APARATO DE PLATAFORMA PARA SUBIR ESCALERAS.
Aparato con rueda inteligente que comprende: medios motrices acoplados a una rueda generalmente circular (100) para rotar la rueda en un buje (104) alrededor de un eje en una primera dirección,
la rueda define una circunferencia externa (101) que se mueve sobre una superficie de recorrido (110); un controlador (502) acoplado a los medios motrices; una pluralidad de mecanismos de radio sustancialmente extensibles radialmente (106) espaciados alrededor del buje y acoplados a la rueda (100) medios para mover un radio (108) en cada mecanismo de radio (106) entre una posición extendida y una posición retraída en respuesta a órdenes del controlador (502), en donde un extremo del radio (108) se extiende más allá de la circunferencia externa (101) de la rueda (100) cuando el radio se mueve a una posición extendida; caracterizado porque un sensor de obstáculos asociado con cada mecanismo de radio (106) y asociado al controlador (502), en donde cada sensor de obstáculo es capaz de determinar una distancia a la superficie de recorrido (110) y detectar una discontinuidad en la superficie de recorrido dentro de un campo de visión predeterminado (802), y en donde el controlador (502) calcula de manera operativa una superficie virtual sobre una discontinuidad detectada dentro de la superficie de recorrido (110) y una longitud de extensión de radio para cada mecanismo de radio (106) para extender su radio (108) de modo tal que la circunferencia externa (101) de la rueda (100) sigue sustancialmente la superficie virtual calculada (720) a medida que el aparato con rueda inteligente se mueve en la primera dirección
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/US2006/004818.
Solicitante: GAMMA TWO, INC.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 1185 HURON STREET DENVER, CO 80223 ESTADOS UNIDOS DE AMERICA.
Inventor/es: GUNDERSON,Louise, BROWN,Christian, GUNDERSON,James,P.
Fecha de Publicación: .
Fecha Solicitud PCT: 9 de Febrero de 2006.
Clasificación Internacional de Patentes:
- B62D49/06D3
- B62D57/02C
Clasificación PCT:
- B62D51/06 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B62 VEHICULOS TERRESTRES QUE SE DESPLAZAN DE OTRO MODO QUE POR RAILES. › B62D VEHICULOS DE MOTOR; REMOLQUES (dirección o guiado de máquinas o instrumentos agrícolas según un recorrido determinado A01B 69/00; ruedas, ruedecillas pivotantes, mejora de la adherencia de ruedas B60B; neumáticos para vehículos, inflado de neumáticos, cambio o reparación de neumáticos B60C; conexiones entre vehículos de un mismo tren o de un conjunto similar B60D; vehículos raíl-carretera, vehículos anfibios o transformables B60F; disposiciones de suspensión B60G; calefacción, refrigeración, ventilación u otros dispositivos de tratamiento del aire B60H; ventanas, parabrisas, techos descapotables, puertas o dispositivos similares, cubiertas de protección para vehículos fuera de servicio B60J; disposiciones de conjuntos de propulsión, accionamientos auxiliares, transmisiones, disposición de instrumentos o tableros de a bordo B60K; equipo eléctrico o propulsión de vehículos de tracción eléctrica B60L; alimentación de energía eléctrica para vehículos de tracción eléctrica B60M; disposiciones para pasajeros no previstas en otro lugar B60N; vehículos adaptados al transporte de cargas o para llevar cargas u objetos especiales B60P; adaptación de los dispositivos de señalización o de iluminación, su montaje o soporte, circuitos a este efecto, para vehículos en general B60Q; vehículos, equipos o partes de vehículos, no previstos en otro lugar B60R; servicio,limpieza, reparación, elevación o maniobra, no previstos en otro lugar B60S; frenos, sistemas de control de frenos o partes de estos sistemas B60T; vehículos de colchón de aire B60V; ciclos de motor, sus accesorios B62J, B62K; ensayo de vehículos G01M). › B62D 51/00 Vehículos de motor caracterizados por no estar sentado el conductor. › Tractores de tipo de eje único, acompañados a pie.
- B62D57/00 B62D […] › Vehículos caracterizados por medios de propulsión o de contacto con el suelo diferentes de ruedas y orugas, solos o complementando a las ruedas o a las orugas (trineos B62B; trineos de motor B62M).
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
PDF original: ES-2359429_T3.pdf

Fragmento de la descripción:
Antecedentes de la invención
Campo de la invención La presente invención hace referencia, en general, a vehículos y más particularmente a un vehículo de plataforma que puede salvar obstáculos tales como escaleras.
Descripción del arte relacionado
Actualmente, existen requerimientos cada vez más complejos de sistemas robóticos que desarrollen su actividad fuera de una planta de fábrica moderna. Un problema importante, en la actualidad, consiste en que las plataformas 10 con ruedas presentan dificultades para moverse sobre terrenos irregulares y atravesar obstáculos. Aunque se han realizado trabajos importantes en robots bípedos o de varias patas, estos sistemas normalmente tienen unos requerimientos de potencia mucho más elevados que las plataformas con ruedas. Las plataformas con ruedas son quizás los mecanismos más eficientes para moverse sobre cualquier superficie. Las plataformas con patas requieren de una potencia para mover la plataforma de manera horizontal sobre la superficie, y también requieren de una 15 potencia adicional tanto para soportar la plataforma como para elevar y mover las patas en sí. La rueda proporciona un soporte pasivo para la carga, anulando la necesidad de la potencia requerida para la elevación de la plataforma. Sin embargo, las ruedas sólo son eficientes si la superficie sobre la cual se desplazan es plana y relativamente lisa, y las ruedas fallan si hay obstáculos verticales o se presentan vacíos considerables en la superficie. Por lo tanto, las ruedas han demostrado su valor en ambientes cuidadosamente diseñados, y han fallado en dominios más complejos.
Tales terrenos irregulares pueden incluir discontinuidades verticales, peldaños y escaleras, y situaciones donde dichas superficies están cubiertas potencialmente con una variedad de obstáculos. Por ejemplo, si una rueda tradicional se acerca a un bordillo de la superficie de la vía, el bordillo podría presentar un obstáculo vertical, sobre el cual la rueda debería trepar. Dado que la única fuerza motriz en la rueda es el movimiento de giro hacia adelante, la geometría de la rueda y el bordillo tiene que convertir el movimiento hacia adelante en movimiento ascendente, y elevar así el centro de masa de la rueda. Si el radio de la rueda es lo suficientemente grande con respecto al bordillo, esta transferencia de energía es relativamente suave y efectiva. Sin embargo, a medida que el radio de la rueda se va acercando más a la altura del bordillo, la transferencia de energía se vuelve menos efectiva, hasta que la rueda no logra superar los obstáculos que exceden su radio. Actualmente no existe ningún mecanismo que proporcione soporte pasivo en general para una plataforma a la cual dicho soporte esté acoplado, que proporcione potencia para el movimiento sobre superficies y pueda proporcionar movimiento sobre una gran variedad de superficies, incluyendo aquellas que se encuentran en terrenos irregulares, ambientes urbanos, en interiores, y entornos irregulares o de desarrollo parcial.
El documento US 5492390, que forma la parte de la pre-caracterización de la reivindicación 1, revela una rueda de geometría variable donde cada radio está conectado a un reborde flexible. Mientras que el reborde tiene una circunferencia fija, la forma de la rueda puede alterarse mediante el cambio continuo de las longitudes de las barras del pistón a medida que la rueda gira. De hecho, el “sistema sensor” revelado sólo se utiliza para determinar la posición y longitud actual de cada una de las barras del pistón de modo tal que un ordenador puede calcular la tasa de extensión/retracción requerida para cada barra del pistón dada una forma de rueda y velocidad de rotación
40 deseadas. Además, este documento revela que la forma de la rueda se selecciona de manera manual (por ejemplo, por el conductor de un vehículo) o de forma automática en respuesta a las condiciones del suelo (por ejemplo, redonda para el pavimento y oval para condiciones arenosas). Por lo tanto, el arte citado no revela ni expone la utilización de sensores de obstáculos, ni la extensión resultante de uno o más radios para salvar tales obstáculos.
Resumen de la invención
45 Con este escenario se han desarrollado las realizaciones de la presente invención. Una realización de la presente invención es un aparato de plataforma con ruedas que incorpora una configuración de rueda inteligente para cada rueda, en la cual cada rueda puede cambiar de forma dinámica su radio para salvar diferentes obstáculos. La rueda inteligente tiene un buje giratorio preferentemente sujetado a un disco de soporte que tiene una serie de mecanismos de radios extensibles de soporte de carga, alrededor del buje que pueden extenderse de manera
50 controlable y retraerse de forma radial en respuesta a la superficie del terreno anticipada sobre la cual se desplazará la rueda. El buje de la plataforma con ruedas porta un microcontrolador, sensores de posición, preferentemente una serie de sensores de proximidad de obstáculos y sensores de fuerza, y un suministro apropiado de energía eléctrica para la operación de los mecanismos de radios y componentes de control.
El buje funciona como punto de montaje para la rueda inteligente y, en una realización, un disco sujetado al buje proporciona apoyo estructural para los otros componentes tales como por ejemplo cada mecanismo de rueda retráctil incluyendo un sensor de proximidad, sensor de distancia y detector de fuerza para cada radio. La parte central del buje está conectada mecánicamente, de manera preferente, a un eje motriz para proporcionar fuerza 5 motriz rotativa para el vehículo de plataforma. Además del mecanismo de acoplamiento, la parte central del buje puede proporcionar de manera opcional una conexión eléctrica desde una fuente de alimentación montada sobre la plataforma del vehículo para proporcionar energía eléctrica a los componentes eléctricos montados en el buje. En la rueda inteligente conforme a una realización de la presente invención, los radios son activos. Estos radios activos se extienden y retraen en respuesta a las señales de fuerza, distancia y posición de los diferentes sensores conectados con cada mecanismo de radio. Estos mecanismos de radios están controlados por un microprocesador automatizado o sistema de control por microcontrolador que puede montarse en la propia rueda o plataforma del vehículo. Esto permite que la rueda se adapte y franquee obstáculos y huecos en la superficie sobre la cual se desplaza.
Estas y otras características, ventajas y objetos de la invención serán evidentes a partir de la lectura de la siguiente 15 descripción detallada considerada conjuntamente con los dibujos adjuntos.
Breve descripción de los dibujos
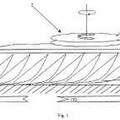
La figura 1 es una vista en perspectiva de una realización de una rueda conforme a la presente invención, con todos los radios extendidos con fines ilustrativos.
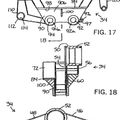
La figura 2 es una vista lateral representativa simplificada de la rueda que se muestra en la figura 1. La figura 3 es una vista en perspectiva separada de un mecanismo de radios a modo de ejemplo para la rueda que se muestra en la figura 1.
La figura 4 es una vista lateral parcial ampliada de uno de los mecanismo montados en la rueda que se muestra en la figura 1.
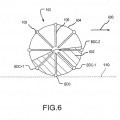
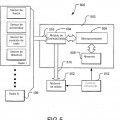
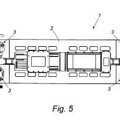
La figura 5 es un diagrama de bloques del controlador de la rueda conforme a la presente invención. La figura 6 es una representación operativa esquemática de una rueda conforme a la presente invención.
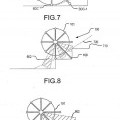
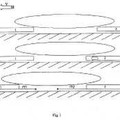
La figura 7 es una representación de la rueda que se muestra en la figura 6 cuando se acerca a un escalón.
La figura 8 es una representación de la rueda que se muestra en la figura 6 después de subir el escalón que se muestra en la figura 7.
La figura 9 es una representación operativa esquemática de una rueda como en la figura 6 cuando la rueda se 30 acerca a un escalón hacia abajo.
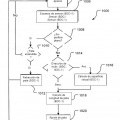
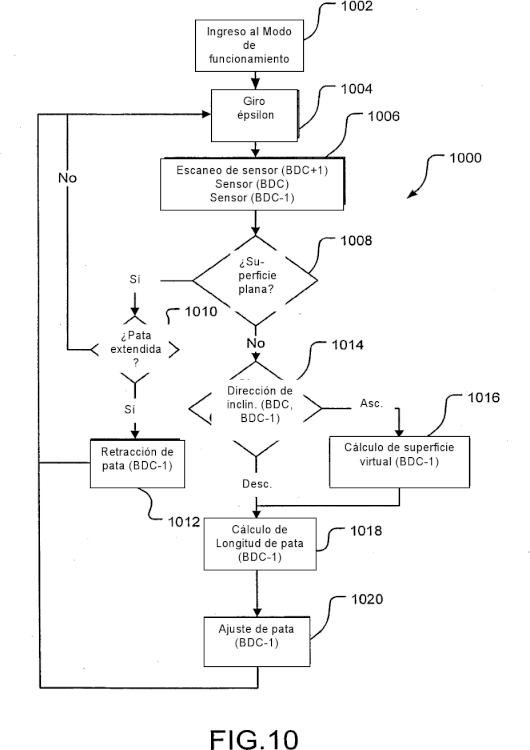
La figura 10 es un diagrama de flujo de control operativo para el controlador cuando se encuentra controlando el posicionamiento de un radio de soporte de carga en el punto muerto inferior.
La figura 11 es un diagrama de flujo de control operativo para el controlador cuando se encuentra controlando el posicionamiento de un radio que se acerca al punto muerto inferior. Descripción detallada de la invención
Una rueda inteligente 100 conforme a una realización de la presente invención se muestra en las figuras 1-9. Con referencia a la figura 1, esta rueda 100 tiene una... [Seguir leyendo]
Reivindicaciones:
1. Aparato con rueda inteligente que comprende:
medios motrices acoplados a una rueda generalmente circular (100) para rotar la rueda en un buje (104) alrededor de un eje en una primera dirección, la rueda define una circunferencia externa (101) que se mueve sobre una superficie de recorrido (110);
un controlador (502) acoplado a los medios motrices;
una pluralidad de mecanismos de radio sustancialmente extensibles radialmente (106) espaciados alrededor del buje y acoplados a la rueda (100)
medios para mover un radio (108) en cada mecanismo de radio (106) entre una posición extendida y una posición retraída en respuesta a órdenes del controlador (502), en donde un extremo del radio (108) se extiende más allá de la circunferencia externa (101) de la rueda (100) cuando el radio se mueve a una posición extendida; caracterizado porque
un sensor de obstáculos asociado con cada mecanismo de radio (106) y asociado al controlador (502), en donde cada sensor de obstáculo es capaz de determinar una distancia a la superficie de recorrido (110) y detectar una discontinuidad en la superficie de recorrido dentro de un campo de visión predeterminado (802), y
en donde el controlador (502) calcula de manera operativa una superficie virtual sobre una discontinuidad detectada dentro de la superficie de recorrido (110) y una longitud de extensión de radio para cada mecanismo de radio (106) para extender su radio (108) de modo tal que la circunferencia externa (101) de la rueda (100) sigue sustancialmente la superficie virtual calculada (720) a medida que el aparato con rueda inteligente se mueve en la primera dirección.
2. Aparato conforme a la reivindicación 1, en donde ejes de los radios (108) pasan por el centro de la rueda (100).
3. Aparato conforme a la reivindicación 1, en donde los ejes de los radios (108) son paralelos a un radio a través del centro de la rueda (100).
4. Aparato conforme a la reivindicación 1, en donde el controlador (502) calcula la superficie virtual (720) a partir de al menos una señal del sensor asociado a un mecanismo de radio hacia adelante de una posición BDC en el punto muerto inferior de la rueda y una señal del sensor asociado a un mecanismo de radio en una posición posterior al BDC.
5. Aparato conforme a la reivindicación 4, en donde el mecanismo de radio hacia adelante de la posición BDC está en una posición BDC-1.
6. Aparato conforme a la reivindicación 5, en donde el controlador (502) calcula una distancia desde el extremo del radio (108) en el mecanismo de radio en una posición BDC-1 a la superficie de recorrido (110) para determinar la longitud de extensión del radio.
7. Aparato conforme a la reivindicación 6, en donde el controlador (502) calcula de manera repetida la longitud de extensión del radio para el mecanismo de radio en una posición BDC-1 hasta que el mecanismo de radio alcanza el BDC.
8. Aparato conforme a la reivindicación 1, en donde la superficie virtual (720) es sustancialmente plana.
9. Aparato conforme a la reivindicación 1, en donde
el controlador (502) también comprende un controlador de sistema reactivo continuo de detección-plan-acción.
10. Aparato conforme a la reivindicación 1, en donde la discontinuidad detectada dentro de la superficie de recorrido
(110) comprende una discontinuidad vertical positiva o negativa.
11. Aparato conforme a la reivindicación 10, en donde la discontinuidad detectada dentro de la superficie de recorrido (110) comprende un peldaño.
12. Aparato conforme a la reivindicación 5, en donde:
el mecanismo de radio en la posición después del BDC está en una posición BDC+1;
el mecanismo de radio hacia adelante de la posición BDC-1 está en una posición BDC-2; y
los sensores de obstáculos asociados con los mecanismos de radios en las posiciones BDC-2, BDC-1, BDC y BDC+1 se activan para buscar discontinuidades dentro de la superficie de recorrido (110), mientras que los 5 sensores de obstáculos asociados con una pluralidad restante de mecanismos de radios que caen por fuera de las posiciones BDC-2, BDC-1, BDC y BDC+1 se desactivan para ahorrar energía.
13. Aparato conforme a la reivindicación 12, en donde los radios (108) para cada uno de la pluralidad restante de mecanismos de radios que caen por fuera de las posiciones BDC-2, BDC-1, BDC y BDC+1 se mueven a una posición retraída.
14. Aparato conforme a la reivindicación 12, que además comprende un sensor de orientación angular para determinar cuál de la pluralidad de mecanismos de radios está ubicado en las posiciones BDC-2, BDC-1, BDC y BDC+1.
15. Aparato conforme a la reivindicación 1, que además comprende un sensor de fuerza asociado con cada
mecanismo de radio (106) para proporcionar datos al controlador (502) sobre al menos una de una fuerza lateral y 15 una fuerza de elevación aplicada a cada radio (108).
Patentes similares o relacionadas:
UNIDAD DE DESPLAZAMIENTO TIPO ORUGA, del 6 de Febrero de 2012, de KUBOTA CORPORATION: Una unidad de desplazamiento tipo oruga que comprende: una caja del eje trasero de un cuerpo de la máquina de desplazamiento ; un tren de rodaje de la oruga […]
 BASTIDOR PARA APARATOS DE ORUGA, del 28 de Octubre de 2010, de ATI INC.: Un aparato de oruga que incluye (a) una oruga flexible continua que tiene tramos superior e inferior y una superficie interior, (b) una pluralidad […]
BASTIDOR PARA APARATOS DE ORUGA, del 28 de Octubre de 2010, de ATI INC.: Un aparato de oruga que incluye (a) una oruga flexible continua que tiene tramos superior e inferior y una superficie interior, (b) una pluralidad […]
Chasis de vehículo articulado, del 29 de Julio de 2020, de SAUDI ARABIAN OIL COMPANY: Un chasis de vehículo robótico , que comprende: - una primera sección de chasis ; - una segunda sección de chasis ; - una unión articulada […]
Chasis del vehículo articulado, del 19 de Noviembre de 2018, de SAUDI ARABIAN OIL COMPANY: Un chasis de un vehículo robotizado para realizar movimientos a lo largo de una superficie ferromagnética y/o magnéticamente inducible, […]
 Dispositivo de tracción inercial, del 16 de Abril de 2013, de FALESIEDI, OSVALDO: Dispositivo de tracción que comprende un elemento de soporte (1, 1') que comprende una superficie inferior (1a,1'a) que tiene un coeficiente de fricción diferente de acuerdo […]
Dispositivo de tracción inercial, del 16 de Abril de 2013, de FALESIEDI, OSVALDO: Dispositivo de tracción que comprende un elemento de soporte (1, 1') que comprende una superficie inferior (1a,1'a) que tiene un coeficiente de fricción diferente de acuerdo […]
 Método y dispositivo de tracción por impulsos, del 19 de Marzo de 2013, de FALESIEDI, OSVALDO: Dispositivo de tracción por impulsos que comprende por lo menos un primer elemento de soporte (1, 1', 1") y unsegundo elemento de soporte (2, 2', 2") que pueden moverse de forma […]
Método y dispositivo de tracción por impulsos, del 19 de Marzo de 2013, de FALESIEDI, OSVALDO: Dispositivo de tracción por impulsos que comprende por lo menos un primer elemento de soporte (1, 1', 1") y unsegundo elemento de soporte (2, 2', 2") que pueden moverse de forma […]
 PLATAFORMA DE TRANSPORTE O VEHÍCULO SIMILAR CON MOVIMIENTO OMNIDIRECCIONAL PARA TRASLADO DE CARGAS VOLUMINOSAS, del 28 de Noviembre de 2012, de ARITEX CADING, S.A.: Plataforma de transporte o vehículo similar con movimiento omnidireccional para traslado de cargas voluminosas, de estructura portante cuyo sistema motriz está […]
PLATAFORMA DE TRANSPORTE O VEHÍCULO SIMILAR CON MOVIMIENTO OMNIDIRECCIONAL PARA TRASLADO DE CARGAS VOLUMINOSAS, del 28 de Noviembre de 2012, de ARITEX CADING, S.A.: Plataforma de transporte o vehículo similar con movimiento omnidireccional para traslado de cargas voluminosas, de estructura portante cuyo sistema motriz está […]
 SILLA DE RUEDAS PARA DISMINUIDOS CON DISPOSITIVO ELECTRO-MECANICO, QUE PERMITE SUBIR Y BAJAR ESCALERAS Y RAMPAS, del 11 de Mayo de 2012, de MADUEÑO CASTRO, LUIS: Silla de ruedas para disminuidos, con dispositivo electro-mecánico, que permite subir y bajar escaleras y rampas , dotada con: cuatro pistones horizontales y , […]
SILLA DE RUEDAS PARA DISMINUIDOS CON DISPOSITIVO ELECTRO-MECANICO, QUE PERMITE SUBIR Y BAJAR ESCALERAS Y RAMPAS, del 11 de Mayo de 2012, de MADUEÑO CASTRO, LUIS: Silla de ruedas para disminuidos, con dispositivo electro-mecánico, que permite subir y bajar escaleras y rampas , dotada con: cuatro pistones horizontales y , […]