Método y dispositivo de tracción por impulsos.
Dispositivo de tracción por impulsos que comprende por lo menos un primer elemento de soporte (1,
1', 1") y unsegundo elemento de soporte (2, 2', 2") que pueden moverse de forma recíproca entre una posición proximal y unaposición distal; teniendo cada elemento de soporte un coeficiente de rozamiento variable con respecto a unasuperficie de soporte (S, W), de tal modo que durante un movimiento de aproximación recíproco predomina unafuerza de rozamiento (Ff1) desarrollada por uno de dichos elementos de soporte (Ff1 >Ff2, Ff1< f2) y durante unmovimiento de alejamiento recíproco de dichos elementos de soporte predomina una fuerza de rozamiento (Ff2)desarrollada por el otro de dichos elementos de soporte (Ff1< f2, Ff1 >Ff2), en el que dicho coeficiente derozamiento es anisótropo a lo largo de una dirección de movimiento recíproca (V) de dichos elementos de soporte(1, 1', 1", 2, 2', 2"), en el que dichos elementos de soporte comprenden una pluralidad de elementos deextremidades largas (4), que sobresalen a partir de las respectivas superficies inferiores (1'a, 2'a) y que estáninclinados de acuerdo con un ángulo adecuado contenido en un plano perpendicular a dichas superficies (1'a, 2'a)de dichos elementos de soporte, caracterizado por que cada elemento de soporte (1, 1', 1", 2, 2', 2") comprendeuna primera placa (10) a partir de la cual sobresalen dichos elementos de extremidades largas (4) y una segundaplaca (11) colocada por debajo de dicha primera placa que comprende tantos orificios pasantes como elementos deextremidades largas hay; pasando dichos elementos de extremidades largas (4) a través de dichos orificiospasantes; siendo dicha segunda placa adecuada para trasladarse con respecto a dicha primera placa con el fin dedeterminar una variación del ángulo de inclinación de dichos elementos de extremidades largas (4).
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E10425007.
Solicitante: FALESIEDI, OSVALDO.
Nacionalidad solicitante: Italia.
Dirección: Via Cimabue 3 10080 San Benigno Canavese ITALIA.
Inventor/es: FALESIEDI,OSVALDO.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B62D57/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B62 VEHICULOS TERRESTRES QUE SE DESPLAZAN DE OTRO MODO QUE POR RAILES. › B62D VEHICULOS DE MOTOR; REMOLQUES (dirección o guiado de máquinas o instrumentos agrícolas según un recorrido determinado A01B 69/00; ruedas, ruedecillas pivotantes, mejora de la adherencia de ruedas B60B; neumáticos para vehículos, inflado de neumáticos, cambio o reparación de neumáticos B60C; conexiones entre vehículos de un mismo tren o de un conjunto similar B60D; vehículos raíl-carretera, vehículos anfibios o transformables B60F; disposiciones de suspensión B60G; calefacción, refrigeración, ventilación u otros dispositivos de tratamiento del aire B60H; ventanas, parabrisas, techos descapotables, puertas o dispositivos similares, cubiertas de protección para vehículos fuera de servicio B60J; disposiciones de conjuntos de propulsión, accionamientos auxiliares, transmisiones, disposición de instrumentos o tableros de a bordo B60K; equipo eléctrico o propulsión de vehículos de tracción eléctrica B60L; alimentación de energía eléctrica para vehículos de tracción eléctrica B60M; disposiciones para pasajeros no previstas en otro lugar B60N; vehículos adaptados al transporte de cargas o para llevar cargas u objetos especiales B60P; adaptación de los dispositivos de señalización o de iluminación, su montaje o soporte, circuitos a este efecto, para vehículos en general B60Q; vehículos, equipos o partes de vehículos, no previstos en otro lugar B60R; servicio,limpieza, reparación, elevación o maniobra, no previstos en otro lugar B60S; frenos, sistemas de control de frenos o partes de estos sistemas B60T; vehículos de colchón de aire B60V; ciclos de motor, sus accesorios B62J, B62K; ensayo de vehículos G01M). › Vehículos caracterizados por medios de propulsión o de contacto con el suelo diferentes de ruedas y orugas, solos o complementando a las ruedas o a las orugas (trineos B62B; trineos de motor B62M).
- B62D57/02 B62D […] › B62D 57/00 Vehículos caracterizados por medios de propulsión o de contacto con el suelo diferentes de ruedas y orugas, solos o complementando a las ruedas o a las orugas (trineos B62B; trineos de motor B62M). › con medios de propulsión en contacto con el suelo, p. ej. por piernas mecánicas.
- B62D57/024 B62D 57/00 […] › Vehículos de orugas especialmente adaptados para desplazarse sobre superficies inclinadas o verticales (vehículos oruga para subir o bajar escaleras B62D 55/075; coches que permiten subir o bajar un tramo de escalera B62B 5/02).
PDF original: ES-2398518_T3.pdf
Fragmento de la descripción:
Método y dispositivo de tracción por impulsos
Campo de la invención [0001] La presente invención se refiere a un método y dispositivo de tracción por impulsos, adecuados para cualquier entorno gravitatorio.
Descripción de la técnica anterior
De acuerdo con la técnica anterior, existen dos sistemas de tracción para vehículos terrestres o, en cualquier caso, para vehículos adecuados para moverse en sistemas gravitatorios: sistema de tracción sobre ruedas (neumáticos, hierro, etc.) y sistema de tracción sobre orugas.
A pesar de que los sistemas de tracción sobre orugas son los más adecuados sobre suelos particularmente blandos, los mismos no son adecuados sobre superficies delicadas, sobre todo cuando sea necesario proteger el suelo, tal como, por ejemplo, en excavaciones arqueológicas.
Además, ambos sistemas de tracción son poco adecuados cuando es necesario escalar por encima de un obstáculo con unas dimensiones considerables, sobre todo cuando el obstáculo no deba sufrir daños.
En el documento DE2101375, que describe el preámbulo de la reivindicación 1, se dan ejemplos de dispositivos de la técnica anterior.
Sumario de la invención [0006] El fin de la presente invención es la provisión de un dispositivo de tracción por impulsos adecuado para solucionar la totalidad de los problemas que se han expuesto anteriormente.
El objeto de la presente invención es un dispositivo de tracción por impulsos de acuerdo con la reivindicación 1.
Un fin adicional de la presente invención es la provisión de un método de tracción por impulsos, adecuado 35 para solucionar la totalidad de los problemas que se han expuesto anteriormente.
El objeto de la presente invención es también un método de tracción por impulsos, de acuerdo con la reivindicación 16.
Las reivindicaciones dependientes describen las realizaciones preferidas de la invención, y son una parte integral de la presente descripción.
Breve descripción de las figuras 45 [0011] Características y ventajas adicionales de la invención serán más evidentes a la luz de una descripción detallada de una realización preferida, pero no exclusiva, de un método y dispositivo de tracción por impulsos, que se muestra con la ayuda de los dibujos que se adjuntan al presente documento, los cuales son meramente ilustrativos y no limitativos, en los que:
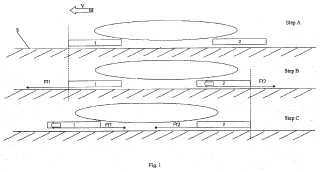
la figura 1 muestra tres etapas de una secuencia de movimiento hacia delante del dispositivo de acuerdo con la presente invención; la figura 2 muestra un prototipo que incluye el dispositivo de la figura 1; las figuras 3a y 3b muestran la invención como una realización alternativa del dispositivo en la figura 2; la figura 4 muestra una realización alternativa adicional del dispositivo en la figura 3;
la figura 5 muestra una realización alternativa que incluye las soluciones que se muestran en las figuras previas; la figura 6 muestra una realización alternativa de la invención que es particularmente adecuada para el movimiento en agua.
En los dibujos, los mismos números y letras de referencia identifican los mismos elementos o componentes.
Descripción detallada de una realización preferida de la invención [0013] Un dispositivo de tracción por impulsos de acuerdo con una primera realización alternativa de la presente invención comprende por lo menos un par 1 y 2 de elementos de soporte que pueden moverse de forma recíproca 65 entre una posición proximal y una distal a lo largo de una dirección de movimiento. Cada uno de dichos elementos de soporte tiene un coeficiente de rozamiento diferente con respecto a una superficie de soporte S de acuerdo con dos sentidos opuestos de la misma dirección de movimiento.
Con referencia a la figura 1, la primera etapa, etapa A, representa un momento en el que el dispositivo es estacionario y dichos elementos de soporte 1 y 2 se encuentran en una posición distal recíproca.
Durante una etapa de aproximación recíproca, etapa B de la figura 1, de dichos elementos de soporte, un primer elemento 1 (o 2) de dichos elementos de soporte desarrolla una primera fuerza de rozamiento Ff1 la cual hace al elemento solidario con dicha superficie de soporte S, mientras que un segundo elemento 2 (o 1) de dichos elementos de soporte desarrolla una segunda fuerza de rozamiento Ff1 que es más baja que dicha primera fuerza de rozamiento, a saber, Ff1 > Ff2, deslizando dicho segundo elemento de soporte hacia dicho primer elemento de soporte sobre dicha superficie de soporte S. Durante una etapa de alejamiento recíproco, etapa C de la figura 1, la fuerza de rozamiento Ff2 desarrollada por dicho segundo elemento de soporte es más alta que la fuerza de rozamiento Ff1 desarrollada por dicho primer elemento de soporte, a saber, Ff2 > Ff1, por lo tanto, dicho primer elemento 1 (o 2) se empuja hacia delante, véase la flecha V en las figuras, y el dispositivo de tracción se mueve hacia delante a lo largo de dicha dirección de movimiento.
De acuerdo con el ejemplo mostrado, los dos elementos de soporte tienen una anisotropía de rozamiento con respecto a dicha superficie de soporte, con la misma dirección recíproca hacia V, y de otro modo el dispositivo no se movería hacia delante, sino que oscilaría entre dos posiciones con respecto a dicha superficie de soporte S.
La descripción muestra también, con claridad, que dicha anisotropía de rozamiento debería estar, por lo menos en parte, alineada con dicha dirección de contracción y extensión de los dos elementos de soporte 1 y 2.
La figura 2 muestra un prototipo del dispositivo de tracción de acuerdo con la presente invención.
Un primer par de elementos de soporte 1’ y 2’ se asocian por medio de un par de electroimanes que tienen una configuración en contrafase (“push-pull”) , siendo cada uno de los mismos solidario con uno de dichos elementos de soporte 1’ y 2’, de tal modo que su acción simultánea es de contracción y extensión recíprocas. En particular, los dos electroimanes 3 están asociados con dos extremos opuestos de un elemento de interconexión 31, por ejemplo un eje. Un resorte espiral 32, devanado alrededor de dicho eje 31, determina la extensión del dispositivo de tracción cuando dichos electroimanes están desactivados. Por lo tanto, cuando los dos electroimanes están activados, estos atraen a dicho eje 31 desde ambos lados, determinando la compresión del resorte 32 concomitante con la contracción del dispositivo de tracción. Por lo tanto, dichos medios elásticos son adecuados para oponerse a la acción de aproximación (o de alejamiento) de dichos medios de aproximación o de alejamiento 3 y para hacer que los dos elementos de soporte vuelvan a la posición distal (o proximal) cuando los dos elementos de aproximación están desactivados.
De acuerdo con otra realización alternativa, el resorte espiral 32 hace que los dos elementos de soporte 1’ y 2’ se aproximen cuando dichos electroimanes están desactivados mientras que, cuando dichos electroimanes están activados, los mismos ejercen una acción de aproximación sobre dichos elementos de soporte 1’ y 2’.
De acuerdo con la realización alternativa que se muestra en las figuras 2 y 5, dicho coeficiente de rozamiento anisótropo se consigue por medio de una pluralidad de elementos de extremidades largas 4, que sobresalen a partir de las superficies inferiores 1’a y 2’a de dichos elementos de soporte, orientados hacia la superficie de soporte S y
que están inclinados, preferentemente todos de la misma forma, con un ángulo adecuado contenido en un plano perpendicular a dichas superficies inferiores 1’a y 2’a de dichos elementos de soporte. Preferentemente, dicho plano, perpendicular a dichas superficies inferiores 1’a y 2’a, es paralelo a dicha dirección de aproximación/alejamiento de dichos elementos de soporte y, por lo tanto, a dicha dirección de movimiento del dispositivo de tracción.
Dando unos pliegues apropiados a dichos elementos de extremidades largas 4, tal como se muestra en la figura 2, los propios elementos se vuelven particularmente flexibles, por lo tanto, cuando la contracción y la extensión tienen lugar a unas frecuencias predeterminadas, el dispositivo de tracción no se desliza a lo largo de la superficie de soporte S, sino que el mismo puede saltar y, por lo tanto, puede escalar por encima de obstáculos, incluso con unas dimensiones considerables. Por otro lado, cuando la contracción y la extensión tienen lugar a otras 55 frecuencias, el dispositivo de tracción se mueve de una forma bastante continua, hasta el punto de que no es posible ver la contracción/distensión... [Seguir leyendo]
Reivindicaciones:
1. Dispositivo de tracción por impulsos que comprende por lo menos un primer elemento de soporte (1, 1’, 1”) y un segundo elemento de soporte (2, 2’, 2”) que pueden moverse de forma recíproca entre una posición proximal y una 5 posición distal; teniendo cada elemento de soporte un coeficiente de rozamiento variable con respecto a una superficie de soporte (S, W) , de tal modo que durante un movimiento de aproximación recíproco predomina una fuerza de rozamiento (Ff1) desarrollada por uno de dichos elementos de soporte (Ff1 > Ff2, Ff1 < f2) y durante un movimiento de alejamiento recíproco de dichos elementos de soporte predomina una fuerza de rozamiento (Ff2) desarrollada por el otro de dichos elementos de soporte (Ff1 < f2, Ff1 > Ff2) , en el que dicho coeficiente de rozamiento es anisótropo a lo largo de una dirección de movimiento recíproca (V) de dichos elementos de soporte (1, 1’, 1”, 2, 2’, 2”) , en el que dichos elementos de soporte comprenden una pluralidad de elementos de extremidades largas (4) , que sobresalen a partir de las respectivas superficies inferiores (1’a, 2’a) y que están inclinados de acuerdo con un ángulo adecuado contenido en un plano perpendicular a dichas superficies (1’a, 2’a) de dichos elementos de soporte, caracterizado por que cada elemento de soporte (1, 1’, 1”, 2, 2’, 2”) comprende una primera placa (10) a partir de la cual sobresalen dichos elementos de extremidades largas (4) y una segunda placa (11) colocada por debajo de dicha primera placa que comprende tantos orificios pasantes como elementos de extremidades largas hay; pasando dichos elementos de extremidades largas (4) a través de dichos orificios pasantes; siendo dicha segunda placa adecuada para trasladarse con respecto a dicha primera placa con el fin de determinar una variación del ángulo de inclinación de dichos elementos de extremidades largas (4) .
2. Dispositivo de acuerdo con la reivindicación 1, en el que dicho coeficiente de rozamiento varía a lo largo del tiempo de acuerdo con dichas acciones de aproximación y de alejamiento.
3. Dispositivo de acuerdo con la reivindicación 2, en el que el coeficiente de rozamiento de dicho primer elemento de
soporte o de dicho segundo elemento de soporte aumenta antes de un movimiento de alejamiento recíproco de dichos elementos de soporte y disminuye inmediatamente después de esto y en el que el coeficiente de rozamiento de dicho segundo elemento de soporte o primer elemento de soporte aumenta antes de un movimiento de aproximación recíproco de dichos elementos de soporte.
4. Dispositivo de acuerdo con la reivindicación 1, en el que dichos elementos de extremidades largas se fabrican de metal y/o de un material sintético.
5. Dispositivo de acuerdo con la reivindicación 4, en el que una primera parte (4) de dichos elementos de extremidades largas es más rígida que una segunda parte (4’) de dichos elementos de extremidades largas y en el
que dicha segunda parte (4’) comprende unos elementos de extremidades largas más largos que los elementos de extremidades largas comprendidos en dicha primera parte.
6. Dispositivo de acuerdo con las reivindicaciones anteriores, que además comprende unos medios de aproximación y/o de alejamiento (3) de dichos elementos de soporte (1, 1’, 1”, 2, 2’, 2”) del tipo de combustión electromecánica y/o mecánica y/o neumática y/o interna y por lo menos un elemento de interconexión (31) de dichos elementos de soporte.
7. Dispositivo de acuerdo con la reivindicación 6, en el que dichos medios de aproximación y/o de alejamiento (3)
son adecuados para determinar un movimiento de aproximación/alejamiento de acuerdo con una pluralidad de 45 frecuencias diferentes.
8. Dispositivo de acuerdo con las reivindicaciones 6 o 7, que además comprende unos medios elásticos (32) adecuados para oponerse a la acción de dichos medios de aproximación o de alejamiento de dichos elementos de soporte (1, 1’, 1”, 2, 2’, 2”) .
9. Dispositivo de acuerdo con cualquiera de las reivindicaciones anteriores, en el que un primer par de elementos de soporte (1, 1’, 1”, 2, 2’, 2”) que pueden moverse de forma recíproca y conectados por medio de dicho elemento de interconexión (31) está asociado con un segundo par de elementos de soporte, independiente de dicho primer par y que comprende un segundo elemento de interconexión (31’) , realizándose dicha asociación por medio de un puente
transversal (33) solidario con dichos elementos de interconexión (31, 31’) .
10. Método de funcionamiento de un dispositivo de tracción de acuerdo con una de las reivindicaciones anteriores, comprendiendo el método que las siguientes etapas se realicen por lo menos una vez:
- aproximación de dichos elementos de soporte, -alejamiento de dichos elementos de soporte.
11. Método de acuerdo con la reivindicación 10, en el que dicho coeficiente de rozamiento varía a lo largo del tiempo, comprendiendo dicho método que las siguientes etapas se realicen por lo menos una vez:
-disminución del coeficiente de rozamiento de dicho primer elemento de soporte (1, 1’, 1”) ,
- alejamiento de dicho primer elemento de soporte con respecto a dicho segundo elemento de soporte, -aumento del coeficiente de rozamiento de dicho primer elemento de soporte, -disminución del coeficiente de rozamiento de dicho segundo elemento de soporte (2, 2’, 2”) , -aproximación de dicho segundo elemento de soporte a dicho primer elemento de soporte.
12. Dispositivo de acuerdo con la reivindicación 10, en el que dicho coeficiente de rozamiento es anisótropo de acuerdo con un sentido de dicha dirección de movimiento.
Patentes similares o relacionadas:
Sistema robótico y métodos para tareas de mantenimiento en farolas y estructuras verticales de forma cónica, del 11 de Mayo de 2020, de FCC INDUSTRIAL E INFRAESTRUCTURAS ENERGETICAS, S.A.U: Un sistema robótico destinado a realizar de manera autónoma las tareas de mantenimiento de farolas o estructuras verticales con forma cónica o similar, como por ejemplo el pintado […]
Sistema de desplazamiento para superficies cilíndricas y/o cónicas, del 17 de Julio de 2019, de Fachhochschule Aachen: Sistema de desplazamiento para superficies cilíndricas y/o cónicas, en particular para la superficie exterior o la superficie interior de un conducto o poste […]
Cabezal limpiador para limpiar una superficie, dispositivo que comprende dicho cabezal limpiador y método de limpieza, del 20 de Febrero de 2019, de Fleet Cleaner Holding B.V: Cabezal limpiador para limpiar una superficie, tal como el casco de un barco, comprendiendo el cabezal limpiador: - un bastidor que comprende un eje […]
Robot escalador para mástiles, del 7 de Marzo de 2018, de Fachhochschule Aachen: Robot escalador para mástiles/torres , en particular para aerogeneradores, que comprende al menos un primer dispositivo de soporte y al […]
Dispositivo para salvar un obstáculo durante el desplazamiento, del 1 de Febrero de 2017, de VORWERK & CO. INTERHOLDING GMBH: Aparato de limpieza de suelos de desplazamiento automático con un dispositivo para salvar un obstáculo durante el desplazamiento, presentando el […]
Máquina-útil que comprende un carril longitudinal y un brazo transversal, del 24 de Agosto de 2016, de AIRBUS OPERATIONS: Máquina-útil para la realización de operaciones sobre una pieza que comprende: * un carril longitudinal configurado para ser posicionado frente a la pieza, […]
Robot magnético móvil con hueco de aire, del 18 de Febrero de 2015, de Chariot Robotics, LLC: Un robot magnético móvil para decapar revestimientos desde una pieza de trabajo ferro-magnética que comprende un chasis, en el que dicho chasis […]
Instalación para el montaje de piezas de carrocería, del 16 de Octubre de 2013, de ThyssenKrupp System Engineering GmbH: Instalación para el montaje de una carrocería de vehículo, que comprende: - una estación de mecanización para el montaje y/o mecanización de piezas de la carrocería, a […]