PROCEDIMIENTO DE ACOPLAMIENTO Y DESACOPLAMIENTO AUTOMÁTICO PARA UNA TOMA DE FUERZA DEPENDIENTE DEL ACOPLAMIENTO COLOCADA EN LA CAJA DE ENGRANAJES DEL VEHÍCULO.
Un procedimiento de acoplamiento automático para una toma de fuerza dependiente del acoplamiento (32),
toma de fuerza (32) la cual es accionada por un motor (1), colocado en un vehículo, a través de un embrague de discos automático (3) el cual a su vez está conectado a una caja de engranajes de desmultiplicación por etapas automática (9) en la cual está colocado un árbol (11) para el accionamiento de la toma de fuerza (32), por lo menos un conjunto de control (45) para controlar la caja de engranajes (9), el embrague de discos (3) y el motor (1), el procedimiento de acoplamiento estando caracterizado por las etapas de: - el conjunto de control (45) registra a través del control (33), conectado al conjunto de control (45) para controlar la toma de fuerza (32), que se requiere el acoplamiento de la toma de fuerza (32); - el conjunto de control (45) registra que la velocidad del vehículo es cero o virtualmente cero; - el conjunto de control (45) controla la velocidad de giro del motor (1) hasta la velocidad en vacío o la velocidad virtualmente en vacío; - el conjunto de control (45) desacopla el embrague de discos (3); - el conjunto de control (45) acopla la toma de fuerza (32); - el conjunto de control (45) conecta el embrague de discos (3) juntos
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/SE2003/001387.
Solicitante: VOLVO LASTVAGNAR AB.
Nacionalidad solicitante: Suecia.
Dirección: 405 08 GÖTEBORG SUECIA.
Inventor/es: ERIKSSON, ANDERS, STEEN, MARCUS, BRATHE,LARS.
Fecha de Publicación: .
Fecha Solicitud PCT: 8 de Septiembre de 2003.
Clasificación Internacional de Patentes:
- B60K17/28 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B60 VEHICULOS EN GENERAL. › B60K DISPOSICIONES O MONTAJE DE CONJUNTOS DE PROPULSION O DE TRANSMISIONES SOBRE VEHICULOS; DISPOSICIONES O MONTAJE DE VARIOS MOTORES PRINCIPALES DIFERENTES EN VEHÍCULOS; ACCIONAMIENTOS AUXILIARES PARA VEHICULOS; INSTRUMENTACION O TABLEROS DE A BORDO DE VEHICULOS; DISPOSICIONES DE CONJUNTOS DE PROPULSION SOBRE VEHICULOS, RELATIVAS A LA REFRIGERACION, A LA ADMISION DE AIRE, AL ESCAPE DE GASES O A LA ALIMENTACION DE CARBURANTE. › B60K 17/00 Disposiciones o montaje de las transmisiones en los vehículos (ejes que transmiten el par B60B 35/12; transmisiones y mecanismos de dirección combinados para dirigir las ruedas no orientables B62D 11/00; embragues en sí , p. ej. su construcción, F16D; engranajes en sí , p. ej. su construcción, F16H). › caracterizadas por la disposición, el emplazamiento o el tipo de toma de fuerza.
- B60W10/02 B60 […] › B60W CONTROL CONJUGADO DE VARIAS SUBUNIDADES DE UN VEHICULO DE DIFERENTE TIPO O FUNCION; SISTEMAS DE CONTROL ESPECIALMENTE ADAPTADOS PARA VEHICULOS HIBRIDOS; SISTEMAS DE CONTROL DE LA CONDUCCION DE VEHICULOS TERRESTRES NO RELACIONADOS CON EL CONTROL DE UNA SUBUNIDAD PARTICULAR. › B60W 10/00 Control conjugado de subunidades de vehículo de diferentes tipos o funciones (para propulsión de vehículos de tracción exclusivamente eléctrica con una fuente de energía interior al vehículo B60L 50/00 - B60L 58/00). › incluyendo el control de los acoplamientos de la cadena cinemática.
- B60W10/06 B60W 10/00 […] › incluyendo el control de motores de combustión.
- B60W30/18M
Clasificación PCT:
- B60K17/28 B60K 17/00 […] › caracterizadas por la disposición, el emplazamiento o el tipo de toma de fuerza.
- F16H63/40 MECANICA; ILUMINACION; CALEFACCION; ARMAMENTO; VOLADURA. › F16 ELEMENTOS O CONJUNTOS DE TECNOLOGIA; MEDIDAS GENERALES PARA ASEGURAR EL BUEN FUNCIONAMIENTO DE LAS MAQUINAS O INSTALACIONES; AISLAMIENTO TERMICO EN GENERAL. › F16H TRANSMISIONES. › F16H 63/00 Salidas de control de transmisiones que transmiten un movimiento rotativo para cambios de velocidad o para mecanismos de inversión. › incluyendo otras señales distintas de las señales para maniobrar los mecanismos finales de salida.
Clasificación antigua:
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
PDF original: ES-2360517_T3.pdf
Fragmento de la descripción:
**(Ver fórmula)**
CAMPO TÉCNICO DE LA INVENCIÓN
La presente invención se refiere a un procedimiento para vehículos a motor según el preámbulo de las reivindicaciones 1 y 6 de la patente más adelante en este documento. El procedimiento se refiere a un procedimiento de acoplamiento y desacoplamiento automático para una toma de fuerza dependiente del acoplamiento colocada en la caja de engranajes del vehículo.
ESTADO DE LA TÉCNICA
A fin de que sea posible manejar la carga en un camión eficazmente, es necesario equipo de manipulación de la carga. Los ejemplos más comunes de un equipo de este tipo son mecanismos basculantes y grúas. También son comunes los cargadores de gancho, los conjuntos de manipulación de desechos, los mezcladores giratorios de cemento, los conjuntos de descarga de agua y los compresores de aire para cargar o descargar carga a granel.
A fin de utilizar la potencia de accionamiento del motor del vehículo para accionar también el equipo de manipulación de la carga, se requiere una toma de fuerza. La potencia de accionamiento para la toma de fuerza puede ser transmitida tanto mecánicamente a través de un árbol de transmisión como a través de correas o hidráulicamente debido a que esté montada una bomba hidráulica en la toma de fuerza.
Las tomas de fuerza están divididas en tomas de fuerza independientes del acoplamiento y dependientes del acoplamiento. Las tomas de fuerza dependientes del acoplamiento están montadas en la caja de engranajes y generalmente están accionadas por el árbol intermedio de la caja de engranajes. Esto significa que la toma de fuerza depende del acoplamiento, es decir la toma de fuerza se detiene cuando el embrague de discos entre el motor y la caja de engranajes del vehículo se desacopla. Dependiendo de si la caja de engranajes está equipada o no con un engranaje de división, la relación entre el motor y la toma de fuerza se puede ver influida. Las tomas de fuerza dependientes del acoplamiento son adecuadas para el equipo de manipulación de la carga el cual se utiliza cuando el vehículo está estacionado, por ejemplo mecanismos basculantes, grúas, cargadores de gancho, bombas para vaciar y rellenar desde diversos recipientes y compresores de aire para la carga y descarga de cargas a granel.
Las cajas de engranaje automáticas del tipo de caja de engranajes de desmultiplicación por etapas automáticas se han convertido en comunes de forma creciente en los vehículos pesados a medida que la tecnología de los microordenadores se ha desarrollado adicionalmente y ha hecho posible, con un ordenador de control y una serie de accionamientos, por ejemplo servomotores, regular con precisión la velocidad del motor, el acoplamiento y el desacoplamiento de un embrague de discos automático entre el motor y la caja de engranajes y también medios acoplamiento interiores de la caja de engranajes de tal modo y uno con relación al otro de modo que siempre se obtiene un cambio de velocidades suave a la velocidad correcta del motor.
El documento DE 10059708 revela un ejemplo de una caja de engranajes de desmultiplicación por etapas automática según la técnica anterior.
La presente invención tiene por objetivo resolver el problema de cómo simplificar las operaciones para el conductor de un vehículo cuando desea utilizar una toma de fuerza dependiente del acoplamiento, colocada en una caja de engranajes de desmultiplicación por etapas automática.
RESUMEN DE LA INVENCIÓN
La solución del problema según la invención en tanto en cuanto concierne al procedimiento según la invención se describe en las reivindicaciones 1 y 6 de la patente. Las otras reivindicaciones de la patente describen formas de realización preferidas y desarrollos el procedimiento según la invención (2 a 5 y 7 y 8).
El procedimiento según la invención describe un procedimiento de acoplamiento automático y un procedimiento de desacoplamiento automático para una toma de fuerza dependiente del acoplamiento la cual es accionada por un motor, colocado en un vehículo, a través de un embrague de discos automático el cual a su vez está conectado a una caja de engranajes de desmultiplicación por etapas automática en la cual está colocado un árbol para el accionamiento de la toma de fuerza. Por lo menos un conjunto de control para controlar la caja de engranajes, el embrague de discos y el motor está colocado en el vehículo.
En el caso del procedimiento de acoplamiento, la invención está caracterizada por las etapas de:
- el conjunto de control registra a través del control, conectado al conjunto de control para controlar la toma de fuerza, que se requiere el acoplamiento de la toma de fuerza;
- el conjunto de control registra que la velocidad del vehículo es cero o virtualmente cero;
- el conjunto de control controla la velocidad de giro del motor hasta la velocidad en vacío o la velocidad virtualmente en vacío;
- el conjunto de control desacopla el embrague de discos;
- el conjunto de control acopla la toma de fuerza;
- el conjunto de control conecta el embrague de discos juntos.
**(Ver fórmula)**
En el caso del procedimiento de desacoplamiento, la invención está caracterizada por las etapas de:
- el conjunto de control registra a través del control, conectado al conjunto de control para controlar la toma de fuerza, que se requiere el desacoplamiento de la toma de fuerza;
- el conjunto de control controla la velocidad de giro del motor hasta la velocidad en vacío o la velocidad virtualmente en vacío;
- el conjunto de control desacopla el embrague de discos;
- el conjunto de control desacopla la toma de fuerza;
- el conjunto de control conecta el embrague de discos juntos.
La ventaja del procedimiento de acoplamiento y desacoplamiento según la invención es que es más fácil y en la mayor parte de los casos más rápido para el conductor acoplar y desacoplar la toma de fuerza. La toma de fuerza se acopla o desacopla con únicamente una manipulación.
En una primera forma de realización preferida del procedimiento según la invención, el conjunto de control está colocado de modo que, después de que ha sido realizado el acoplamiento de la toma de fuerza, adapta la velocidad de giro del motor teniendo en cuenta la toma de fuerza o teniendo en cuenta el equipo accionado por la toma de fuerza.
La ventaja de procedimiento según la invención es que, puesto que el sistema de control conoce por adelantado cual es el tipo de toma de fuerza o cual es el tipo de equipo que está conectado a la toma de fuerza, el procedimiento de acoplamiento y desacoplamiento se puede optimizar, por ejemplo en tanto en cuanto concierne a la velocidad de giro.
En una segunda forma de realización del procedimiento según la invención, el propio acoplamiento de la toma de fuerza se optimiza mediante, justo antes de que tenga lugar el acoplamiento de la toma de fuerza, el conjunto de control que asegura que la velocidad de giro de ese árbol de la caja de engranajes, el cual acciona la toma de fuerza, es reducida.
La ventaja de procedimiento según la invención es que el dispositivo de acoplamiento y desacoplamiento de la toma de fuerza está sometido a tensiones más pequeñas y de este modo se prolonga la vida del dispositivo.
Formas de realización adicionales de la invención se ponen de manifiesto a partir de las reivindicaciones subordinadas de la patente.
BREVE DESCRIPCIÓN DE LOS DIBUJOS
La presente invención se describirá con mayor detalle más adelante en este documento con referencia a los dibujos adjuntos los cuales, para el propósito de ejemplificación, representan formas de realización preferidas de la invención y también los antecedentes técnicos.
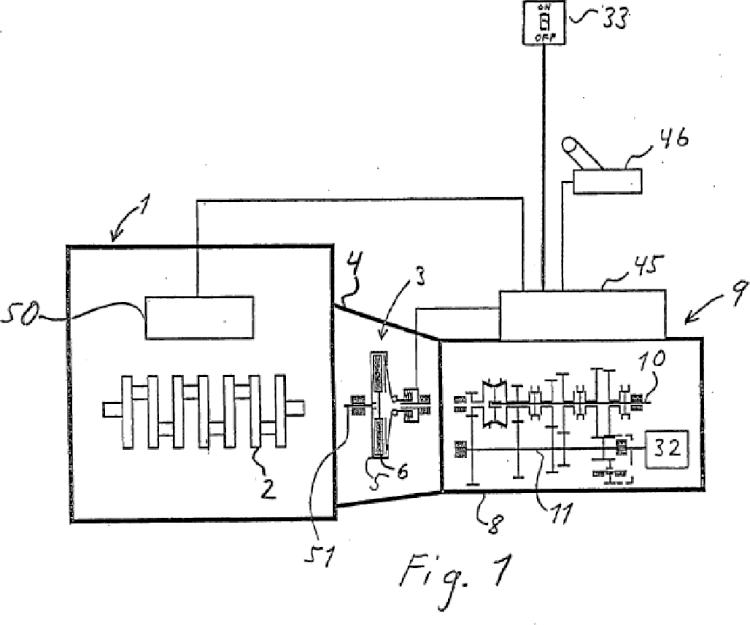
La figura 1 muestra una representación esquemática de un motor de combustión interna con el embrague y la caja de engranajes adyacentes.
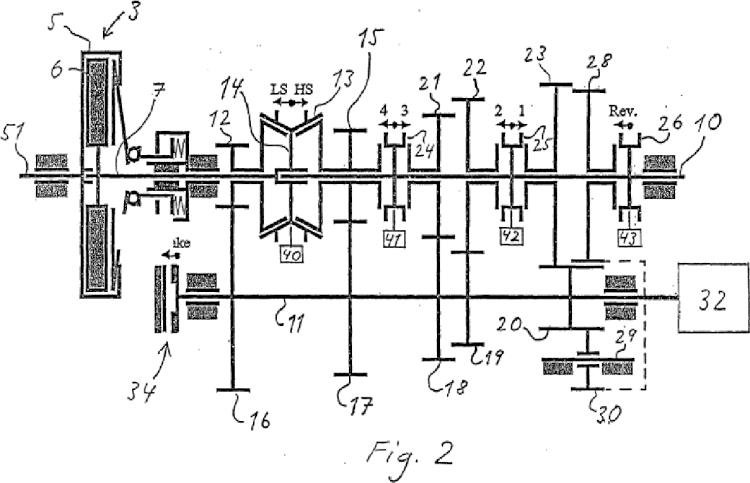
La figura 2 muestra el embrague y la caja de engranajes de la figura 1 a una escala mayor.
En la figura 1, el número de referencia 1 designa un motor de combustión interna de seis cilindros, por ejemplo un motor diesel, el cigüeñal 2 del cual está conectado a un embrague de disco seco de disco simple, designado globalmente mediante el número de referencia 3, el cual está encerrado en una caja de embrague 4. El cigüeñal 2, a través del árbol de salida 51 del motor, árbol el cual está conectado al volante de inercia (no representado), está... [Seguir leyendo]
Reivindicaciones:
1. Un procedimiento de acoplamiento automático para una toma de fuerza dependiente del acoplamiento (32), toma de fuerza (32) la cual es accionada por un motor (1), colocado en un vehículo, a través de un embrague de discos automático (3) el cual a su vez está conectado a una caja de engranajes de desmultiplicación por etapas automática (9) en la cual está colocado un árbol (11) para el accionamiento de la toma de fuerza (32), por lo menos un conjunto de control (45) para controlar la caja de engranajes (9), el embrague de discos (3) y el motor (1), el procedimiento de acoplamiento estando caracterizado por las etapas de:
- el conjunto de control (45) registra a través del control (33), conectado al conjunto de control (45) para controlar la toma de fuerza (32), que se requiere el acoplamiento de la toma de fuerza (32);
- el conjunto de control (45) registra que la velocidad del vehículo es cero o virtualmente cero;
- el conjunto de control (45) controla la velocidad de giro del motor (1) hasta la velocidad en vacío o la velocidad virtualmente en vacío;
- el conjunto de control (45) desacopla el embrague de discos (3);
- el conjunto de control (45) acopla la toma de fuerza (32);
- el conjunto de control (45) conecta el embrague de discos (3) juntos.
2. El procedimiento de acoplamiento automático para una toma de fuerza dependiente del acoplamiento (32) según la reivindicación 1 en el que el procedimiento está adicionalmente caracterizado por la etapa de que, después de que haya sido realizado el acoplamiento de la toma de fuerza (32) el conjunto de control (45) adapta la velocidad de giro del motor (1) teniendo en cuenta la toma de fuerza (32) o teniendo cuenta el equipo accionado por la toma de fuerza (32).
3. El procedimiento de acoplamiento automático para una toma de fuerza dependiente del acoplamiento (32) según cualquiera de las reivindicaciones anteriores en el que el procedimiento está adicionalmente caracterizado por la etapa de que, antes de que tenga lugar el acoplamiento de la toma de fuerza (32), el conjunto de control (45) asegura que la velocidad de giro de ese árbol (11) de la caja de engranajes (9), el cual acciona la toma de fuerza, es reducida.
4. El procedimiento de acoplamiento automático para una toma de fuerza dependiente del acoplamiento (32) según cualquiera de las reivindicaciones anteriores en el que el procedimiento está adicionalmente caracterizado por la etapa de que, cuando la caja de engranajes (9) está equipada con un engranaje de división (12, 16, 15, 17, 13, 14) el conjunto de control (45) asegura que, después del desacoplamiento del embrague de discos (3), se selecciona un engranaje de división teniendo en cuenta la toma de fuerza (32) o el equipo accionado por la toma de fuerza.
5. El procedimiento de acoplamiento automático para una toma de fuerza dependiente del acoplamiento (32) según cualquiera de las reivindicaciones anteriores en el que el procedimiento está adicionalmente caracterizado por la etapa de que el conjunto de control (45) asegura que el propio acoplamiento de la toma de fuerza (32) tiene lugar de una manera óptima ajustando la velocidad de giro o, en particular en el caso de un acoplamiento de dientes colocado entre el árbol (11) y la toma de fuerza (32), mediante la prevención de una situación en la que un diente de engranaje esté contra otro diente de engranaje en el acoplamiento de dientes.
6. Un procedimiento de desacoplamiento automático para una toma de fuerza dependiente del acoplamiento (32), toma de fuerza (32) la cual es accionada por un motor (1), colocado en un vehículo, a través de un embrague de discos automático (3) el cual a su vez está conectado a una caja de engranajes de desmultiplicación por etapas automática (9) en la cual está colocado un árbol (11) para el accionamiento de la toma de fuerza (32), por lo menos un conjunto de control (45) para controlar la caja de engranajes (9), el embrague de discos (3) y el motor (1), el procedimiento de desacoplamiento estando caracterizado por las etapas de:
- el conjunto de control (45) registra a través del control (33), conectado al conjunto de control (45) para controlar la toma de fuerza (32), que se requiere el desacoplamiento de la toma de fuerza (32);
- el conjunto de control (45) controla la velocidad de giro del motor (1) hasta la velocidad en vacío o la velocidad virtualmente en vacío;
- el conjunto de control (45) desacopla el embrague de discos (3);
- el conjunto de control (45) desacopla la toma de fuerza (32);
- el conjunto de control (45) conecta el embrague de discos (3) juntos.
7. El procedimiento de desacoplamiento automático para una toma de fuerza dependiente del acoplamiento (32) según la reivindicación 6 en el que el procedimiento está adicionalmente caracterizado por la etapa de que, antes de que tenga lugar el desacoplamiento de la toma de fuerza (32), el conjunto de control (45) asegura que la velocidad de giro de ese árbol (11) de la caja de engranajes (9), el cual acciona la toma de fuerza, es reducida.
8. El procedimiento de desacoplamiento automático para una toma de fuerza dependiente del acoplamiento (32)
**(Ver fórmula)**
según cualquiera de las reivindicaciones 6 o 7 en el que el procedimiento está adicionalmente caracterizado por la etapa de que, después de que haya tenido lugar el desacoplamiento de la toma de fuerza (32), el conjunto de control (45) controla la velocidad de giro del motor (1) hasta la velocidad en vacío o la velocidad virtualmente en vacío.
Patentes similares o relacionadas:
Línea motriz de un vehículo híbrido, en particular de un vehículo industrial o comercial, del 29 de Abril de 2020, de IVECO S.P.A.: Línea motriz de un vehículo híbrido, en particular de un vehículo industrial o comercial, comprendiendo la línea motriz: - una caja de engranajes (GR) que […]
Vehículo del tipo de montar a horcajadas equipado con un aparato de transmisión automática, del 8 de Abril de 2020, de YAMAHA HATSUDOKI KABUSHIKI KAISHA: Un vehículo del tipo de montar a horcajadas equipado con un aparato de transmisión automática , incluyendo: un operador de acelerador […]
 Procedimiento para manejar un sistema, sistema, control y producto de programa de ordenador, del 26 de Febrero de 2020, de ROBERT BOSCH GMBH: Procedimiento para manejar un sistema para un vehículo de motor, comprendiendo el sistema un control , una red de a bordo de alta tensión , una […]
Procedimiento para manejar un sistema, sistema, control y producto de programa de ordenador, del 26 de Febrero de 2020, de ROBERT BOSCH GMBH: Procedimiento para manejar un sistema para un vehículo de motor, comprendiendo el sistema un control , una red de a bordo de alta tensión , una […]
CONJUNTO PARA LIMITACION DE VELOCIDAD DE FORMA AUTOMÁTICA EN VEHÍCULOS, del 20 de Noviembre de 2019, de MARTINEZ BONET, Francisco Jose: 1. Conjunto para limitación de velocidad de forma automática en vehículos caracterizado porque comprende un asistente de velocidad encargado […]
Máquina de trabajo autopropulsada así como procedimiento para frenar una máquina de trabajo de este tipo, del 6 de Noviembre de 2019, de Liebherr-Components Biberach GmbH: Máquina de trabajo autopropulsada, en particular vehículo oruga tal como una niveladora, con un accionamiento eléctrico que comprende al menos un motor […]
Máquina de trabajo autopropulsada, así como procedimiento para frenar una máquina de trabajo de esa clase, del 6 de Noviembre de 2019, de Liebherr-Components Biberach GmbH: Máquina de trabajo autopropulsada, en particular un camión volquete o camión, con un accionamiento eléctrico que comprende al menos un motor […]
Aparato de control para un vehículo y método de control para un vehículo, del 19 de Junio de 2019, de TOYOTA JIDOSHA KABUSHIKI KAISHA: Un aparato de control para un vehículo , incluyendo el vehículo un motor de combustión , un primer motor eléctrico (MG1), un elemento rotativo […]
Aparato de transmisión automática y vehículo del tipo de montar a horcajadas equipado con el aparato, del 8 de Mayo de 2019, de YAMAHA HATSUDOKI KABUSHIKI KAISHA: Un vehículo del tipo de montar a horcajadas equipado con un aparato de transmisión automática , incluyendo: un embrague incluyendo un rotador de lado […]