UNIDAD DE DESPLAZAMIENTO TIPO ORUGA.
Una unidad de desplazamiento tipo oruga que comprende: una caja del eje trasero (34) de un cuerpo de la máquina de desplazamiento (30);
un tren de rodaje de la oruga (2) oscilante soportado por la caja del eje trasero (34) a través de un árbol de balanceo (8); una rueda de tracción delantera (3) dispuesta en una parte extrema delantera del tren de rodaje de la oruga (2); una rueda de tracción trasera (4) dispuesta en una parte extrema trasera del tren de rodaje de la oruga (2); tres ruedas de marcha en vacío (5) alineadas entre la rueda de tracción delantera (3) y la rueda de tracción trasera (4) a intervalos en una dirección longitudinal; un eje trasero (33) soportado por la caja del eje trasero (34); una rueda motriz (6) que se dispone hacia arriba desde una porción intermedia longitudinal del tren de rodaje de la oruga (2) y que se configura para recibir una potencia transmitida del eje trasero (33); y un correa de oruga (7) envuelta alrededor de la rueda motriz (6), la rueda de tracción delantera (3), la rueda de tracción trasera (4) y las ruedas de marcha en vacío (5), caracterizada porque una distancia horizontal (L1) durante el contacto con el suelo entre un centro del árbol de balanceo (8) y un centro de un eje (3A) de la rueda de tracción delantera (3) se configura para ser mayor que una distancia horizontal (L2) entre el centro del árbol de balanceo (8) y un centro de un eje (4A) de la rueda de tracción trasera (4), y el árbol de balanceo (8) se dispone por debajo y hacia el frente de un centro de la rueda motriz (6), cada una de las dos ruedas de marcha en vacío (5) en un lado trasero de las tres ruedas de marcha en vacío (5) se hace pivotar en un primer brazo de balanceo (20), y una porción intermedia longitudinal del primer brazo de balanceo (20) se hace pivotar en el tren de rodaje de la oruga (2) a través de un primer eje de pivote (22), una distancia horizontal (S1) entre el centro del árbol de balanceo (8) y un centro del primer eje de pivote (22) se configura para ser menor que la distancia horizontal (S2) entre el centro del árbol de balanceo (8) y un eje de la rueda (5A) de la rueda de marcha en vacío (5) en el lado delantero, de modo que la carga se soporta por el tren de rodaje de la oruga (2), principalmente con dos ruedas de marcha en vacío (5) de las tres ruedas de marcha en vacío (5), y la rueda de marcha en vacío delantera (5) de las tres ruedas de marcha en vacío (5) tiene un eje de la rueda (5A) de la misma dispuesto hacia adelante del árbol de balanceo (8)
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/JP2007/061436.
Solicitante: KUBOTA CORPORATION.
Nacionalidad solicitante: Japón.
Dirección: 2-47, SHIKITSUHIGASHI 1-CHOME, NANIWA-KU OSAKA-SHI, OSAKA 556-8601 JAPON.
Inventor/es: INAOKA,MOTONARI.
Fecha de Publicación: .
Fecha Solicitud PCT: 6 de Junio de 2007.
Clasificación Internacional de Patentes:
- B62D49/06D3
- B62D55/084 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B62 VEHICULOS TERRESTRES QUE SE DESPLAZAN DE OTRO MODO QUE POR RAILES. › B62D VEHICULOS DE MOTOR; REMOLQUES (dirección o guiado de máquinas o instrumentos agrícolas según un recorrido determinado A01B 69/00; ruedas, ruedecillas pivotantes, mejora de la adherencia de ruedas B60B; neumáticos para vehículos, inflado de neumáticos, cambio o reparación de neumáticos B60C; conexiones entre vehículos de un mismo tren o de un conjunto similar B60D; vehículos raíl-carretera, vehículos anfibios o transformables B60F; disposiciones de suspensión B60G; calefacción, refrigeración, ventilación u otros dispositivos de tratamiento del aire B60H; ventanas, parabrisas, techos descapotables, puertas o dispositivos similares, cubiertas de protección para vehículos fuera de servicio B60J; disposiciones de conjuntos de propulsión, accionamientos auxiliares, transmisiones, disposición de instrumentos o tableros de a bordo B60K; equipo eléctrico o propulsión de vehículos de tracción eléctrica B60L; alimentación de energía eléctrica para vehículos de tracción eléctrica B60M; disposiciones para pasajeros no previstas en otro lugar B60N; vehículos adaptados al transporte de cargas o para llevar cargas u objetos especiales B60P; adaptación de los dispositivos de señalización o de iluminación, su montaje o soporte, circuitos a este efecto, para vehículos en general B60Q; vehículos, equipos o partes de vehículos, no previstos en otro lugar B60R; servicio,limpieza, reparación, elevación o maniobra, no previstos en otro lugar B60S; frenos, sistemas de control de frenos o partes de estos sistemas B60T; vehículos de colchón de aire B60V; ciclos de motor, sus accesorios B62J, B62K; ensayo de vehículos G01M). › B62D 55/00 Vehículos de orugas (bajo el aspecto de la dirección B62D 11/00). › Sistemas de orugas o carros de rodadura montados en vehículos, de forma separable, regulable o extensible, p. ej. sistemas de orugas portátiles (B62D 55/07 tiene prioridad).
- B62D55/14 B62D 55/00 […] › Disposición, emplazamiento o adaptación de rodillos.
- B62D55/15 B62D 55/00 […] › Dispositivos de montaje, p. ej. casquillos, ejes, rodillos, juntas.
- B62D55/30 B62D 55/00 […] › Medios de tensión de la oruga.
Clasificación PCT:
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia.
PDF original: ES-2373581_T3.pdf
Fragmento de la descripción:
Unidad de desplazamiento tipo oruga
Campo técnico
La presente invención se refiere a una unidad de desplazamiento tipo oruga que se puede montar en una parte trasera de un tractor o similar.
Técnica antecedente Como una unidad de desplazamiento tipo oruga, se pueden mencionar aquellas usadas en un tractor de semi-oruga, en el que la unidad se instala como un bandaje de rueda trasera del tractor, o que se puede reemplazar por un bandaje de rueda trasera.
En la técnica anterior de la unidad de desplazamiento tipo oruga de este tipo, por ejemplo, como se ha descrito en el documento de patente 1, una rueda de tracción delantera para ajustar la tensión, una rueda motriz que gira libremente y ruedas de marcha en vacío entre las mismas se alinean en una dirección delantera-trasera y se soportan por un tren de rodaje de la oruga; una rueda motriz se dispone hacia arriba de las ruedas de marcha en vacío; una oruga se envuelve alrededor de todas estas ruedas; un mecanismo de ajuste de tensión para soportar la rueda de tracción delantera y desviar la misma en una dirección que ajusta la tensión se inclina hacia abajo desde el tren de rodaje de la oruga hasta la rueda de tracción delantera; el tren de rodaje de la oruga se hace para que pueda pivotar sobre un eje que está en paralelo con un eje de la rueda motriz y se coloca por debajo del eje; un medio de regulación del intervalo de pivote para establecer un intervalo de pivote del tren de rodaje de la oruga se dispone a un lado de la rueda motriz en relación con el eje de pivote; la rueda de tracción delantera, la rueda motriz y ruedas de marcha en vacío se soportan en los respectivos ejes de soporte en voladizo hacia el exterior del tren de rodaje de la oruga; y al menos el eje de soporte de la rueda de marcha en vacío se inclina hacia fuera y hacia abajo.
Tres ruedas de marcha en vacío dispuestas en una dirección delantera-trasera se soportan por separado en el tren de rodaje de la oruga a través de los respectivos ejes de las ruedas.
Documento de patente 1: patente japonesa JP3560893B.
Divulgación de la invención Problema a resolverse por la invención En la técnica anterior antes mencionada, cuando un tractor se desplaza en un terreno plano, las tres ruedas de marcha en vacío dispuestas en la dirección delantera-trasera soportan juntas una carga, entrando en contacto con el suelo al mismo tiempo a través de la oruga. Sin embargo, cuando las ruedas de marcha en vacío delantera y trasera se desplazan sobre obstáculos, tales como piedras, una rueda de marcha en vacío intermedia se puede elevar y no puede soportar la carga, es decir, toda la carga se soporta únicamente por las dos ruedas de marcha en vacío (delantera y trasera) .
Especialmente, en el caso en que una carga esté en una parte trasera del tren de rodaje de la oruga, cuando la rueda de marcha en vacío delantera se desplaza sobre en un obstáculo, tal como una piedra, una carga sobre la rueda de marcha en vacío más trasera se vuelve excesiva, lo que conlleva a una mayor vibración vertical del tren de rodaje de la oruga.
El documento EP 1514775 describe un vehículo de trabajo del timo semi-oruga que comprende una carrocería, una ruda de control de dirección delantera dispuesta en un lado delantero de la carrocería, un eje de transmisión y un eje de pivote dispuestos en un lado trasero de la carrocería del vehículo, y una unidad de semioruga impulsada por el eje de transmisión. El vehículo de trabajo del tipo semioruga comprende: un tren de rodaje de la oruga por el que se soporta la unidad de semioruga por medio del eje de pivote con el fin de poder pivotar en relación con la carrocería del vehículo; una rueda motriz dispuesta en el eje de transmisión; una rueda de tracción delantera y una rueda de tracción trasera que se soportan en el tren de rodaje de la oruga de tal manera que una distancia horizontal desde la rueda motriz hasta la rueda de tracción delantera es mayor que una distancia horizontal desde la rueda motriz hasta la rueda de tracción trasera; y una correa de oruga (15) que se envuelve alrededor de la rueda motriz, la rueda de tracción delantera, y la rueda de tracción trasera. El eje de pivote se desplaza más allá de una línea vertical que pasa por un centro de la rueda motriz.
El documento WO 91/08941 describe un vehículo de oruga de tren suspendido que comprende un tren de contacto con el suelo sinfín, un piñón de transmisión que permanece fijo en relación con la carrocería del vehículo, una rueda loca trasera y rodillos en el suelo de contacto con el tren que se mueven con la oscilación de la suspensión de brazo trapezoidal/neumática, y una rueda loca compensadora montada para el movimiento sustancialmente lineal bajo la acción de una o más unidades de compresión de acción por muelles que actúan entre la rueda loca compensadora y la carrocería del vehículo.
El objeto de la presente invención es proporcionar una unidad de desplazamiento tipo oruga que resuelve los 2
problemas de la técnica anterior mencionados anteriormente.
Medios para resolver el problema De acuerdo con un primer aspecto de la presente invención, se proporciona una unidad de desplazamiento tipo oruga como se ha definido en la reivindicación 1.
De acuerdo con un segundo aspecto de la presente invención, se proporciona una unidad de desplazamiento tipo oruga como se ha definido en la reivindicación 2.
Las características preferidas de la presente invención se definen en las reivindicaciones dependientes.
La unidad de desplazamiento tipo oruga que tiene las configuraciones mencionadas anteriormente tiene los siguientes efectos.
Por ejemplo, cuando la rueda de marcha en vacío en el lado delantero se desplaza sobre un obstáculo M, tal como una piedra, dos ruedas de marcha en vacío en el lado trasero que pivotan cada una en el primer brazo de balanceo se ponen en contacto con el suelo al mismo tiempo, debido a la oscilación del brazo de balanceo, y por lo tanto, la carga en la parte posterior del tren de rodaje de la oruga se comparte por las dos ruedas de marcha en vacío en el lado trasero, y la carga en la rueda de marcha en vacío en el lado delantero se puede reducir también.
Además, cuando la rueda de marcha en vacío en el lado delantero de las dos ruedas de marcha en vacío traseras se desplaza sobre un obstáculo, la rueda de marcha en vacío más trasera se baja debido a la oscilación similar a un balancín del brazo de balanceo, que suprime la elevación del eje de pivote del brazo de balanceo, y suprime después la vibración en el tren de rodaje de la oruga.
Efecto de la invención Con la presente invención, cuando la rueda de marcha en vacío en el lado delantero se desplaza sobre un obstáculo, tal como una piedra, las dos ruedas de marcha en vacío en el lado trasero se ponen en contacto con el suelo al mismo tiempo, debido a la oscilación del brazo de balanceo, y por lo tanto, la carga se comparte por las dos ruedas de marcha en vacío en el lado trasero. La carga en la rueda de marcha en vacío en el lado delantero, además de la carga de la rueda de marcha en vacío en el lado trasero, se pueden reducir también y se puede reducir la vibración vertical del tren de rodaje de la oruga.
Mejor forma de realizar la invención Las realizaciones de la presente invención se describirán a continuación con referencia a los dibujos. Se desvelarán diversas realizaciones, y una combinación de una característica de una realización con una característica de la otra realización también se abarca en la presente invención.
Ejemplo 1
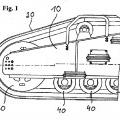
Las Figuras 1 a 5 y 7 ilustran una primera realización. En la Figura 7, se muestra un tractor T entero. El tractor T con una unidad de desplazamiento tipo oruga 1 tiene un cuerpo de máquina de desplazamiento 30. El cuerpo de máquina de desplazamiento 30 incluye un motor E, una caja de transmisión 31, un bastidor del eje delantero (no mostrado) y similares. El tractor T tiene una rueda delantera como una rueda de control de dirección que se puede accionar por potencia, unida al bastidor del eje delantero. El motor se cubre con capó y una parte de la operación y el asiento del conductor se mantienen en una cabina o ROPS. En una parte trasera del cuerpo de la máquina de desplazamiento 30, una máquina de trabajo trasero (aplicación) , tal como un cultivador giratorio, se remolca o soporta a través de un dispositivo de presión hidráulica y de un mecanismo de brazo de tres... [Seguir leyendo]
Reivindicaciones:
1. Una unidad de desplazamiento tipo oruga que comprende:
una caja del eje trasero (34) de un cuerpo de la máquina de desplazamiento (30) ; un tren de rodaje de la oruga (2) oscilante soportado por la caja del eje trasero (34) a través de un árbol de balanceo (8) ; una rueda de tracción delantera (3) dispuesta en una parte extrema delantera del tren de rodaje de la oruga (2) ; una rueda de tracción trasera (4) dispuesta en una parte extrema trasera del tren de rodaje de la oruga (2) ; tres ruedas de marcha en vacío (5) alineadas entre la rueda de tracción delantera (3) y la rueda de tracción trasera (4) a intervalos en una dirección longitudinal; un eje trasero (33) soportado por la caja del eje trasero (34) ; una rueda motriz (6) que se dispone hacia arriba desde una porción intermedia longitudinal del tren de rodaje de la oruga (2) y que se configura para recibir una potencia transmitida del eje trasero (33) ; y un correa de oruga (7) envuelta alrededor de la rueda motriz (6) , la rueda de tracción delantera (3) , la rueda de tracción trasera (4) y las ruedas de marcha en vacío (5) , caracterizada porque una distancia horizontal (L1) durante el contacto con el suelo entre un centro del árbol de balanceo (8) y un centro de un eje (3A) de la rueda de tracción delantera (3) se configura para ser mayor que una distancia horizontal (L2) entre el centro del árbol de balanceo (8) y un centro de un eje (4A) de la rueda de tracción trasera (4) , y el árbol de balanceo (8) se dispone por debajo y hacia el frente de un centro de la rueda motriz (6) , cada una de las dos ruedas de marcha en vacío (5) en un lado trasero de las tres ruedas de marcha en vacío (5) se hace pivotar en un primer brazo de balanceo (20) , y una porción intermedia longitudinal del primer brazo de balanceo (20) se hace pivotar en el tren de rodaje de la oruga (2) a través de un primer eje de pivote (22) , una distancia horizontal (S1) entre el centro del árbol de balanceo (8) y un centro del primer eje de pivote (22) se configura para ser menor que la distancia horizontal (S2) entre el centro del árbol de balanceo (8) y un eje de la rueda (5A) de la rueda de marcha en vacío (5) en el lado delantero, de modo que la carga se soporta por el tren de rodaje de la oruga (2) , principalmente con dos ruedas de marcha en vacío (5) de las tres ruedas de marcha en vacío (5) , y la rueda de marcha en vacío delantera (5) de las tres ruedas de marcha en vacío (5) tiene un eje de la rueda (5A) de la misma dispuesto hacia adelante del árbol de balanceo (8) .
2. La unidad de desplazamiento tipo oruga que comprende:
una caja del eje trasero (34) de un cuerpo de la máquina de desplazamiento (30) ; un tren de rodaje de la oruga (2) oscilante soportado por la caja del eje trasero (34) a través de un árbol de balanceo (8) ; una rueda de tracción delantera (3) dispuesta en una parte extrema delantera del tren de rodaje de la oruga (2) ; una rueda de tracción trasera (4) dispuesta en una parte extrema trasera del tren de rodaje de la oruga (2) ; cuatro ruedas de marcha en vacío (5) alineadas entre la rueda de tracción delantera (3) y la rueda de tracción trasera (4) a intervalos en una dirección longitudinal; un eje trasero (33) soportado por la caja del eje trasero (34) ; una rueda motriz (6) que se dispone hacia arriba desde una porción intermedia longitudinal del tren de rodaje de la oruga (2) y que se configura para recibir una potencia transmitida del eje trasero (33) ; y un correa de oruga (7) envuelta alrededor de la rueda motriz (6) , la rueda de tracción delantera (3) , la rueda de tracción trasera (4) y las ruedas de marcha en vacío (5) , caracterizada porque las cuatro ruedas de marcha en vacío (5) se componen de las dos ruedas de marcha en vacío (5) en el lado trasero y dos ruedas de marcha en vacío (5) en un lado delantero en relación con las dos ruedas de marcha en vacío (5) en el lado trasero, cada una de las dos ruedas de marcha en vacío (5) en un lado trasero de las cuatro ruedas de marcha en vacío (5) se hace pivotar en un primer brazo de balanceo (20) , y una porción intermedia longitudinal del primer brazo de balanceo (20) se hace pivotar en el tren de rodaje de la oruga (2) a través de un primer eje de pivote (22) , cada una de las dos ruedas de marcha en vacío (5) en el lado delantero se hace pivotar en un segundo brazo de balanceo (20) , y una porción intermedia longitudinal del segundo brazo de balanceo (20) se hace pivotar en el tren de rodaje de la oruga (2) a través de un segundo eje de pivote (22F) , una distancia horizontal (L1) durante el contacto con el suelo entre un centro del árbol de balanceo (8) y un centro de un eje (3A) de la rueda de tracción delantera (3) se configura para ser mayor que la distancia horizontal (L2) entre el centro del árbol de balanceo (8) y un centro de un eje (4A) de la rueda de tracción trasera (4) , y el árbol de balanceo (8) se dispone por debajo de un centro de la rueda motriz (6) , para proporcionar una fuerza hacia arriba a una parte delantera de la unidad de desplazamiento cuando se aplique tensión a la correa de oruga (7) , y una distancia horizontal (S1) entre el centro del árbol de balanceo (8) y un centro del primer eje de pivote (22R) se configura para ser menor que la distancia horizontal (S3) entre el centro del árbol de balanceo (8) y un centro del segundo eje de pivote (22F) .
3. La unidad de desplazamiento tipo oruga de acuerdo con la reivindicación 1 o reivindicación 2, en la que cada una de la rueda de tracción delantera (3) y rueda de tracción trasera (4) tiene un diámetro mayor que un diámetro de cada una de las ruedas de marcha en vacío (5) , y el primer eje de pivote (22, 22R) del primer brazo de balanceo (20) tiene una altura que es sustancialmente la misma que la altura de un eje de la rueda (5A) de cada una de las ruedas de marcha en vacío (5) en el lado trasero, y se dispone en el centro entre los ejes de la rueda (5A) .
4. La unidad de desplazamiento tipo oruga de acuerdo con la reivindicación 2, en la que cada una de la rueda de tracción delantera (3) y rueda de tracción trasera (4) tiene un diámetro mayor que un diámetro de cada una de las ruedas de marcha en vacío (5) , y el segundo eje de pivote (22F) del segundo brazo de balanceo (20) tiene una altura que es sustancialmente la misma que la altura de un eje de la rueda (5A) de cada una de las ruedas de marcha en vacío (5) en el lado delantero, y se dispone en el centro entre los ejes de la rueda (5A) .
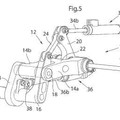
5. La unidad de desplazamiento tipo oruga de acuerdo con la reivindicación 1 o reivindicación 2, en la que un mecanismo de ajuste de tensión (9) configurado para soportar la rueda de tracción delantera (3) y para desviar la rueda de tracción delantera (3) en una dirección que ajusta la tensión, se proporciona en una porción delantera del tren de rodaje de la oruga (2) , comprendiendo el mecanismo de ajuste de tensión (9) : un soporte del eje (10) configurado para soportar un eje (3A) de la rueda de tracción delantera (3) desde ambos lados del eje (3A) ; y un par de muelles de tensión derecho e izquierdo (12) configurados para desviar hacia delante el soporte del eje (10) .
Patentes similares o relacionadas:
Rueda guía para un tren de rodaje de máquina, del 6 de Noviembre de 2019, de CATERPILLAR INC.: Una rueda guía para un tren de rodaje de una máquina, que comprende: un eje ; y un cuerpo separado que se extiende radialmente […]
Dispositivo de oruga, del 9 de Enero de 2019, de Tas Global Co., Ltd: Un dispositivo de oruga que comprende: una parte de eliminación de película de agua que se proporciona en un miembro (C) de transmisión de potencia que incluye […]
Sistema de tensado de cadenas en un tractor oruga, del 8 de Abril de 2016, de IMPOSITA METAL, S.L.L: Sistema de tensado de cadenas en un tractor oruga, que comprende una rueda delantera de tensado, una rueda trasera de reenvío, una cadena, unas ruedas […]
 Mecanismo activador de cadena y máquina de trabajo, del 17 de Noviembre de 2015, de LIEBHERR-WERK NENZING GMBH: Mecanismo activador de cadena para una máquina de trabajo, en particular para una grúa sobre orugas o una excavadora sobre orugas, con una cadena […]
Mecanismo activador de cadena y máquina de trabajo, del 17 de Noviembre de 2015, de LIEBHERR-WERK NENZING GMBH: Mecanismo activador de cadena para una máquina de trabajo, en particular para una grúa sobre orugas o una excavadora sobre orugas, con una cadena […]
 Disposición para controlar un volante tensor de la banda de rodamiento de un vehículo oruga, del 29 de Mayo de 2013, de BAE SYSTEMS HAGGLUNDS AKTIEBOLAG: Disposición para controlar un volante tensor de la banda de rodamiento de un vehículo sobre orugas, que comprende un sistema de brazos de guía, […]
Disposición para controlar un volante tensor de la banda de rodamiento de un vehículo oruga, del 29 de Mayo de 2013, de BAE SYSTEMS HAGGLUNDS AKTIEBOLAG: Disposición para controlar un volante tensor de la banda de rodamiento de un vehículo sobre orugas, que comprende un sistema de brazos de guía, […]
 PROCEDIMIENTO PARA LA MEDICION DE LA COMBA DE LA CADENA EN UN VEHICULO DE CADENAS, del 11 de Febrero de 2010, de KRAUSS-MAFFEI WEGMANN GMBH & CO. KG: Procedimiento para la medición de la comba de la cadena en un vehículo de cadenas, en el que se compara la comba de la cadena sobre una sección longitudinal predeterminada […]
PROCEDIMIENTO PARA LA MEDICION DE LA COMBA DE LA CADENA EN UN VEHICULO DE CADENAS, del 11 de Febrero de 2010, de KRAUSS-MAFFEI WEGMANN GMBH & CO. KG: Procedimiento para la medición de la comba de la cadena en un vehículo de cadenas, en el que se compara la comba de la cadena sobre una sección longitudinal predeterminada […]
DISPOSITIVO PARA MANIOBRAR UNA RUEDA TENSORA DE UN VEHICULO ORUGA., del 1 de Mayo de 2007, de ALVIS HAGGLUNDS AB: Vehículo oruga, en el cual una rueda tensora está montada rotativamente en un extremo libre de un brazo basculante telescópico montado en el […]
DISPOSITIVO PARA OPERAR UN VOLANTE TENSOR DE LA BANDA DE RODAMIENTO, del 2 de Agosto de 2011, de BAE SYSTEMS HAGGLUNDS AKTIEBOLAG: Un dispositivo para operar un volante tensor de la banda de rodamiento en un vehículo oruga, que comprende un brazo del volante tensor que tiene un eje de rotación […]