METODO Y SISTEMA PARA UNA ARQUITECTURA DE UN ORDENADOR DE VEHICULO.
Un método para el funcionamiento de aplicaciones de software en un vehículo terrestre (10) usando una red de datos (18) compuesto por una diversidad de procesadores interconectados (212),
que comprende las etapas de:
el desarrollo de un modelo de datos dinámico (213) del vehículo (10) y del entorno alrededor del vehículo (10);
la obtención de entradas del conductor desde la interfase del conductor (250);
la ejecución de una diversidad de aplicaciones de funcionamiento (224), cada una de las cuales determina un funcionamiento deseado del vehículo respectivo usando el modelo de datos (213);
la determinación de un funcionamiento decidido del vehículo usando la entrada del conductor y los funcionamientos deseados del vehículo respectivos desde la diversidad de aplicaciones de funcionamiento (224); y
la obtención de los comandos para los actuadores asociados con los componentes del equipamiento del vehículo, en el que dichos comandos efectúan dichos funcionamientos decididos del vehículo, en donde el modelo de datos (213) se forma utilizando información desde
un primer grupo de sensores (202) que obtienen dinámicamente información de seguridad mejorada sobre el entorno y las condiciones alrededor del vehículo (10);
un segundo grupo de sensores (204) que obtienen dinámicamente información sobre los sistemas mecánicos del vehículo (10);
caracterizado por que el modelo de datos se forma utilizando información desde
una base de datos geográfica (220) instalada en el vehículo (10), en el que la base de datos geográfica (220) contiene datos sobre las características geográficas en un área en la que se localiza el vehículo (10)
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E99310566.
Solicitante: NAVIGATION TECHNOLOGIES CORPORATION.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 10400 WEST HIGGINS ROAD,ROSEMONT, ILLINOIS 60018-37.
Inventor/es: SHUMAN,VALERIE, PAULAUSKAS,CYNTHIA, SHIELDS,RUSSELL, WEILAND,RICHARD, JASPER,JOHN C.
Fecha de Publicación: .
Fecha Solicitud PCT: 24 de Diciembre de 1999.
Fecha Concesión Europea: 21 de Octubre de 2009.
Clasificación Internacional de Patentes:
- B60K28/06 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B60 VEHICULOS EN GENERAL. › B60K DISPOSICIONES O MONTAJE DE CONJUNTOS DE PROPULSION O DE TRANSMISIONES SOBRE VEHICULOS; DISPOSICIONES O MONTAJE DE VARIOS MOTORES PRINCIPALES DIFERENTES EN VEHÍCULOS; ACCIONAMIENTOS AUXILIARES PARA VEHICULOS; INSTRUMENTACION O TABLEROS DE A BORDO DE VEHICULOS; DISPOSICIONES DE CONJUNTOS DE PROPULSION SOBRE VEHICULOS, RELATIVAS A LA REFRIGERACION, A LA ADMISION DE AIRE, AL ESCAPE DE GASES O A LA ALIMENTACION DE CARBURANTE. › B60K 28/00 Dispositivos de seguridad para el control de la unidad de propulsión, especialmente adaptados para o dispuestos en vehículos, p. ej. que impiden el suministro de combustible o el encendido en caso de condiciones potencialmente peligrosas (para vehículos propulsados eléctricamente B60L 3/00; sistemas para control de la conducción del vehículo para fines no relacionados con el control de una subunidad particular B60W 30/00; sistemas de control d la conducción especialmente adaptados para vehículos terrestres autónomos B60W 60/00). › que responden a una incapacidad del conductor.
- B60K31/00D
- B60K31/00F
- B60R25/04 B60 […] › B60R VEHICULOS, EQUIPOS O PARTES DE VEHICULOS, NO PREVISTOS EN OTRO LUGAR (prevención, limitación o extinción de incendios especialmente adaptadas a los vehículos A62C 3/07). › B60R 25/00 Equipamientos o sistemas para impedir o señalar el uso no autorizado o el robo del vehículo (cerraduras para vehículos E05B 77/00 - E05B 85/00). › actuando sobre el sistema de propulsión, p. ej. sobre el motor.
- G07C5/08R2
- G08G1/0968A2
- G08G1/0968B1
- G08G1/0968C3
Clasificación PCT:
- B60K31/00 B60K […] › Accesorios actuantes únicamente sobre una sola subunidad, para el control automático de la velocidad, p.ej. prevenir que la velocidad sobrepase un valor determinado o mantener una velocidad particular, seleccionada por el conductor del vehículo (accesorios actuantes sobre dos o más subunidades B60W 30/14; control del conjunto de propulsión en sí ver las clases o subclases apropiadas, p. ej. F02D; indicadores de velocidad G01P; sistemas o dispositivos para controlar la velocidad en general G05D 13/00).
- B60R16/02 B60R […] › B60R 16/00 Circuitos eléctricos o circuitos de fluidos especialmente adaptados a vehículos y no previstos en otro lugar; Disposiciones de elementos de circuitos eléctricos o circuitos de fluido especialmente adaptados a vehículos y no previstos en otro lugar. › eléctricos.
- B60R21/01 B60R […] › B60R 21/00 Disposiciones o equipamientos sobre los vehículos para proteger a los ocupantes o a los peatones o para evitar ser dañados en caso de accidente o de otros riesgos de la circulación (cinturones o arneses de seguridad en los vehículos B60R 22/00; asientos construidos para proteger al ocupante de los efectos de las fuerzas de aceleración anormales, p. ej. asientos anticolisión o asientos de seguridad, B60N 2/42; disposiciones para absorber la energía en los volantes de dirección de vehículos B62D 1/11; disposiciones para absorber la energía en las columnas de dirección de vehículos B62D 1/19). › Circuitos eléctricos para activar dispositivos de seguridad en el vehículo en caso de accidente o de ser éste inminente.
- G07C5/08 FISICA. › G07 DISPOSITIVOS DE CONTROL. › G07C APARATOS DE CONTROL DE HORARIOS O DE ASISTENCIA; REGISTRO O INDICACION DEL FUNCIONAMIENTO DE LAS MAQUINAS; PRODUCCION DE NUMEROS AL AZAR; APARATOS PARA VOTAR O APARATOS DE LOTERIA; DISPOSICIONES, SISTEMAS O APARATOS PARA CONTROLES NO PREVISTOS EN OTRO LUGAR. › G07C 5/00 Registro o indicación del funcionamiento de vehículos. › Registro o indicación de datos de marcha diferentes del tiempo de circulación, de funcionamiento, de parada o de espera con o sin registro de tiempos de circulación, de funcionamiento, de parada o de espera.
- G08G1/0968 G […] › G08 SEÑALIZACION. › G08G SISTEMAS DE CONTROL DE TRÁFICO (control de tráfico ferroviario, seguridad del tráfico ferroviario B61L; sistemas de radar o sistemas análogos, sistemas sonar o sistemas lidar especialmente adaptados para el control del tráfico G01S 13/91, G01S 15/88, G01S 17/88; sistemas de radar o sistemas análogos, sistemas sonar o sistemas lidar especialmente adaptados para anticolisión G01S 13/93, G01S 15/93, G01S 17/93; control de posición, rumbo, altitud o actitud de vehículos terrestres, de agua, el aire o el espacio, no es específico para un entorno de tráfico G05D 1/00). › G08G 1/00 Sistemas de control del tráfico para vehículos en carretera (disposición de las señales de tráfico o las señales de carretera E01F 9/00). › Sistemas que incluyen transmisión de instrucciones de navegación al vehículo.
Clasificación antigua:
- B60R16/02 B60R 16/00 […] › eléctricos.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
Fragmento de la descripción:
Método y sistema para una arquitectura de un ordenador de vehículo.
Método y sistema para una arquitectura de ordenadores del vehículo inteligente.
Antecedentes de la invención
La presente invención se refiere a una arquitectura de ordenadores de vehículos y, más particularmente, la presente invención se refiere a una arquitectura de ordenadores novedosa que incluye una programación de modelos a partir de la que se construye el modelo de datos del vehículo y del entorno alrededor del vehículo, lo que se usa a su vez por las aplicaciones funcionales del vehículo para proporcionar varias funciones de modo consistente y eficiente.
A lo largo de los años, los fabricantes de los vehículos para carreteras, tales como automóviles, furgonetas, camiones, autobuses y otros similares, han utilizado la tecnología de los ordenadores para mejorar el funcionamiento de las características y funciones existentes en los vehículos así como para proporcionar nuevas características y funciones. Por ejemplo, se han desarrollado controladores programables, procesadores de diseño personalizado, sistemas integrados y/o módulos de ordenador que dan asistencia e incluso controlan varios tipos de equipos mecánicos en los vehículos. Por ejemplo, se han desarrollado controladores programables o módulos de ordenador que controlan o dan asistencia a varias funciones del motor, tales como la inyección de combustible, el control de tiempos y otros similares. Se han desarrollado controladores programables o módulos de ordenador para mejorar o dar asistencia al funcionamiento de los sistemas de transmisión, sistemas de suspensión, sistemas de frenado y otros similares. La sofisticación de estas mejoras ha avanzado cuando ha aumentado la potencia de proceso disponible para estas finalidades. Se espera que en el futuro se controlarán o recibirán asistencia más aspectos de los equipos mecánicos en los vehículos mediante procesadores o controladores para mejorar el rendimiento, la fiabilidad y la seguridad, para reducir emisiones y otros similares.
Aparte de usarse la tecnología de ordenadores para respaldar varias funciones mecánicas en los vehículos, los procesadores, los controladores u otras tecnologías basadas en ordenadores programables se usan en los vehículos en otras formas. Son ejemplos los teléfonos de vehículos, equipos de entretenimiento (tales como reproductores de CDs), sistemas de navegación del vehículo inteligente y sistemas de ayuda de emergencia en carretera. Además, pueden llegar a estar disponibles en los vehículos nuevos tipos de equipos que proporcionan características completamente nuevas. Por ejemplo, los vehículos pueden incluir sistemas de radar que detecten obstáculos sobre la carretera por delante y frenen entonces automáticamente el vehículo para evitar accidentes. Otro ejemplo es un sistema de correo electrónico del vehículo inteligente que descarga y lee automáticamente el e-mail del conductor. Estos nuevos tipos de equipos será probable que incluyan uno o más procesadores y la programación apropiada.
Estos nuevos tipos de equipo mantienen la promesa de realizar el funcionamiento del vehículo más seguro, más fiable, menos contaminante y más disfrutable. Sin embargo, hay varios factores en relación al suministro de estos tipos de características que restringen la implementación. Un factor se relaciona con permitir que varios equipos controlados por procesadores trabajen conjuntamente. Aunque muchos de estos tipos de equipos controlados por procesadores pueden ser (y han sido) implementados por etapas, existe la posibilidad de que el funcionamiento de algún equipo entre en conflicto con el funcionamiento de otro equipo. Esta posibilidad puede aumentar en el futuro cuando se proporcionen en los vehículos más tipos de equipos controlados por procesadores. Otro factor se refiere a la necesidad de proporcionar características de fallo seguro y de respaldo cuando los usuarios aumenten su confianza en esas características. Aún otro factor es que cuando el número proporcionado en un vehículo de tipos de equipos controlados por procesador aumenta, existe ahí una oportunidad para la eficiencia como resultado de compartir recursos que permite que se disminuya el coste total. Aún otra consideración es que cuando se proporcionan en un vehículo más equipos controlados por procesadores, pueden surgir beneficios sinérgicos de compartir recursos.
El documento de EE.UU. US 4 829 434 A describe un método para el funcionamiento de aplicaciones de software en un vehículo utilizando una red de datos de acuerdo con el preámbulo de la reivindicación 1 y de una arquitectura de ordenadores del vehículo inteligente de acuerdo con el preámbulo de la reivindicación 15.
Sumario de la invención
Se proporciona un método para el funcionamiento de aplicaciones de programación en un vehículo terrestre como se expone en la reivindicación 1. También se proporciona una arquitectura de ordenadores del vehículo inteligente como se expone en la reivindicación 15, un sistema de control de crucero adaptativo como se expone en la reivindicación 20 y un sistema de detección de obstáculos como se expone en la reivindicación 22.
Para encarar las preocupaciones anteriores, las realizaciones de la presente invención comprenden una arquitectura de ordenadores para un vehículo motorizado terrestre. La arquitectura de ordenadores incluye una red de datos compuesta por una diversidad de procesadores interconectados, un primer grupo de sensores que responden a las condiciones ambientales alrededor del vehículo, un segundo grupo de sensores que responden a los sistemas de equipamiento del vehículo y una base de datos de mapa que contiene los datos que representan las características geográficas en el área geográfica alrededor del vehículo. Un programa de modelizado del entorno del vehículo, ejecutado sobre la red de datos, usa las salidas del primer y segundo grupo de sensores y la base de datos del mapa para proporcionar y actualizar continuamente un modelo de datos que representa las condiciones del entorno del vehículo, pasadas, presentes y futuras alrededor del vehículo y las características geográficas, incluyendo las estructuras, objetos y obstáculos alrededor del vehículo. Las aplicaciones de programación de funcionamientos del vehículo, ejecutadas sobre la red de datos, utilizan el modelo de datos para determinar el funcionamiento deseado del vehículo en el contexto del entorno del vehículo pasado, presente y futuro. Una interfase de conductor recibe las entradas del conductor del vehículo. El programa de control del vehículo, ejecutado sobre la red de datos, recibe las salidas de las aplicaciones de programación de funcionamientos del vehículo y de la interfase del conductor, determina un funcionamiento decidido para los sistemas de equipamiento del vehículo y proporciona los comandos de salida indicativos del mismo. Las aplicaciones de programación de funcionamientos del vehículo pueden incluir un control de crucero activo, llamada de emergencia automatizada y sistemas de aviso de colisión y de obstáculo, entre otros. También se incluye un registro de conducción que mantiene los registros de los estados de todos los sistemas del vehículo y del conductor.
De acuerdo con una realización de la invención, se describe una nueva arquitectura de ordenadores para un vehículo. La arquitectura de ordenadores organiza las aplicaciones y los sistemas en el vehículo en dos grupos. Los sistemas y las aplicaciones en el primer grupo son los sistemas de ayuda al conductor. Los sistemas de ayuda al conductor incluyen los sistemas relacionados con la movilidad crítica y los relacionados con la seguridad, tales como el motor, frenos, airbags y otros similares, así como el software que soporta éstos. Los sistemas en el segundo grupo son los sistemas de servicios e información móviles. Los sistemas de servicios e información móviles proporcionan para la comodidad de conductor y pasajeros, diversiones, comunicaciones no de emergencia y navegación. El primer y segundo grupos se comunican entre sí a través de un sistema de cortafuegos interno. El sistema de cortafuegos interno asegura que el funcionamiento de los sistemas de ayuda al conductor no se ponga en peligro por el funcionamiento de los sistemas de servicios e información móviles. Los sistemas de ayuda al conductor y los sistemas de servicios e información móviles pueden intercambiar información con una o más redes externas usando los sistemas de comunicaciones inalámbricas del vehículo. Un segundo sistema de cortafuegos impide que las transmisiones de datos externas no autorizadas y/o no deseadas interfieran con los...
Reivindicaciones:
1. Un método para el funcionamiento de aplicaciones de software en un vehículo terrestre (10) usando una red de datos (18) compuesto por una diversidad de procesadores interconectados (212), que comprende las etapas de:
el desarrollo de un modelo de datos dinámico (213) del vehículo (10) y del entorno alrededor del vehículo (10);
la obtención de entradas del conductor desde la interfase del conductor (250);
la ejecución de una diversidad de aplicaciones de funcionamiento (224), cada una de las cuales determina un funcionamiento deseado del vehículo respectivo usando el modelo de datos (213);
la determinación de un funcionamiento decidido del vehículo usando la entrada del conductor y los funcionamientos deseados del vehículo respectivos desde la diversidad de aplicaciones de funcionamiento (224); y
la obtención de los comandos para los actuadores asociados con los componentes del equipamiento del vehículo, en el que dichos comandos efectúan dichos funcionamientos decididos del vehículo, en donde el modelo de datos (213) se forma utilizando información desde
un primer grupo de sensores (202) que obtienen dinámicamente información de seguridad mejorada sobre el entorno y las condiciones alrededor del vehículo (10);
un segundo grupo de sensores (204) que obtienen dinámicamente información sobre los sistemas mecánicos del vehículo (10);
caracterizado por que el modelo de datos se forma utilizando información desde
una base de datos geográfica (220) instalada en el vehículo (10), en el que la base de datos geográfica (220) contiene datos sobre las características geográficas en un área en la que se localiza el vehículo (10).
2. El método de la reivindicación 1 en el que el modelo de datos (213) incluye información sobre objetos alrededor del vehículo (10), incluyendo otros vehículos (11) que se localizan por delante del vehículo (10),
y en el que la diversidad de aplicaciones de funcionamiento (224) incluyen una aplicación de control de crucero adaptativo (224(1)) que realiza las etapas de:
el cálculo y actualización de una velocidad requerida del vehículo (10) para mantener una distancia apropiada entre el vehículo (10) y los otros vehículos (11) localizados por delante del vehículo (10); y
en el que la etapa de determinar un funcionamiento del vehículo decidido comprende la etapa de:
el uso de la distancia apropiada calculada por la aplicación de control de crucero adaptativo (224(1)).
3. El método de la reivindicación 2 en el que dicho vehículo (10) incluye las aplicaciones de cálculo de rutas (324(2)) y de guiado (324(1)) que realizan las etapas de:
la recepción de una entrada desde el conductor indicando un destino deseado;
la determinación de una ruta calculada al destino deseado a lo largo de carreteras en el área en la que se localiza el vehículo (10); y
el suministro de guiado al conductor para el seguimiento de la ruta calculada; y
en el que dicha aplicación de control de crucero adaptativo (224(1)) realiza la etapa de:
la utilización de la ruta calculada para determinar la parte del entorno alrededor del vehículo (10) que se localiza por delante del vehículo (10) a lo largo de la ruta calculada.
4. El método de la reivindicación 1 en el que el modelo de datos (213) incluye los datos de estado, y
en el que la diversidad de aplicaciones de funcionamiento (224) incluye una aplicación de llamada de emergencia automatizada (224(15)) que realiza las etapas de:
la exploración de los datos de estado en dicho modelo de datos (213) para busca de eventos de activación; y
tras la detección de un evento de activación en dichos datos de estado en dicho modelo de datos (213), la construcción de un mensaje de llamada de emergencia automatizado que indica dicho evento de activación;
y en el que la etapa de la determinación de un funcionamiento del vehículo decidido comprende la etapa del envío de un mensaje de llamada de emergencia automatizado desde un sistema de comunicaciones inalámbricas instalado en el vehículo (10).
5. El método de la reivindicación 4 en el que dicha aplicación de llamada de emergencia automatizada (224(15)) realiza además la etapa de:
la inclusión de datos sobre el historial médico de un conductor del vehículo (10) en dicho mensaje de llamada de emergencia automatizado.
6. El método de la reivindicación 4 en el que dicha aplicación de llamada de emergencia automatizada (224(15)) realiza además la etapa de:
la inclusión de datos sobre los historiales médicos de pasajeros en dicho mensaje de llamada de emergencia automatizado.
7. El método de la reivindicación 4 en el que dicha aplicación de llamada de emergencia automatizada (224(15)) realiza además la etapa de:
la inclusión de datos que identifican una posición geográfica del vehículo (10) en dicho mensaje de llamada de emergencia automatizado.
8. El método de la reivindicación 4 en el que los datos de estado incluyen datos sobre un conductor del vehículo (10).
9. El método de la reivindicación 4 en el que los datos de estado incluyen datos sobre los sistemas del equipamiento (208) del vehículo (10).
10. El método de la reivindicación 4 que comprende además:
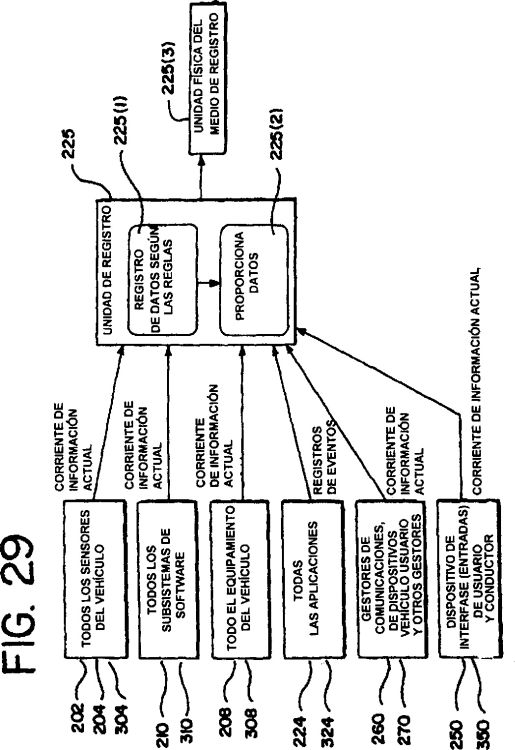
el almacenamiento de datos en un registrador de conducción (225) incluido en el vehículo (10), en el que los datos almacenados indican que el mensaje de llamada de emergencia automatizado se envió en respuesta al evento de activación.
11. El método de la reivindicación 1 en el que el modelo de datos (213) incluye datos de estado,
en el que el vehículo (10) incluye una aplicación de llamada de emergencia manual (324(15)) en la que un conductor solicita que se envíe un mensaje de llamada de emergencia inalámbrico para ayuda,
en el que la diversidad de aplicaciones de funcionamientos incluye una aplicación de llamada de emergencia automatizada (224(15)) que realiza las etapas de:
la búsqueda en los datos de estado en dicho modelo de datos (213) de eventos de activación; y
tras la detección de un evento de activación en dichos datos de estado, la construcción de un mensaje de llamada de emergencia automatizado que indica dicho evento de activación;
la recepción de dicha solicitud desde dicha aplicación de llamada de emergencia manual (324(15)); y
la integración de la solicitud desde dicha aplicación de llamada de emergencia manual (324(15)) con el mensaje de llamada de emergencia automatizado para formar un mensaje de llamada de emergencia integrado; y
en el que la etapa de determinar un funcionamiento decidido del vehículo incluye el envío de dicho mensaje de llamada de emergencia integrado desde un sistema de comunicaciones inalámbricas instalado en el vehículo.
12. El método de la reivindicación 1 en el que el modelo de datos (213) incluye información sobre los obstáculos detectados alrededor del vehículo (10), en el que dichos obstáculos se detectan mediante un proceso que identifica objetos alrededor del vehículo (10) mediante la localización y velocidad relativa al vehículo (10), y
en el que la diversidad de aplicaciones de funcionamiento incluye una aplicación de aviso de obstáculo (227(7)(1)) que incluye las etapas de:
la relación de la velocidad del vehículo (10) con los obstáculos detectados alrededor del vehículo (10);
la determinación de si proporcionar un aviso al conductor del vehículo basándose en dicha etapa de relación; y
si se determina que se asegure un aviso al conductor, la solicitud de que se proporcione un comando al conductor, y
en el que la etapa de la determinación del funcionamiento decidido del vehículo incluye la operación de comandar al equipamiento de interfase de usuario incluido en el equipamiento del vehículo (10) que muestre un aviso al conductor.
13. El método de la reivindicación 1 en el que la diversidad de aplicaciones del funcionamiento incluye una aplicación de información al exterior (224(18)) que realiza las etapas de:
la compilación de datos desde el segundo grupo de sensores (204) sobre las condiciones externas, incluyendo la precipitación y las condiciones peligrosas de la carretera, en un informe externo; y
la solicitud de que se transmita el informe externo mediante el equipamiento de comunicaciones incluido en dichos componentes del equipamiento del vehículo a un proveedor de servicios para que se transfiera a otros vehículos (11).
14. El método de la reivindicación 1, en el que al menos un sensor del primer grupo de sensores (202) detecta objetos físicamente en la proximidad del vehículo (10).
15. Una arquitectura de ordenadores (100) del vehículo inteligente para un vehículo terrestre (10) que tiene una diversidad de sistemas de equipamiento, comprendiendo la arquitectura de ordenadores (100) del vehículo inteligente:
una diversidad de procesadores (212) interconectados para formar una red de datos a través de la que los programas pueden compartir datos;
una programación de modelizado del entorno del vehículo (210) para la ejecución sobre dicha red de datos y dispuesta para proporcionar un modelo de datos (213) que representa dicho vehículo (10) y el entorno alrededor de dicho vehículo (10);
las aplicaciones de programación del funcionamiento del vehículo (224) para la ejecución sobre dicha red de datos, en la que esas aplicaciones de programación del funcionamiento del vehículo (224) se disponen para determinar los funcionamientos deseados del vehículo (10) basados en el análisis de dicho modelo de datos (213) y se dispone para proporcionar salidas indicativas de los mismos;
una interfase de conductor (250) que se dispone para recibir entradas de un conductor de dicho vehículo (10) y se dispone para proporcionar salidas indicativas de las mismas; y
una programación de control crítico del vehículo (230) para la ejecución sobre dicha red de datos, en la que dicha programación de control crítico del vehículo (230) se dispone para recibir dichas salidas desde dichas aplicaciones de programación del funcionamiento (224) del vehículo (10) y de dicha interfase del conductor (250), determinar los funcionamientos decididos para dichos sistemas de equipamiento (208), y proporcionar comandos de salida indicadores de dichos funcionamientos decididos a dicha diversidad de sistemas de equipamiento (208) en donde la arquitectura comprende:
un primer grupo de dispositivos sensores (202) dispuestos para obtener dinámicamente información mejorada de seguridad sobre el entorno y las condiciones alrededor del vehículo (10);
un segundo grupo de dispositivos sensores (204) dispuestos para obtener dinámicamente información sobre los sistemas mecánicos del vehículo (10);
caracterizado por que la arquitectura comprende además
una base de datos geográfica (220) que contiene datos que representan las características geográficas en un área geográfica alrededor del vehículo (10);
en el que la programación de modelizado del entorno del vehículo se acopla para recibir las salidas de dichos primer (202) y segundo grupo (204) de dispositivos sensores, en el que dicha programación de modelizado del entorno del vehículo (210) se dispone para usar los datos desde dicha base de datos geográfica (220) y dichas salidas desde dichos primer (202) y segundo grupo (204) de dispositivos sensores para actualizar dinámicamente dicho modelo de datos.
16. La arquitectura de ordenadores (100) del vehículo inteligente de la reivindicación 15 que comprende además:
una primera interfase de programación a la que dichos primer (202) y segundo (204) grupo de dispositivos sensores se disponen para proporcionar sus salidas y desde las que dicha programación de modelizado del entorno del vehículo (210) se dispone para recibir dichas salidas desde dichos primer (202) y segundo (204) grupo de dispositivos sensores.
17. La arquitectura de ordenadores (100) del vehículo inteligente de la reivindicación 15 que comprende además:
una segunda interfase de programación en la que dicha programación de control crítico (230) del vehículo se dispone para proporcionar dichos comandos de salida y desde la que dicha diversidad de sistemas de equipamiento se disponen para recibir los comandos de salida.
18. La arquitectura de ordenadores (100) del vehículo inteligente de la reivindicación 15 que comprende además:
una aplicación de registro de la conducción que se dispone para almacenar datos desde dicho primer grupo de dispositivos sensores (202), dicho segundo grupo de dispositivos sensores (204), dicha programación de modelizado del entorno del vehículo, dichas aplicaciones de programación del funcionamiento del vehículo (224) y dicha interfase del conductor en un almacenamiento de memoria de registro de conducción no volátil instalada en el vehículo (10).
19. La arquitectura de ordenadores (100) del vehículo inteligente de la reivindicación 15 en el que dichas aplicaciones de programación del funcionamiento del vehículo comprenden:
una aplicación de control de crucero adaptativo que se dispone para analizar los datos en dicho modelo de datos (213), proporcionar una salida que indica una velocidad del vehículo (10) para mantener una distancia apropiada entre el vehículo (10) y los obstáculos por delante del vehículo (10), y entonces actualizar dicha salida;
una aplicación de llamada de emergencia automatizada que se dispone para analizar los datos de estado en dicho modelo de datos (213) y proporcionar una salida para enviar una comunicación inalámbrica solicitando una ayuda en carretera tras la detección de un evento de activación en dichos datos de estado; y
una aplicación de aviso de obstáculos que se dispone para analizar los datos en dicho modelo de datos (213) para detectar obstáculos localizados alrededor del vehículo (10) y proporcionar una salida para suministrar un aviso a un conductor del vehículo (10) tras la detección de un obstáculo con el que el vehículo (10) podría colisionar.
20. Un sistema de control de crucero adaptativo implementado en un vehículo, comprendiendo el sistema de control de crucero adaptativo la arquitectura (100) del vehículo inteligente de la reivindicación 15, y que comprende además:
una aplicación de control de crucero adaptativo que se dispone para usar el modelo de datos (213) para determinar un funcionamiento apropiado del vehículo (10), incluyendo el mantenimiento de una distancia apropiada entre el vehículo (10) y los obstáculos por delante del vehículo (10).
21. El sistema de control de crucero adaptativo de la reivindicación 20 que comprende además:
una aplicación de cálculo de rutas sensible a las entradas desde el conductor dispuestas para indicar un destino deseado y adaptadas para determinar una ruta a lo largo de una red de carreteras localizadas en dicha área geográfica a dicho destino deseado; y
una aplicación de guiado en ruta que se dispone para usar dicha ruta determinada para explicar al conductor las instrucciones de las maniobras para seguir dicha ruta determinada;
y en el que además dicha aplicación de control de crucero adaptativo se dispone para usar dicha ruta determinada para identificar qué parte del área geográfica está por delante del vehículo (10) a lo largo de la ruta determinada.
22. Un sistema de detección de obstáculos implementado en un vehículo, que comprende la arquitectura del vehículo inteligente de la reivindicación 15, y en el que dicha programación de modelizado del entorno del vehículo comprende:
un programa de procesamiento de imágenes que se dispone para usar los datos desde el primer grupo de sensores (202) para obtener imágenes del área alrededor del vehículo (10) y explorarla en busca de objetos en dichas imágenes;
un programa identificador de objetos que se dispone para usar los datos desde el programa de procesamiento de imágenes que relaciona los objetos encontrados en dichas imágenes exploradas con los datos desde la base de datos del mapa para identificar dichos objetos encontrados; y
un programa de detección de obstáculos que se dispone para recibir datos desde el programa identificador de objetos que identifica dichos objetos y determina si dichos objetos identificados son obstáculos a evitarse; y
en el que dicho modelo de datos (213) incluye una identificación de dichos obstáculos a evitarse.
23. El sistema de detección de obstáculos de la reivindicación 22 que comprende además:
un gestor de comunicaciones que se dispone para recibir datos desde el exterior del vehículo (10) que relaciona los obstáculos detectados por otros vehículos en el área alrededor del vehículo (10); y
en el que dicho programa de detección de obstáculos se dispone para recibir dichos datos desde el gestor de comunicaciones y usar dichos datos desde el gestor de comunicaciones cuando se identifican los objetos detectados como obstáculos.
24. El sistema de detección de obstáculos de la reivindicación 22 que comprende además:
un gestor de comunicaciones que se dispone para recibir dichos datos desde dicho programa de detección de obstáculos que identifica objetos alrededor del vehículo (10) como obstáculos y se dispone para transmitir dichos datos a un proveedor de servicios para que dichos datos sean transferidos a otros vehículos en dicha área.
Patentes similares o relacionadas:
Sistema y procedimiento antirrobo para vehículo, y aplicación de este sistema para la gestión de una flota de vehículos, del 8 de Julio de 2020, de Eileo: Sistema antiarranque para vehículo, que incluye: - un transpondedor antiarranque integrado dentro del vehículo, - una etiqueta electrónica […]
DISPOSITIVO DE PREVENCIÓN PARA EVITAR LA CONDUCCIÓN BAJO LOS EFECTOS DE ESTUPEFACIENTES Y ALCOHOL, del 10 de Febrero de 2020, de CANO LABRADOR, José Manuel: 1. Un dispositivo de prevención para evitar la conducción bajo los efectos de estupefacientes y alcohol conformado por una cámara superior central con función de […]
Aparato, método y artículo para la seguridad de vehículos, del 4 de Diciembre de 2018, de Gogoro Inc: Un sistema de seguridad del vehículo para un vehículo , que comprende: al menos un controlador ; un sensor de movimiento acoplado de forma […]
DISPOSITIVO DE SEGURIDAD PARA VEHÍCULOS, del 7 de Septiembre de 2018, de LM NORSU, S.L: 1. Dispositivo de seguridad para vehículos, caracterizado porque está constituido a partir de una carcasa en la que se establece un circuito […]
EQUIPO ELECTRONICO DE SEGURIDAD PARA VEHÍCULOS, del 25 de Julio de 2018, de PETRONICS TECNOLOGIA S.L: 1. Equipo electrónico de seguridad para vehículos que, aplicable como medio de control del uso de un vehículo motorizado tal como un automóvil, […]
DISPOSITIVO QUE GENERA ARCOS DE DESCARGA ELÉCTRICA POR PROXIMIDAD DE MANERA INTERMITENTE Y PROGRESIVA Y SU METODO DE FUNCIONAMIENTO, del 18 de Enero de 2018, de ROBAYO ROMERO, Rosa Elena: Dispositivo que genera arcos de descarga eléctrica por proximidad de manera intermitente y progresiva el cual es un circuito electrónico que trabaja en conjunto con un panel […]
SISTEMA DE CONTROL PARENTAL APLICABLE A MOTOCICLETAS, del 5 de Octubre de 2017, de TORROT ELECTRIC EUROPA, S.L: Sistema de control parental aplicable a motocicletas, que comprende: un controlador instalado en la motocicleta (M) y provisto de: - unas […]
SISTEMA DE CONTROL PARENTAL APLICABLE A MOTOCICLETAS, del 2 de Octubre de 2017, de TORROT ELECTRIC EUROPA, S.L: Sistema de control parental aplicable a motocicletas, que comprende: un controlador instalado en la motocicleta (M) y provisto de: - unas entradas para la captación […]