Dispositivo y método de colocación de módulo.
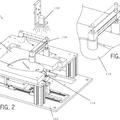
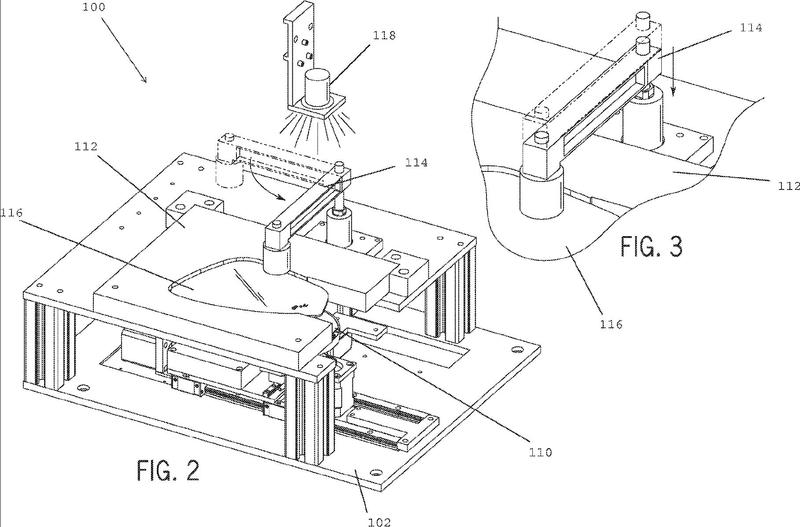
Dispositivo de colocación de módulo (100) para fijar un módulo (118) que tiene una fuente de luz y un reflector sobre un sustrato de espejo (116),
comprendiendo el dispositivo de colocación de módulo:
un accesorio de sustrato de espejo (112) para fijar al menos parcialmente el sustrato de espejo (116);
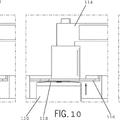
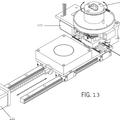
un accesorio de módulo (110) que puede posicionarse mediante una pluralidad de accionadores de reposicionamiento, pudiendo moverse el accesorio de módulo (110) por los accionadores de reposicionamiento con respecto al accesorio de sustrato de espejo (112), siendo el accesorio de módulo (110) capaz de sostener el módulo (118), presionar el módulo (118) contra el sustrato de espejo (116), y liberar el módulo (118);
un controlador conectado a la pluralidad de accionadores de reposicionamiento para controlar el movimiento de los accionadores de reposicionamiento, en el que el controlador incluye un procesador, una memoria y un programa en comunicación con la memoria de controlador;
en el que el programa incluye la geometría del módulo (118) y el sustrato de espejo (116), y en el que el controlador está configurado para controlar el movimiento de los accionadores de reposicionamiento basándose al menos en parte por la geometría proporcionada por el programa;
una cámara (118) en comunicación con el controlador y en posición de línea de visión con respecto a al menos una parte del sustrato de espejo (116) y al menos una parte del módulo (118), en el que la cámara (118) está configurada para capturar una o más imágenes de la al menos una parte del sustrato de espejo (116) y la al menos una parte del módulo (118) cuando el módulo (118) se ha movido por el accesorio de módulo (110) a lo largo de un eje Z hasta la altura del sustrato (116); y
en el que el controlador está configurado para recibir y procesar las imágenes para determinar la posición relativa del módulo (118) y el sustrato de espejo (116) a través de identificación visual de marcas sobre el sustrato de espejo (116) y el módulo (118), y comparar la posición relativa del módulo (118) y el sustrato de espejo (116) con respecto a una posición relativa deseada, y calcular el accionamiento necesario de los accionadores de reposicionamiento a lo largo de un eje X, un eje Y, un eje Z y un eje de rotación alrededor del eje Z con el fin de obtener la posición relativa deseada, y en el que el controlador se programa para bajar el accesorio de módulo (110) a lo largo del eje Z y accionar los accionadores de reposicionamiento para mover el módulo (118) a la posición relativa deseada mediante el ajuste del módulo (118) a lo largo del eje X, el eje Y y el eje de rotación alrededor del eje Z, y elevar el módulo (118) a lo largo del eje Z un tiempo posterior con el fin de presionar el módulo (118) contra el sustrato de espejo (116).
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/US2014/031088.
Solicitante: Muth Mirror Systems, LLC.
Inventor/es: VANDERPUY,THOMAS.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B25J13/08 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › B25J 13/00 Controles para manipuladores (controles por programa B25J 9/16). › por medio de dispositivos sensores, p. ej. a la visión o al tacto.
- G05B19/418 FISICA. › G05 CONTROL; REGULACION. › G05B SISTEMAS DE CONTROL O DE REGULACION EN GENERAL; ELEMENTOS FUNCIONALES DE TALES SISTEMAS; DISPOSITIVOS DE MONITORIZACION O ENSAYOS DE TALES SISTEMAS O ELEMENTOS (dispositivos de maniobra por presión de fluido o sistemas que funcionan por medio de fluidos en general F15B; dispositivos obturadores en sí F16K; caracterizados por particularidades mecánicas solamente G05G; elementos sensibles, ver las subclases apropiadas, p. ej. G12B, las subclases de G01, H01; elementos de corrección, ver las subclases apropiadas, p. ej. H02K). › G05B 19/00 Sistemas de control por programa (aplicaciones específicas, ver los lugares apropiados, p. ej. A47L 15/46; relojes que implican medios anejos o incorporados que permiten hacer funcionar un dispositivo cualquiera en un momento elegido de antemano o después de un intervalo de tiempo predeterminado G04C 23/00; marcado o lectura de soportes de registro con una información digital G06K; registro de información G11; interruptores horarios o de programa horario que se paran automáticamente cuando el programa se ha realizado H01H 43/00). › Control total de una fábrica, es decir, control centralizado de varias máquinas, p. ej. control numérico directo o distribuido (DNC), sistemas de fabricación flexibles (FMS), sistemas de fabricación integrados (IMS), fabricación integrada por computador (CIM).
PDF original: ES-2768621_T3.pdf
Patentes similares o relacionadas:
Sistema de trabajo estéril, del 1 de Julio de 2020, de Shibuya Corporation: Un sistema de trabajo estéril para permitir que un trabajador realice un trabajo estéril requerido para cultivo dentro de una cámara estéril del sistema que tiene […]
Controlador de sistema transportador, sistema transportador y método de sincronización de datos, del 1 de Julio de 2020, de EWAB Engineering AB: Un controlador de sistema transportador , que comprende: una unidad de almacenamiento de datos configurada para almacenar una […]
Procedimiento y disposición para el control remoto de dispositivos de campo de al menos un sistema de automatización, del 17 de Junio de 2020, de SCHNEIDER ELECTRIC INDUSTRIES SAS: Procedimiento para el control remoto de al menos un dispositivo de campo (D1... Dn) en al menos un sistema de automatización (P1... Pk) con una unidad de control (BG); […]
Dispositivo y método para la transmisión de datos, del 10 de Junio de 2020, de DR. JOHANNES HEIDENHAIN GMBH: Dispositivo para la transmisión de datos con una interfaz de aparato de medición , una interfaz de control y una interfaz adicional […]
Procedimiento para hacer funcionar una planta de producción y planta de producción, del 3 de Junio de 2020, de SEW-EURODRIVE GMBH & CO. KG: Procedimiento para hacer funcionar una planta de producción son que la planta de producción tiene un sistema de control de nivel superior, estaciones de trabajo […]
Métodos y aparatos para el control de calidad guiado de un sistema de envasado, del 6 de Mayo de 2020, de TETRA LAVAL HOLDINGS & FINANCE S.A.: Método para el control de calidad de un sistema de envasado, comprendiendo dicho método: recibir un registro de datos de identificación de envasado, estando relacionado […]
Sistema y método de control en bucle cerrado de firma de objetivo, del 6 de Mayo de 2020, de EMHART GLASS S.A.: Un sistema para ajustar automáticamente la regulación temporal de sucesos de operaciones en cavidades de una sección de una máquina de secciones individuales, […]
Sistema transportador multizona con control basado en LAN, del 6 de Mayo de 2020, de MILWAUKEE ELECTRONICS CORPORATION: Un sistema de control de transportador para controlar un sistema transportador , configurado para transportar una serie de cargas, y […]