APARATO MANIPULADOR PARA UN ALMACÉN DE BULTOS SUELTOS AUTOMATIZADO.
Aparato manipulador para un almacén de bultos sueltos con superficies de almacenaje horizontales,
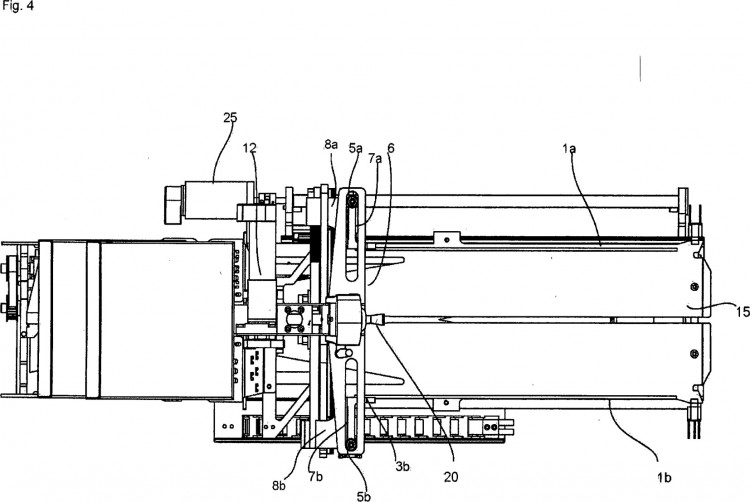
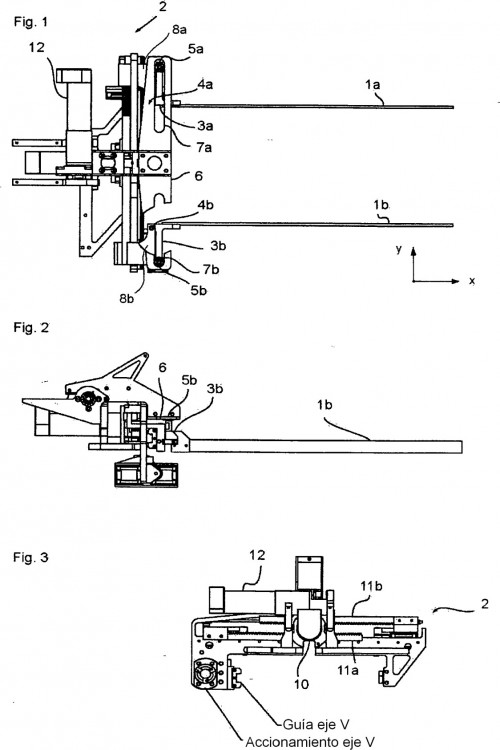
que mueve bultos sueltos, durante su introducción y extracción, en una primera dirección horizontal hacia las superficies de almacenaje o desde las superficies de almacenaje, y que presenta: una mesa de depósito (15) que puede posicionarse en la primera dirección horizontal (x) en una posición contigua a una superficie de almacenaje, para recibir al menos un bulto suelto y dos mordazas de apriete (1a, 1b, 3a, 3b) alargadas, dispuestas encima de la mesa de depósito y fijadas a un soporte (8a, 8b) respectivamente y cuyas superficies de apriete están orientadas unas hacia otras, estando acoplados los soportes con un primer accionamiento (25) para mover las mordazas de apriete juntos en la primera dirección horizontal (x), y acoplados con un segundo accionamiento (10, 11) para alejar y acercar las mordazas de apriete una respecto a otra en una segunda dirección horizontal (y) transversal con respecto a la primera dirección horizontal (x), de tal forma que al menos un bulto suelto puede sujetarse entre las superficies de apriete y moverse durante ello en la primera dirección horizontal (x), caracterizado porque al menos una de las dos mordazas de apriete está fijada al soporte (8a, 8b) mediante un cojinete giratorio, pudiendo pivotar alrededor de un eje de giro (4a, 4b), en el que, para transmitir movimientos de ajuste a la al menos una mordaza de apriete pivotante (1a, 1b, 3a, 3b), un tercer accionamiento (12) ataca, a través de al menos un elemento de acoplamiento (6, 7a, 7b), en un lugar situado a una distancia del eje de giro de la mordaza de apriete de tal forma que puede hacerla pivotar, comprendiendo el al menos un elemento de acoplamiento (6) un elemento de acoplamiento que transmite sólo movimientos de ajuste en la primera dirección horizontal (x), mientras que permite un movimiento relativo en la segunda dirección horizontal (y), de forma que la mordaza de apriete pivotante puede ser ajustada. en cuanto a su ángulo respecto a la otra mordaza de apriete, solamente por el tercer accionamiento (12), independientemente de su movimiento en la segunda dirección horizontal (y) y de la posición del segundo accionamiento (10, 11)
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E09153075.
Solicitante: ROWA AUTOMATISIERUNGSSYSTEME GMBH.
Nacionalidad solicitante: Alemania.
Dirección: ROWASTRASSE 1 - 3 53539 KELBERG ALEMANIA.
Inventor/es: WILLEMS, MARKUS.
Fecha de Publicación: .
Fecha Solicitud PCT: 18 de Febrero de 2009.
Clasificación Internacional de Patentes:
- B65G47/90 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B65 TRANSPORTE; EMBALAJE; ALMACENADO; MANIPULACION DE MATERIALES DELGADOS O FILIFORMES. › B65G DISPOSITIVOS DE TRANSPORTE O ALMACENAJE, p. ej. TRANSPORTADORES PARA CARGAR O BASCULAR, SISTEMAS TRANSPORTADORES PARA TALLERES O TRANSPORTADORES NEUMATICOS DE TUBOS (embalajes B65B; manipulación de material delgado o filiforme, p. ej. hojas de papel o fibras B65H; grúas B66C; aparatos de elevación o arrastre,p. ej. montacargas, B66D; dispositivos para elevar o bajar mercancías para carga y descarga, p. ej. carretillas elevadoras, B66F 9/00; vaciado de botellas, jarras, latas, barricas, barriles o contendores similares, no previstos en otro lugar, B67C 9/00; distribución o trasvase de líquidos B67D; llenado o descarga de contenedores para gases licuados, solidificados o comprimidos F17C; sistemas de conducción para fluídos F17D). › B65G 47/00 Dispositivos para manipular objetos o materiales asociados con los transportadores; Métodos de empleo de los dispositivos. › Dispositivos para coger o dejar los artículos o los materiales.
Clasificación PCT:
- B65G47/90 B65G 47/00 […] › Dispositivos para coger o dejar los artículos o los materiales.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
PDF original: ES-2356869_T3.pdf
Fragmento de la descripción:
La invención se refiere a un aparato manipulador según el preámbulo de la reivindicación 1.
Aparatos manipuladores de este tipo se conocen, por ejemplo, por el documento DE19955615C2 y por las publicaciones se solicitud DE102004025070A1 y EP1598291A2. Además, un aparato manipulador que presenta tanto una pinza de succión como mordazas de agarre se describió ya en la memoria de patente DE19509951C2. 5
Un aparato manipulador del tipo mencionado al principio se usa, por ejemplo, en un almacén de estanterías automatizado para pequeños bultos sueltos cuadrados, por ejemplo envases de medicamentos, en el que las superficies de almacenaje están formados por una pluralidad de baldas alargadas, dispuestas en una estantería, pudiendo desplazarse el aparato manipulador en dirección vertical y horizontal delante del lado frontal de una estantería o en un pasillo entre dos estanterías colocadas una enfrente de otra. Para sacar uno o varios bultos sueltos de una balda, el 10 aparato manipulador se desplaza a un lugar predeterminado de una balda predeterminada, posicionándose la mesa de depósito en el lado frontal delante de la balda. A continuación, las mordazas de apriete (que también se denominan mordazas de agarre) se desplazan al interior del compartimento de estantería, a ambos lados del bulto suelto que se ha de sacar o de los bultos sueltos que se han de sacar, y a continuación, se juntan agarrando el bulto suelto o los bultos sueltos y se vuelven a retirar del compartimento de estantería arrastrando el bulto suelto a la mesa de depósito. Para introducir un 15 bulto suelto en un compartimento de estantería, el bulto suelto, en primer lugar, se lleva a la mesa de depósito del aparato manipulador, después, el aparato manipulador se desplaza al lugar deseado delante de la balda, durante lo cual las dos mordazas de apriete están juntadas de tal forma que están en contacto con las superficies exteriores del bulto suelto. Después, las mordazas de apriete alargadas se separan ligeramente, de tal forma que el bulto suelto puede deslizarse entre las mordazas de apriete en dirección horizontal, pero que aún sigue siendo guiado por las mordazas de apriete y, 20 finalmente, se utiliza un empujador para empujar el bulto suelto de la mesa de depósito a la estantería, pasando entre las mordazas de apriete alargadas. También es posible dejar las mordazas de apriete apretadas a las superficies laterales del bulto suelto, mientras el bulto suelto está siendo empujado a la balda por el empujador. En este caso, unas guías de las mordazas de apriete sirven de guías durante la introducción del bulto suelto en la posición correcta, y cuando el bulto suelto se encuentra en la posición correcta sobre la balda, las mordazas de apriete vuelven a separarse y se retiran al 25 aparato manipulador.
En formas de realización alternativas, para extraer el bulto suelto de la balda a la mesa de depósito se utiliza una pinza de succión (por ejemplo, está dispuesto un cabezal de succión frontalmente en el empujador). La pinza de succión entra en el compartimento de estantería, succiona el bulto suelto que se ha de extraer y lo arrastra a la mesa de depósito. Eso se describe, por ejemplo, en el documento DE19509951C2. Este documento describe un aparato manipulador según 30 el preámbulo de la reivindicación 1. Evidentemente, en caso de una extracción de este tipo, se puede extraer del compartimento de estantería y retirar a la mesa de depósito siempre sólo un bulto suelto individual, a saber, el bulto suelto delantero.
En la publicación EP1598291A2 se describe además que mediante las mordazas de apriete también es posible arrastrar a la mesa de depósito del aparato manipulador simultáneamente varios bultos sueltos situados unos detrás de 35 otros en una superficie de almacenaje. Para ello, es preciso que el bulto suelto trasero de la fila de varios bultos sueltos que se han de arrastrar a la mesa de depósito tenga el mayor ancho, es decir, que todos los bultos sueltos situados por delante, que han de arrastrarse junto a él a la mesa de depósito, tengan un ancho menor o como máximo el mismo ancho.
Sin embargo, se ha mostrado que en la práctica, cuando varios bultos sueltos del mismo ancho han de arrastrarse simultáneamente de la superficie de almacenaje a la mesa de depósito, puede producirse el problema de que 40 las mordazas de apriete puedan agarrar de forma segura sólo uno de los bultos sueltos situados más cerca del borde delantero de la superficie de almacenaje, pero que no puedan agarrar de forma segura uno de los bultos sueltos situados por detrás, que también ha de extraerse, de modo que éste se queda en la superficie de almacenaje durante la salida de las mordazas de apriete. Esto puede suceder incluso si la superficie de contacto deformable elásticamente, descrita en la memoria de patente DE19955615C2 está prevista en las superficies interiores de las mordazas de apriete. Además, si con 45 el fin de aumentar la seguridad de agarre sobrepasa un ancho determinado, una capa de contacto de este tipo tiene la desventaja de que aumenta el ancho de las mordazas de apriete que entran en el compartimento de estantería y, por tanto, también tienen que aumentarse los huecos que se han de reservar entre bultos sueltos adyacentes, en los que deben entrar las mordazas de apriete, por lo que se malgasta espacio de almacenaje.
Por lo tanto, la invención tiene el objetivo de proporcionar un aparato manipulador que permita la extracción 50 simultánea de varios bultos sueltos dispuestos unos detrás de otros, que por ejemplo tienen el mismo ancho, y aumentar al mismo tiempo la seguridad de agarre.
Según la invención, este objetivo se consigue mediante un aparato manipulador con las características de la reivindicación 1. El aparato manipulador según la invención para un almacén de bultos sueltos con superficies de almacenaje horizontales, que para introducir y extraer los bultos sueltos los mueve en una primera dirección horizontal 55 hacia o desde las superficies de almacenaje, presenta una mesa de depósito que puede posicionarse en la primera
dirección horizontal en una posición contigua a una superficie de almacenaje para recibir al menos un bulto suelto, y dos mordazas de apriete alargadas, dispuestas por encima de la mesa de depósito y fijadas respectivamente a un soporte, con superficies de apriete (preferentemente planas) orientadas una hacia la otra. Las mordazas de apriete alargadas tienen tal longitud que, por una parte, tras extenderse, pueden agarrar el bulto suelto trasero, situado en una superficie de almacenaje, pero por otra parte, pueden retirarse completamente a una posición encima de la mesa de depósito. En caso 5 de su uso preferible en combinación con un almacén de estanterías automatizado, el aparato manipulador puede desplazarse preferentemente en dirección vertical y horizontal delante de un lado frontal de las estanterías. Los dos soportes están acoplados con un primer accionamiento para poder mover las mordazas de apriete junta en la primera dirección horizontal, y están acoplados con un segundo accionamiento para poder acercar y alejar las mordazas de apriete una respecto a otra en una segunda dirección horizontal, transversal respecto a la primera dirección horizontal, de modo 10 que al menos un bulto suelto puede sujetarse entre las superficies de apriete y moverse durante ello en una primera dirección horizontal. En caso del uso en combinación con un almacén de estanterías con baldas planas alargadas, la segunda dirección horizontal corresponde a la dirección longitudinal de las baldas. Según la invención, al menos una de las dos mordazas de apriete va fijada al soporte mediante un cojinete giratorio, pudiendo pivotar alrededor de un eje de giro. Un tercer accionamiento ataca, a través de al menos un elemento de acoplamiento para transmitir movimientos de 15 ajuste a la al menos una mordaza de apriete pivotante, en un lugar situado a una distancia de su eje de giro, de tal forma que puede hacer pivotar la mordaza de apriete. En los elementos de acoplamiento se trata, por ejemplo, de bielas de empuje o placas de empuje, palancas o combinaciones de cables de accionamiento y muelles de retroceso. La distancia entre el lugar en el que ataca el accionamiento a través de los elementos de acoplamiento y el eje de giro determina la palanca pivotante con la que el tercer accionamiento hace pivotar las mordazas de apriete. El lugar se encuentra en una 20 pieza discrecional, unida fijamente con la mordaza de apriete, y está definida, por ejemplo, por un apéndice o un taladro en dicha pieza. El al menos un elemento de acoplamiento comprende un elemento de acoplamiento que... [Seguir leyendo]
Reivindicaciones:
1. Aparato manipulador para un almacén de bultos sueltos con superficies de almacenaje horizontales, que mueve bultos sueltos, durante su introducción y extracción, en una primera dirección horizontal hacia las superficies de almacenaje o desde las superficies de almacenaje, y que presenta:
una mesa de depósito (15) que puede posicionarse en la primera dirección horizontal (x) en una posición contigua 5 a una superficie de almacenaje, para recibir al menos un bulto suelto y
dos mordazas de apriete (1a, 1b, 3a, 3b) alargadas, dispuestas encima de la mesa de depósito y fijadas a un soporte (8a, 8b) respectivamente y cuyas superficies de apriete están orientadas unas hacia otras, estando acoplados los soportes con un primer accionamiento (25) para mover las mordazas de apriete juntos en la primera dirección horizontal (x), y acoplados con un segundo accionamiento (10, 11) para alejar y acercar las mordazas de apriete una respecto a otra 10 en una segunda dirección horizontal (y) transversal con respecto a la primera dirección horizontal (x), de tal forma que al menos un bulto suelto puede sujetarse entre las superficies de apriete y moverse durante ello en la primera dirección horizontal (x),
caracterizado porque
al menos una de las dos mordazas de apriete está fijada al soporte (8a, 8b) mediante un cojinete giratorio, 15 pudiendo pivotar alrededor de un eje de giro (4a, 4b),
en el que, para transmitir movimientos de ajuste a la al menos una mordaza de apriete pivotante (1a, 1b, 3a, 3b), un tercer accionamiento (12) ataca, a través de al menos un elemento de acoplamiento (6, 7a, 7b), en un lugar situado a una distancia del eje de giro de la mordaza de apriete de tal forma que puede hacerla pivotar,
comprendiendo el al menos un elemento de acoplamiento (6) un elemento de acoplamiento que transmite sólo 20 movimientos de ajuste en la primera dirección horizontal (x), mientras que permite un movimiento relativo en la segunda dirección horizontal (y), de forma que la mordaza de apriete pivotante puede ser ajustada. en cuanto a su ángulo respecto a la otra mordaza de apriete, solamente por el tercer accionamiento (12), independientemente de su movimiento en la segunda dirección horizontal (y) y de la posición del segundo accionamiento (10, 11).
2. Aparato manipulador según la reivindicación 1, caracterizado porque cada una de las dos mordazas de apriete 25 (1a, 1b, 3a, 3b) está fijada a su soporte (8a, 8b) mediante un cojinete giratorio, pudiendo pivotar alrededor de un eje de giro (4a, 4b),
atacando un tercer accionamiento (12) común para ambas mordazas de apriete (1a, 1b, 3a, 3b), a través de al menos un elemento de acoplamiento común o respectivamente al menos un elemento de acoplamiento (6, 7a, 7b), en un lugar situado respectivamente a una distancia del eje de giro, de tal forma que puede hacer que las dos mordazas de 30 apriete pivoten en sentidos contrarios,
comprendiendo el elemento de acoplamiento o los elementos de acoplamiento (6) para las dos mordazas de apriete un elemento de acoplamiento que transmite sólo movimientos de ajuste en la primera dirección horizontal (x), mientras que permite un movimiento relativo en la segunda dirección horizontal (y), de forma que las mordazas de apriete pueden hacerse pivotar en su ángulo una respecto a la otra, solamente por el tercer accionamiento (12), 35 independientemente de su movimiento relativo en la segunda dirección horizontal (y).
3. Aparato manipulador según la reivindicación 2, caracterizado porque el tercer accionamiento (12) está dispuesto fuera de los dos soportes, de forma que debido al movimiento de los soportes en la segunda dirección horizontal (y) se producen movimientos relativos entre el tercer accionamiento (12) y los dos soportes, de forma que los elementos de acoplamiento para las dos mordazas de apriete comprenden respectivamente sólo un elemento de acoplamiento (6, 7a, 40 7b) que transmite sólo movimientos de ajuste en la primera dirección horizontal (x), mientras que permite un movimiento relativo en la segunda dirección horizontal (y).
4. Aparato manipulador según una de las reivindicaciones 1 a 3, caracterizado porque el lugar situado a una distancia del eje de giro (4a, 4b) de la mordaza de apriete (1a, 1b, 3a, 3b), en el que el tercer accionamiento (12) ataca a través de al menos un elemento de acoplamiento (6, 7a, 7b) de tal forma que puede hacer pivotar la mordaza de apriete, 45 se encuentra en un extremo de un brazo palanca (3a, 3b) unido con el cojinete giratorio.
5. Aparato manipulador según una de las reivindicaciones 1 a 4, caracterizado porque el elemento de acoplamiento que transmite sólo movimientos de ajuste en la primera dirección horizontal (x), mientras que permite un movimiento relativo en la segunda dirección horizontal (y), comprende una placa de empuje (6) que puede ser movida por el tercer accionamiento (12) linealmente de un lado a otro en la primera dirección horizontal (x) y que presenta un agujero 50 oblongo (7a, 7b) que se extiende en la segunda dirección horizontal (y) y en el que engrana un apéndice (5a, 5b) fijado a la mordaza de apriete.
6. Aparato manipulador según la reivindicación 5, caracterizado porque el apéndice es un rodillo guía (5a, 5b) que puede deslizarse dentro del agujero oblongo (7a, 7b).
7. Aparato manipulador según una de las reivindicaciones 1 a 4, caracterizado porque el elemento de acoplamiento que transmite sólo movimientos de ajuste en la primera dirección horizontal (x), mientras que permite un movimiento relativo en la segunda dirección horizontal (y), comprende una placa de empuje (6) que puede ser movida por 5 el tercer accionamiento linealmente de un lado a otro en la primera dirección horizontal (x) y que presenta un agujero oblongo que se extiende en la segunda dirección horizontal (y) y en el que engrana un apéndice fijado a otro elemento de acoplamiento montado en el soporte, transmitiendo el elemento de acoplamiento adicional el movimiento de ajuste a la mordaza de apriete correspondiente.
8. Aparato manipulador según una de las reivindicaciones 1 a 7, caracterizado porque los dos soportes y las 10 mordazas de apriete (1a, 1b, 3a, 3b) forman junto con el segundo (10, 11) y el tercer accionamiento (12) un módulo que con la ayuda del primer accionamiento (25) puede moverse en la primera dirección horizontal (x) encima de la mesa de depósito (15).
9. Aparato manipulador según una de las reivindicaciones 1 a 8, caracterizado porque encima de la mesa de depósito (15) y entre las mordazas de apriete (1a, 1b, 3a, 3b) está dispuesto un dispositivo de empuje (20) que puede 15 extenderse en la primera dirección horizontal (x) partiendo del lado de la mesa de depósito, opuesto a la superficie de almacenaje.
10. Aparato manipulador según la reivindicación 9, caracterizado porque el dispositivo de empuje (20) está acoplado con un cuarto accionamiento.
11. Aparato manipulador según la reivindicación 9 ó 10, caracterizado porque el dispositivo de empuje (20) presenta 20 un cabezal de succión para succionar un bulto suelto almacenado en una superficie de almacenaje y arrastrarlo a la mesa de depósito (15).
12. Aparato manipulador según una de las reivindicaciones anteriores, caracterizado porque las mordazas de apriete alargadas (1a, 1b, 3a, 3b) están hechas de un material elástico.
13. Aparato manipulador según una de las reivindicaciones anteriores, caracterizado porque las superficies de 25 apriete de las mordazas de apriete alargadas (1a, 1b, 3a, 3b) están recubiertas de un material antideslizante.
Patentes similares o relacionadas:
Estación automática para recoger artículos y procedimientos relacionados para usar, del 26 de Febrero de 2020, de CT PACK S.R.L.: Una estación automática para recoger artículos (A) que comprende: - un sistema de movimiento que comprende un transportador que define una superficie […]
 Dispositivo para cargar productos encuadernados, del 26 de Febrero de 2020, de Lee, Sin-Young: Un aparato para cargar productos encuadernados , que comprende:
una unidad de bastidor de soporte que proporciona una distancia para mover […]
Dispositivo para cargar productos encuadernados, del 26 de Febrero de 2020, de Lee, Sin-Young: Un aparato para cargar productos encuadernados , que comprende:
una unidad de bastidor de soporte que proporciona una distancia para mover […]
Mecanismo de suministro de boquilla de vertido y máquina de sellado de boquilla de vertido, del 12 de Febrero de 2020, de TOYO JIDOKI CO., LTD.: Un mecanismo de suministro de boquilla de vertido que comprende: un dispositivo de retención de boquilla de vertido para retener […]
Dispositivo para recoger y depositar selectivamente artículos en un almacén automático, del 12 de Febrero de 2020, de Modula S.p.A: Dispositivo para recoger y depositar selectivamente artículos, destinado a un almacén automático que comprende: un plano de soporte para el soporte temporal […]
Sistemas y métodos de transportador mecánico y envasado de alimentos, del 8 de Enero de 2020, de INTERCONTINENTAL GREAT BRANDS LLC: Un aparato de envasado de productos alimenticios que comprende: un transportador mecánico corriente arriba que transporta artículos […]
Dispositivo y método para transferir envases, del 23 de Octubre de 2019, de I.M.A. INDUSTRIA MACCHINE AUTOMATICHE S.P.A.: Dispositivo de transferencia para transferir envases de un dispositivo de avance de envases, en el que están alineados en al […]
DISPOSITIVO PARA RECOGER Y DESPRENDER MEDIOS ÓPTICOS, del 11 de Septiembre de 2019, de GLIFSTOCK, S.L: Dispositivo para recoger y desprender medios ópticos (Cds, DVDs y Blu-Rays), el cual se ha realizado en orden a obtener mayor facilidad y abaratar el posible mantenimiento […]
Cortadora de alto rendimiento con pinza adaptada por unión de materiales, del 7 de Agosto de 2019, de GEA Food Solutions Germany GmbH (100.0%): Cortadora de alto rendimiento que presenta una cuchilla que corta lonchas de producto alimenticio de uno de los extremos de […]