DISPOSITIVO DE ACOPLAMIENTO PARA BRAZOS DE ROBOT.
Un dispositivo de acoplamiento para brazos de robot que incluye un elemento de fijación del lado del brazo (3) que está montado en un brazo de robot,
un elemento de fijación del lado de la herramiento (5) en el que se fijan herramientas, un medio de bloqueo que tiene un elemento de leva (17) que está montado en el elemento de fijación del lado del brazo (3) y tiene una pluralidad de ranuras inclinadas de bloqueo (17a) formadas alrededor de la línea del eje de la superficie circunferencial exterior del mismo, un elemento de actuación (9) que desplaza el elemento de leva (17) entre la posición de bloqueo y la posición de desbloqueo, un elemento soporte de bolas (11) que está dispuesto en el lado de la superficie circunferencial exterior del elemento de leva (17) y soporta de manera desplazable las bolas de bloqueo (13) correspondientemente dispuestas en las ranuras inclinadas de bloqueo (17a) en una dirección perpendicular a la dirección de desplazamiento del elemento de leva (17), un elemento receptor de bolas (23) que está montado en el elemento de fijación del lado de la herramienta (5) y tiene una pluralidad de ranuras inclinadas de encajamiento (23a) con las cuales son encajadas las bolas de bloqueo (13) que se deslizan en las ranuras inclinadas de bloqueo (17a) del elemento de leva (17) desplazado a la posición de bloqueo, en el que, cuando el elemento de leva (17) es desplazado de la posición de desbloqueo a la posición de bloqueo, las bolas de bloqueo (13) que se deslizan en las ranuras inclinadas de bloqueo (17a) para ser desplazadas al el exterior a lo largo de la dirección del radio son encajadas con las ranuras inclinadas de encajamiento (23a) a fin de acoplar mutuamente el elemento de fijación del lado del brazo (3) y el elemento de fijación del lado de la herramienta (5), caracterizado en que dicho dispositivo de acoplamiento para brazos de robot (1) comprende además bolas de desbloqueo (15) que están dispuestas entre las bolas de bloqueo (13) y apoyadas de manera desplazable por el elemento soporte de bolas (11) en una dirección perpendicular a la dirección de desplazamiento del elemento de leva (17); una pluralidad de ranuras inclinadas de empuje (17b) que están formadas en la superficie circunferencial exterior del elemento de leva (17) entre las ranuras inclinadas de bloqueo (17a), y se inclinan en una dirección opuesta a la dirección de inclinación de las ranuras inclinadas de bloqueo (17a); y una pluralidad de ranuras inclinadas de separación (23b) que están formadas en el elemento receptor de bolas (23) entre las ranuras inclinadas de encajamiento (23a), y se inclinan en una dirección opuesta a la dirección de inclinación de las ranuras inclinadas de encajamiento (23a), en el que, cuando el elemento de leva (17) es desplazado de la posición de bloqueo a la posición de desbloqueo, el encajamiento de las bolas de bloqueo (13) encajadas con las ranuras inclinadas de encajamiento (23a) puede ser liberado, y las bolas de desbloqueo (15) que se deslizan en las ranuras inclinadas de empuje (17b) para ser desplazadas al el exterior a lo largo de la dirección del radio se hacen deslizar sobre las ranuras inclinadas de separación (23b) a fin de hacer posible empujar y apartar el elemento de fijación del lado de la herramienta (5) del elemento de fijación del lado del brazo (3)
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E07112360.
Solicitante: STAR SEIKI CO., LTD.
Nacionalidad solicitante: Japón.
Dirección: 2-36 SHIMOSAKA-CHO, MIZUHO-KU NAGOYA-SHI, AICHI-KEN JAPON.
Inventor/es: Mizuno,Kouji.
Fecha de Publicación: .
Fecha Solicitud PCT: 12 de Julio de 2007.
Clasificación Internacional de Patentes:
- B23B31/107B
- B25J15/04 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › B25J 15/00 Cabezas de aprehensión. › con posibilidad para el levantamiento o el cambio a distancia de la cabeza o de partes de ésta.
Clasificación PCT:
- B23B31/107 B […] › B23 MAQUINAS-HERRAMIENTAS; TRABAJO DE METALES NO PREVISTO EN OTRO LUGAR. › B23B TORNEADO; TALADRADO (usando un electrodo en lugar de una herramienta B23H, p.ej. haciendo agujeros B23H 9/14; trabajando con un haz de laser B23K 26/00; dispositivos para copiar o controlar B23Q). › B23B 31/00 Mandriles de presión; Mandriles extensibles; Sus adaptaciones para el control a distancia (dispositivos destinados a fijarse sobre un mandril en general B23Q 3/12; fijación por fuerza magnética o eléctrica que actúa directamente sobre las piezas que van a ser trabajadas B23Q 3/152). › estando asegurada la retención mediante elementos de detención que actúan lateralmente, p. ej. pernos, tuercas, chavetas; estando asegurada la retención mediante elementos móviles, p. ej. bolas.
- B25J15/04 B25J 15/00 […] › con posibilidad para el levantamiento o el cambio a distancia de la cabeza o de partes de ésta.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
PDF original: ES-2359524_T3.pdf
Fragmento de la descripción:
ANTECEDENTES DE LA INVENCIÓN
1. Campo de la invención
Esta invención se refiere a un dispositivo de acoplamiento para brazos de robot que fija y separa varias herramientas a un brazo de robot de un robot poliarticulado, o fija y separa un mandril etc. a los brazos superiores e inferiores, un brazo giratorio de un dispositivo de recepción de artículos moldeados.
2. Descripción de la técnica relacionada
El documento DE 297 18 726 U1 revela un dispositivo de acoplamiento para brazos de robot según se describe en el preámbulo de la reivindicación 1.
La publicación abierta a inspección pública de la solicitud de patente japonesa N.° 4-63688 revela un dispositivo de acoplamiento capaz de fijar y separar una herramienta etc. a y de un brazo de robot. El dispositivo conocido incluye una placa principal (conjunto interior), la cual está fijada a un brazo de robot, una placa de herramienta (conjunto exterior) a la cual está fijada una herramienta etc., y un medio de bloqueo que acopla y bloquea estas placas.
El medio de bloqueo del dispositivo incluye un elemento de leva en forma de un disco que está apoyado de manera deslizable sobre la placa principal entre la posición de bloqueo y la posición de desbloqueo, una pluralidad de elementos de bola los cuales están dispuestos alrededor del elemento de leva, y están apoyados en forma deslizable en la placa principal en una dirección esencialmente perpendicular a la dirección de deslizamiento del elemento de leva, y un receptor de bola en forma de un anillo que está dispuesto en la placa de herramienta, y encaja con los elementos de bola de tal manera que ambas placas son acopladas para ser retenidas cuando el elemento de leva es movido a la posición de bloqueo, y el elemento de leva tiene una superficie sesgada del lado del brazo (superficie de leva) conformada alrededor de la circunferencia exterior del mismo, mientras que el receptor de bola tiene una superficie sesgada del lado de la herramienta (superficie de leva) conformada alrededor de la circunferencia interior del mismo, de modo que la superficie sesgada del lado de la herramienta se inclina en dirección contraria con respecto a la superficie sesgada del lado del brazo.
El medio de bloqueo acopla mutuamente la placa principal y la placa de herramienta firmemente, con el elemento de leva localizado en la posición de bloqueo, y con los elementos de bola apretados por la superficie sesgada del lado del brazo de tal modo que quedan en contacto en la superficie sesgada del lado de la herramienta.
Además de ello, el medio de bloqueo revelado en la publicación abierta a inspección pública de la solicitud de patente japonesa N.° 4-63688 libera la acción de presión ejercida por la superficie sesgada del lado del brazo en dirección de los elementos de bola y quita el encajamiento de los elementos de bola con la superficie sesgada del lado de la herramienta, cuando el elemento de leva es movido a la posición de desbloqueo haciendo que la placa de herramienta se pueda separar de la placa principal.
Sin embargo, al desbloquear la placa principal y la placa de herramienta, cuando se separa la placa de herramienta de la placa principal liberando solamente la acción de presión ejercida por los elementos de bola en dirección de la superficie sesgada del lado de la herramienta, es necesario controlar la posición de la placa principal y de la placa de herramienta de tal manera que la superficie de acoplamiento de las mismas es puesta en posición horizontal para hacer que la placa de herramienta se separe de la placa principal debido al peso propio de la placa de herramienta.
Por consiguiente, en un robot o en el entorno laboral que no pueda controlar posición de tal manera que la superficie de acoplamiento de la placa principal y la placa de herramienta sea puesta en posición horizontal, no es posible hacer que la placa de herramienta se separe automáticamente por si sola. Es decir, en un brazo de robot en el que la superficie de acoplamiento de la placa principal y la placa de herramienta esté dirigida en una dirección distinta a la dirección horizontal, el operador, al realizar la el trabajo de reemplazo, tendrá que sacar y separar con fuerza la placa de herramienta de la placa principal, estando las placas desbloquedas. En este momento, existe el problema de que el trabajo de reemplazo resulta dificultoso y exige mucho tiempo.
RESUMEN DE LA INVENCIÓN
Un objetivo de la presente invención es el de poner a disposición un dispositivo de acoplamiento para brazos de robot en el que, aun cuando la superficie de acoplamiento de un elemento de fijación del lado del brazo y un elemento de fijación del lado de la herramienta esté dirigida en una dirección distinta a la dirección horizontal, el elemento de fijación del lado de la herramienta puede ser separado automáticamente para ser quitado del elemento de fijación del lado del brazo. Otro objetivo de la presente invención es el de poner a disposición un dispositivo de acoplamiento para brazos de robot en el que, al reemplazar una herramienta, el operador no tenga que retirar y separar con fuerza un elemento de fijación del lado de la herramienta de un elemento de fijación del lado del brazo, una herramienta pueda ser reemplazada automáticamente, y el trabajo de reemplazo pueda ser realizado fácilmente en un período de tiempo corto. Estos objetivos son conseguidos de acuerdo con la invención mediante un dispositivo que tiene las características de la reivindicación 1.
BREVE DESCRIPCIÓN DE LOS DIBUJOS
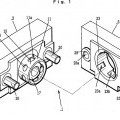
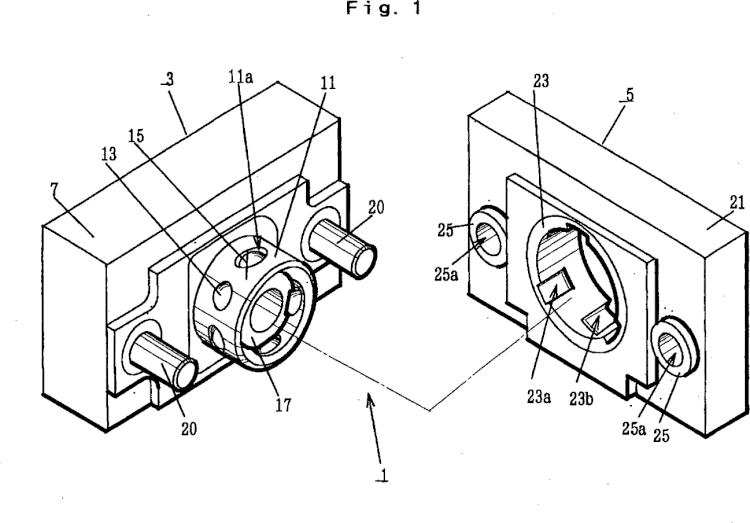
La figura 1 muestra una vista en perspectiva de un dispositivo de acoplamiento para brazos de robot;
La figura 2 muestra una vista en corte longitudinal del dispositivo de acoplamiento para brazos de robot, en la que un elemento de fijación del lado de la herramienta y un elemento de fijación del lado del brazo son separados;
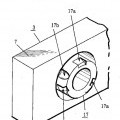
La figura 3 muestra una vista en perspectiva de un elemento de leva en la que un elemento soporte de bolas ha sido quitado del elemento de fijación del lado de la herramienta;
La figura 4 muestra una vista en perspectiva de un elemento receptor de bolas;
La figura 5 muestra una vista en corte longitudinal indicativa del estado inicial que se da al acoplar el elemento de fijación del lado de la herramienta y el elemento de fijación del lado del brazo;
La figura 6 muestra una vista en corte longitudinal indicativa del estado que se da al accionar un elemento de cilindro;
La figura 7 muestra una vista en corte longitudinal indicativa del estado bloqueado;
La figura 8 muestra una vista en corte longitudinal indicativa del estado inicial que se da al desbloquear;
La figura 9 muestra una vista en corte longitudinal indicativa del estado de empuje ocasionado al al hacerse el desbloqueo;
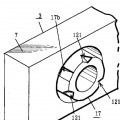
La figura 10 muestra una vista destinada a explicar una variación de ranuras inclinadas de empuje;
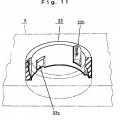
La figura 11 muestra una vista destinada a explicar una variación de ranuras inclinadas de separación; y
La figura 12 muestra una vista destinada a explicar una variación de ranuras inclinadas de bloqueo.
DESCRIPCIÓN DETALLADA DE LAS REALIZACIONES PREFERIDAS
<Primera Realización>
Haciendo referencia a las figuras 1 a 4, un dispositivo de acoplamiento para brazos de robot 1 incluye un elemento de fijación del lado del brazo 3 que está fijado al extremo anterior de un brazo de robot, no representado gráficamente, utilizando tornillos, etc., y un elemento de fijación del lado de la herramienta 5 al cual se fijan varias herramientas, tales como un mandril, utilizando tornillos, etc.
En el centro de la cara inferior de una platina estacionaria 7 del lado del brazo del elemento de fijación del lado del brazo 3, según queda representado, está dispuesto un espacio hueco 7a, el cual es circular en la sección transversal, que configura la cámara de cilindro de un elemento cilíndrico 9 – a modo de elemento de actuación – que se describirá más adelante. Por añadidura, a la platina estacionaria 7 del lado del brazo, alrededor del espacio hueco 7a, está fijado el extremo base de un elemento soporte de bolas 11 en forma de un cilindro está fijado utilizando tornillos, etc.
A través del elemento soporte de bolas 11, están dispuestos seis agujeros soporte de bola 11a, cada uno tiene su línea de eje extendida en una dirección perpendicular a la línea de eje del... [Seguir leyendo]
Reivindicaciones:
1. Un dispositivo de acoplamiento para brazos de robot que incluye
un elemento de fijación del lado del brazo (3) que está montado en un brazo de robot,
un elemento de fijación del lado de la herramiento (5) en el que se fijan herramientas,
un medio de bloqueo que tiene un elemento de leva (17) que está montado en el elemento de fijación del 5 lado del brazo (3) y tiene una pluralidad de ranuras inclinadas de bloqueo (17a) formadas alrededor de la línea del eje de la superficie circunferencial exterior del mismo,
un elemento de actuación (9) que desplaza el elemento de leva (17) entre la posición de bloqueo y la posición de desbloqueo,
un elemento soporte de bolas (11) que está dispuesto en el lado de la superficie circunferencial exterior del elemento de leva (17) y soporta de manera desplazable las bolas de bloqueo (13) correspondientemente dispuestas en las ranuras inclinadas de bloqueo (17a) en una dirección perpendicular a la dirección de desplazamiento del elemento de leva (17),
un elemento receptor de bolas (23) que está montado en el elemento de fijación del lado de la herramienta (5) y tiene una pluralidad de ranuras inclinadas de encajamiento (23a) con las cuales son encajadas las 15 bolas de bloqueo (13) que se deslizan en las ranuras inclinadas de bloqueo (17a) del elemento de leva (17)
desplazado a la posición de bloqueo,
en el que, cuando el elemento de leva (17) es desplazado de la posición de desbloqueo a la posición de bloqueo, las bolas de bloqueo (13) que se deslizan en las ranuras inclinadas de bloqueo (17a) para ser desplazadas al el exterior a lo largo de la dirección del radio son encajadas con las ranuras inclinadas de encajamiento (23a) a fin de acoplar mutuamente el elemento de fijación del lado del brazo (3) y el elemento de fijación del lado de la herramienta (5),
caracterizado en que
dicho dispositivo de acoplamiento para brazos de robot (1) comprende además
bolas de desbloqueo (15) que están dispuestas entre las bolas de bloqueo (13) y apoyadas de manera 25 desplazable por el elemento soporte de bolas (11) en una dirección perpendicular a la dirección de desplazamiento del elemento de leva (17);
una pluralidad de ranuras inclinadas de empuje (17b) que están formadas en la superficie circunferencial exterior del elemento de leva (17) entre las ranuras inclinadas de bloqueo (17a), y se inclinan en una dirección opuesta a la dirección de inclinación de las ranuras inclinadas de bloqueo (17a); y
30 una pluralidad de ranuras inclinadas de separación (23b) que están formadas en el elemento receptor de bolas (23) entre las ranuras inclinadas de encajamiento (23a), y se inclinan en una dirección opuesta a la dirección de inclinación de las ranuras inclinadas de encajamiento (23a),
en el que, cuando el elemento de leva (17) es desplazado de la posición de bloqueo a la posición de desbloqueo, el encajamiento de las bolas de bloqueo (13) encajadas con las ranuras inclinadas de encajamiento (23a) puede ser liberado, y las bolas de desbloqueo (15) que se deslizan en las ranuras inclinadas de empuje (17b) para ser desplazadas al el exterior a lo largo de la dirección del radio se hacen deslizar sobre las ranuras inclinadas de separación (23b) a fin de hacer posible empujar y apartar el elemento de fijación del lado de la herramienta (5) del elemento de fijación del lado del brazo (3).
40 2. El dispositivo de acoplamiento para brazos de robot de acuerdo con la reivindicación 1, en el que cada una de las ranuras inclinadas de bloqueo (17a) y las ranuras inclinadas de encajamiento (23a) es una superficie achaflanada que está inclinada en una dirección predeterminada.
3. El dispositivo de acoplamiento para brazos de robot de acuerdo con la reivindicación 1, en el
45 que, de las ranuras inclinadas de bloqueo (17a) y las ranuras inclinadas de encajamiento (23a), al menos las ranuras inclinadas de bloqueo (17a) son ranuras piramidales inclinadas, cada una de las cuales está configurada mediante la combinación de dos superficies triangulares.
4. El dispositivo de acoplamiento para brazos de robot de acuerdo con las reivindicaciones 1 a 3, 50 en el que cada una de las ranuras inclinadas de empuje (17b) y las ranuras inclinadas de separación (23b) está inclinada en una dirección predeterminada, y es circular en su sección transversal perpendicular a la dirección de desplazamiento del elemento de leva (17).
5. El dispositivo de acoplamiento para brazos de robot de acuerdo con la reivindicación 4, en el que cada una de las ranuras inclinadas de empuje (17b) y las ranuras inclinadas de separación (23b) es circular en su sección transversal perpendicular a la dirección de desplazamiento del elemento de leva (17), y tiene curvado su lado poco profundo de la ranura.
6. El dispositivo de acoplamiento para brazos de robot de acuerdo con las reivindicaciones 1 a 3, en el que cada una de las ranuras inclinadas de empuje (17b) y las ranuras inclinadas de separación (23b) es una superficie achaflanada plana que está inclinada en una dirección predeterminada.
7. El dispositivo de acoplamiento para brazos de robot de acuerdo con la reivindicación 1, en el
que el elemento de leva (17) es orientado al lado de la posición de bloqueo mediante la fuerza elástica de un 15 elemento elástico.
Patentes similares o relacionadas:
DISPOSITIVO, SISTEMA Y MÉTODO DE FIJACIÓN CONTROLABLE MEDIANTE UN BRAZO MECÁNICO, del 2 de Abril de 2020, de UNIVERSIDAD DE MALAGA: Dispositivo , sistema y método de fijación, controlables mediante un brazo mecánico , donde el dispositivo comprende al menos dos palancas abatibles […]
Máquina para llenar y envasar frascos, cartuchos, jeringas y similares, del 1 de Abril de 2020, de I.M.A. INDUSTRIA MACCHINE AUTOMATICHE S.P.A.: Una máquina para llenar y envasar frascos, cartuchos, jeringas y similares, que comprende una pared que separa una cámara operativa en […]
Dispositivo, sistema y método de fijación controlable mediante un brazo mecánico, del 27 de Marzo de 2020, de UNIVERSIDAD DE MALAGA: Dispositivo , sistema y método de fijación, controlables mediante un brazo mecánico , donde el dispositivo comprende al menos dos palancas abatibles […]
Mecanismo para cambio rápido de efector terminal robótico con acoplador magnético conmutable con soporte de momento, del 20 de Noviembre de 2019, de THE BOEING COMPANY: Un aparato de acoplamiento para cambio rápido de efector terminal robótico que comprende: un manipulador robótico que tiene movimiento controlable […]
Aparato de desconexión rápida para herramientas modulares, del 2 de Octubre de 2019, de Norgren Automation Solutions, LLC: Receptor de herramientas modulares, que comprende: una pared , que tiene un orificio que se extiende a través de la misma; […]
Abrazadera con un cilindro hidráulico de sujeción de carga con múltiples etapas telescópicamente extensibles, adaptadas para aplicar la fuerza de sujeción de carga alternativamente sensible a la fuerza de elevación de carga o al tamaño de la carga, del 3 de Julio de 2019, de CASCADE CORPORATION: Un sistema hidráulico de sujeción y elevación de carga que incluye al menos un cilindro hidráulico de sujeción de carga de un tipo con al menos una […]
Sistema adaptado a un robot para manipular objetos voluminosos, del 22 de Mayo de 2019, de PROYTECSA SECURITY, S.L: Un sistema adecuado para adaptarse a un robot que presenta un brazo articulado rematado en pinza, comprendiendo el sistema, para cada una de las hojas que conforma la pinza […]
Disposición de rampa con característica de extracción, del 17 de Mayo de 2019, de BECKMAN COULTER, INC.: Elemento adaptado para liberar un objeto agarrado por una unidad de agarre, en el que dicha unidad de agarre incluye una pluralidad […]