 7 de Febrero de 2011, de GRILLO DOLSET, IGNACIO
BUISAC RAMON, JOSE MARIA: Sistema de grabación de incidentes de tráfico instalado en vehículos de carretera, que comprende:- al menos una cámara de vídeo instalada en el propio vehículo, […]
SISTEMA DE GRABACION DE INCIDENTES DE TRAFICO INSTALADO EN VEHICULOS DE CARRETERA, del 7 de Febrero de 2011, de GRILLO DOLSET, IGNACIO
BUISAC RAMON, JOSE MARIA: Sistema de grabación de incidentes de tráfico instalado en vehículos de carretera, que comprende:- al menos una cámara de vídeo instalada en el propio vehículo, […]