UN ROBOT INDUSTRIAL CON MEDIOS DETECTORES EN LA REGION DE UNA BRIDA DE HERRAMIENTA.
Un robot industrial que tiene una brida de herramienta (8) en el extremo de un brazo externo del robot,
teniendo la brida de herramienta medios (10) para fijar una herramienta (7) a la misma y teniendo el robot adicionalmente medios detectores adaptados para detectar fuerzas y/o pares aplicados a una herramienta fijada a dicha brida de herramienta, caracterizado por que la brida de herramienta (8) es integral con un soporte de brida de herramienta (13, 30, 39) en forma de un pasador de eje o similares y por que dicho medio detector comprende al menos un miembro detector (14, 15, 23-28) incorporado en la brida de herramienta (8) y/o al menos un miembro detector dispuesto sobre el soporte de brida de herramienta (13, 30, 39)
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E05108539.
Solicitante: ABB AB.
Nacionalidad solicitante: Suecia.
Dirección: KOPPARBERGSVAGEN 2,721 83 VASTERAS.
Inventor/es: JOHANSSON,GORGEN, JONSSON,INGVAR.
Fecha de Publicación: .
Fecha Solicitud PCT: 16 de Septiembre de 2005.
Fecha Concesión Europea: 25 de Noviembre de 2009.
Clasificación Internacional de Patentes:
- B25J13/08F
Clasificación PCT:
- B25J13/08 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › B25J 13/00 Controles para manipuladores (controles por programa B25J 9/16). › por medio de dispositivos sensores, p. ej. a la visión o al tacto.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
Fragmento de la descripción:
Un robot industrial con medios detectores en la región de una brida de herramienta.
Campo técnico de la invención y técnica anterior
La invención se refiere a un robot industrial que tiene una brida de herramienta en el extremo de un brazo externo del robot con medios para fijar una herramienta a la misma y medios detectores adaptados para detectar fuerzas y/o pares aplicados a una herramienta fijada a dicha brida de herramienta.
Están comprendidos todos los tipos de robots industriales que tengan una brida de herramienta. Esta brida de herramienta, también denominada accesorio de herramienta, preferiblemente, pero no necesariamente, se puede girar con respecto a dicho brazo de robot alrededor de un eje central de dicha brida.
El número de ejes de tal robot industrial, con frecuencia, es de seis para obtener una máxima libertad de movimiento de una herramienta fijada a dicha brida de herramienta. Sin embargo, la invención también comprende robots industriales que tienen menos de seis ejes, tal como solamente cuatro, dependiendo del trabajo que se desea realizar con el robot. Un robot convencional de este tipo que tiene seis ejes se muestra esquemáticamente a modo de ejemplo en la Figura 1 adjunta, en la que los seis ejes se indican con los números de referencia 1-6. Por consiguiente, en este caso, el número de eje 6 es el que gira la brida de herramienta alrededor eje central de la misma.
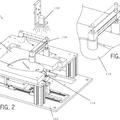
La Figura 2 adjunta muestra cómo una herramienta 7 (tal como una herramienta de molienda mostrada en la Figura 1) se fija normalmente de forma directa a dicha brida de herramienta 8 mediante medios de fijación en forma de pernos 9 y orificios roscados 10 en la brida de herramienta.
Sin embargo, en ocasiones existe una necesidad de medir fuerzas y/o pares aplicados a una herramienta fijada a dicha brida de herramienta para garantizar que se obtengan las fuerzas deseadas para un buen resultado de un proceso realizado por la herramienta. Tales aplicaciones de robot son con frecuencia, por ejemplo, diferentes tipos de trabajo de ensamblaje dentro de los campos de la electrónica y aparatos domésticos, pulido, esmerilado, por ejemplo, de grifos y álabes de turbina, molienda (en este documento también para proteger la herramienta), limpieza y soldadura por fricción con agitación, por ejemplo, en las industrias automovilísticas y de aviación. Los medios detectores también se pueden usar para medir fuerzas en un proceso, por ejemplo, para comprobar detalles elásticos después del montaje.
Una tercera posibilidad es usar el medio detector para proteger un objeto manipulado por la herramienta y/o la propia herramienta. Esto es especialmente, pero no exclusivamente, el caso en el que el robot está adaptado para manipular objetos para los que tales fuerzas y/o pares se tienen que mantener por debajo de niveles comparativos bajos. Un robot industrial puede, por ejemplo, mediante la herramienta del mismo, no aplicar ninguna fuerza sustancial sobre componentes, tales como ruedas de engranajes, cuando ensambla una caja de cambios, por ejemplo, para un coche. En tal caso, el robot industrial tiene que estar provisto de un medio detector como se define en la introducción.
La Figura 3 muestra cómo los robots industriales se han provisto de tales medios detectores hasta ahora. El medio detector 11 se fija a la brida de herramienta 8 y después, la herramienta 7 se fija al medio detector. Por tanto, el medio detector forma una parte intermedia entre la brida de la herramienta y la herramienta que aumenta los pares aplicados por la herramienta sobre partes del robot en el extremo de dicho brazo externo, tal como con respecto principalmente a dicho quinto eje en el caso de un robot de acuerdo con la Figura 1. Por lo tanto, el medio detector detecta fuerzas y/o pares aplicados a la brida de la herramienta y, por tanto, indirectamente a una herramienta fijada a dicha brida de herramienta y esto se tiene que interpretar como lo mismo en esta descripción. Este aumento en la distancia entre la brida de la herramienta y la herramienta puede ser incluso mayor que el grosor del medio detector, ya que pueden ser necesarios discos adaptadores a ambos lados del medio detector para permitir la fijación del mismo a la brida de herramienta y un miembro de fijación 12 de la herramienta. Este denominado "desplazamiento añadido" provoca un esfuerzo adicional sobre la rigidez de las partes del robot, lo que es perjudicial para la precisión de los movimientos de la herramienta y, por eso, puede reducir la capacidad de carga de trabajo del robot. Esto puede dar como resultado un aumento de coste, ya que se puede requerir un robot mayor. En el peor de los casos, tal medio detector puede, de hecho, hacer que la aplicación de robot sea inapropiada o imposible. Además, los medios detectores de este tipo son extremadamente costosos y constituyen una parte considerable de los costes del robot industrial que están en el mismo orden que los costes para el resto de las partes estructurales (el manipulador) del robot.
En el documento JP-A- 06 083435 se describe un industrial que tiene un sensor localizado en el extremo de un brazo de robot, sobre cuyo brazo se conecta de forma móvil una herramienta de esmerilado. El sensor se usa por un operario para detectar el contacto y el punto de contacto de la herramienta sobre una superficie de trabajo, con propósitos de enseñanza. La información se almacena y los datos se reproducen en el momento de la operación real del robot.
En el documento JP-A- 62 059826 se describe un dispositivo de detección de fuerza dispuesto en una cubierta y encajado en un brazo de robot. El dispositivo incluye detectores de desplazamiento dispuestos sobre palancas elásticas. Se unen galgas extensiométricas a las palancas elásticas y se detectan y equilibran las salidas de deformación.
En el documento JP-A-06 083435 se describe una carcasa con un dispositivo detector de potencia, carcasa que se une al extremo de un brazo de robot.
En el documento US-A- 5 513 536 se describe un dispositivo de medición que se dispone entre una parte de brazo de un aparato de manejo y un portaherramientas unido al brazo, para medir fuerzas aplicadas al portaherramientas.
Sumario de la invención
El objeto de la presente invención es proporcionar un robot industrial del tipo que se ha definido en la introducción que reduzca los anteriores inconvenientes de tales robots ya conocidos. El objeto se consigue por un robot industrial como se define en la reivindicación de patente 1.
En tal robot industrial, dicho medio detector se incorpora en la estructura del robot en la región de dicha brida de herramienta. Esto significa que dicho "desplazamiento adicional" para proporcionar al robot medios detectores se puede evitar o reducir, de tal forma que la capacidad de carga de trabajo del robot se puede mantener sustancialmente al mismo nivel que para un robot sin dicho medio detector, de tal forma que no se necesita un robot más grande para manejar una carga dada con una precisión predeterminada. Además, no se necesita ningún medio detector costoso, ya que se pueden proporcionar medios detectores incorporados en la estructura del robot a un coste sustancialmente menor que los medios detectores separados usados hasta ahora (Fig. 3).
De acuerdo con una realización de la invención, dicho medio detector comprende uno o más miembros detectores montados en la brida de herramienta, que constituye un modo favorable de realizar la presente invención que tiene muy poca influencia sobre la construcción del robot.
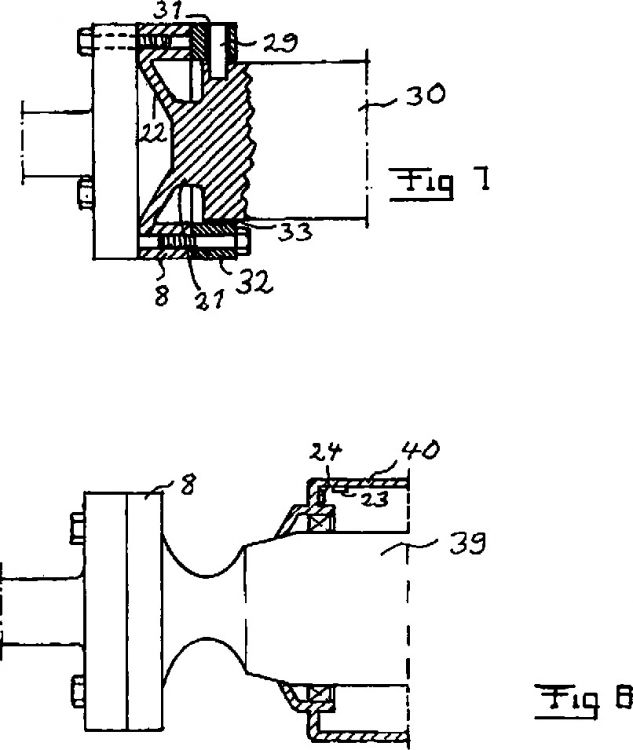
De acuerdo con otra realización de la invención, dicho medio detector comprende uno o más miembros detectores dispuestos sobre un soporte en forma de un pasador de eje o similares que es integral con la brida de herramienta. Esta disposición alternativa de dichos miembros detectores puede reducir en algunas circunstancias el impacto de la disposición del medio detector sobre la construcción del robot incluso menos. Estas dos realizaciones se pueden combinar muy bien, de tal forma que el medio detector se puede incorporar en la brida de herramienta así como disponerse sobre dicho soporte.
De acuerdo con otra realización de la invención, dicho medio detector comprende al menos un tensiómetro fijado a la brida de herramienta o una parte conectada de forma rígida a la misma. El uso de tensiómetro para detectar fuerzas y/o pares aplicados a una herramienta fijada a una brida de herramienta da como resultado un ahorro de costes notable con respecto a los medios detectores usados hasta ahora mientras que se mantiene una fiabilidad alta. "Tensiómetro"...
Reivindicaciones:
1. Un robot industrial que tiene una brida de herramienta (8) en el extremo de un brazo externo del robot, teniendo la brida de herramienta medios (10) para fijar una herramienta (7) a la misma y teniendo el robot adicionalmente medios detectores adaptados para detectar fuerzas y/o pares aplicados a una herramienta fijada a dicha brida de herramienta, caracterizado por que la brida de herramienta (8) es integral con un soporte de brida de herramienta (13, 30, 39) en forma de un pasador de eje o similares y por que dicho medio detector comprende al menos un miembro detector (14, 15, 23-28) incorporado en la brida de herramienta (8) y/o al menos un miembro detector dispuesto sobre el soporte de brida de herramienta (13, 30, 39).
2. Un robot de acuerdo con la reivindicación 1, en el que al menos un miembro detector (14, 15, 23-28) comprende un tensiómetro fijado a la brida de herramienta (8).
3. Un robot de acuerdo con la reivindicación 1 ó 2, en el que al menos un miembro detector (14, 15, 23-28) comprende un tensiómetro fijado al soporte (13).
4. Un robot de acuerdo con la reivindicación 1, en el que al menos un miembro detector (14, 15, 23-28) se dispone para detectar fuerzas y/o pares de acuerdo con una pluralidad de grados de libertad.
5. Un robot de acuerdo con la reivindicación 4, en el que seis miembros detectores (23-28) se disponen para detectar fuerzas y/o pares de acuerdo con una pluralidad de grados de libertad.
6. Un robot de acuerdo con cualquiera de las reivindicaciones precedentes, en el que dicha brida de herramienta (8) comprende un anillo (20) provisto de dicho medio de fijación de herramienta y conectado mediante radios sustancialmente rígidos (22) con un cubo interno (21) fijado al soporte (13) conectado a dicho brazo y por que dicho medio detector comprende al menos un miembro detector (23-28) dispuesto sobre al menos uno de dichos radios.
7. Un robot de acuerdo con cualquiera de las reivindicaciones precedentes, en el que el al menos un miembro detector (14, 15, 23-28) es un tensiómetro que cambia la resistividad cuando se extiende o comprime.
8. Un robot de acuerdo con cualquiera de las reivindicaciones precedentes, en el que el al menos un miembro detector (14, 15, 23-28) es un elemento piezo-resistivo.
9. Un robot de acuerdo con cualquiera de las reivindicaciones precedentes, en el que la brida de herramienta (8) comprende una disposición electrónica (16) y por que el al menos un miembro detector (14, 15, 23-28) está conectado a dicha disposición electrónica para suministrar señales de medición a una unidad (19) que controla el funcionamiento del robot.
10. Un robot de acuerdo con la reivindicación 9, en el que un cable (18) se dispone para conectar dicha disposición electrónica (16) a dicha unidad de control (19).
11. Un robot de acuerdo con la reivindicación 10, en el que el cable (18) se dispone dentro del soporte (13).
12. Un robot de acuerdo con cualquiera de las reivindicaciones precedentes, en el que dicha brida de herramienta (8) se dispone para girarse con respecto a dicho brazo de robot alrededor de un eje central de dicha brida.
13. Un método para detectar fuerzas y/o pares aplicados a una herramienta (7) fijada a una brida de herramienta (8) de un robot industrial, que comprende medir las fuerzas y/o pares que actúan sobre la brida de herramienta (8) y/o soporte de brida de herramienta (13) mediante al menos un miembro detector (14, 15, 23-28) incorporado en la brida de herramienta (8) y/o al menos un miembro detector dispuesto sobre el soporte de brida de herramienta (13) y determinar de este modo las fuerzas y/o pares que actúan sobre la herramienta (7), por lo que la brida de herramienta es integral con el soporte de brida de herramienta en forma de un pasador de eje o similares.
14. Un método de acuerdo con la reivindicación 13, que comprende la evaluación de fuerzas de acuerdo con tres grados de libertad y pares de acuerdo con tres grados de libertad.
Patentes similares o relacionadas:
Procedimiento para el monitoreo del transporte de recipientes de líquidos en un dispositivo de análisis automático, del 15 de Julio de 2020, de SIEMENS HEALTHCARE DIAGNOSTICS PRODUCTS GMBH: Procedimiento para el monitoreo del transporte de un recipiente de líquido con una pinza de sujeción pasiva fijada a un brazo de transferencia […]
SISTEMA Y PROCEDIMIENTO PARA EL RECAMBIO DE REVESTIMIENTOS, CUYA CONFIGURACIÓN PERMITE RETIRAR E INTRODUCIR, EN FORMA AUTOMATIZADA, REVESTIMIENTOS DE UN MOLINO UTILIZADO PARA LA MOLIENDA DE MINERAL, del 2 de Julio de 2020, de MI ROBOTIC SOLUTIONS S.A: Un sistema y procedimiento para el recambio de revestimientos de un molino, cuya configuración permita la manipulación automatizada y robótica […]
Procedimiento de tratamiento de una superficie, y autómata correspondiente, del 20 de Mayo de 2020, de Les Companions: Procedimiento de tratamiento de una superficie a tratar, por medio de un autómata que consta de: - una base configurada para […]
EQUIPO PARA LA DETECCIÓN RÁPIDA DE AVERÍAS EN UNA CADENA DE MONTAJE, del 28 de Abril de 2020, de PARRA VIOLETA, Alejandro: 1. Equipo para la detección rápida de averías en una cadena de montaje que, aplicable para su incorporación en una instalación de producción en […]
Dispositivo automatizado con una estructura móvil, en concreto un robot, del 19 de Febrero de 2020, de COMAU S.P.A.: Dispositivo automatizado , en concreto, un robot, que comprende: - una estructura móvil (4 a 8; 103; 203; 301); - medios de accionamiento […]
Sistema de laminado automatizado de chapas y método de colocación, del 19 de Febrero de 2020, de THE BOEING COMPANY: Un sistema para la colocación de chapas de compuesto en localizaciones preseleccionadas; que comprende: un robot ; un efector […]
Cobertura sensorizada para dispositivo industrial, del 19 de Febrero de 2020, de COMAU S.P.A.: Dispositivo automatizado , en concreto, un robot, que comprende: - una estructura móvil (4 a 8; 103; 203; 301); - medios de accionamiento (M; […]
 Dispositivo y método de colocación de módulo, del 25 de Diciembre de 2019, de Muth Mirror Systems, LLC: Dispositivo de colocación de módulo para fijar un módulo que tiene una fuente de luz y un reflector sobre un sustrato de espejo , comprendiendo […]
Dispositivo y método de colocación de módulo, del 25 de Diciembre de 2019, de Muth Mirror Systems, LLC: Dispositivo de colocación de módulo para fijar un módulo que tiene una fuente de luz y un reflector sobre un sustrato de espejo , comprendiendo […]