MAQUINA DE GRAPAR.
Máquina de grapar para separar y cerrar un envoltorio de forma tubular lleno de producto,
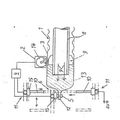
con por lo menos dos parejas (420, 440) de elementos desplazadores (422, 424; 442, 444) radialmente opuestos entre sí y distanciados axialmente con relación al eje (46) del tubo flexible del envoltorio, que están unidos a una guía lineal (56, 58) y preparados para el estrangulamiento local del envoltorio lleno y formar una ristra tubular (32) desplazándose para ello de forma lineal en dirección radial aproximándose entre sí y a continuación separándose axialmente por parejas, una primera herramienta de cierre (28) dispuesta de forma giratoria y una segunda herramienta de cierre (26), estando la primera y la segunda herramienta de cierre (26, 28) preparada para ser aproximadas en dirección radial entre sí con el fin de colocar y cerrar por lo menos una grapa de cierre (30) alrededor de la ristra tubular formada (32) entre las parejas de elementos desplazadores (420 y 440) separadas axialmente entre sí, caracterizada porque el sentido de movimiento radial de las parejas de elementos desplazadores (420 y 440) coincide esencialmente con la dirección de movimiento radial de las herramientas de cierre (26, 28)
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E07015727.
Solicitante: POLY-CLIP SYSTEM GMBH & CO. KG.
Nacionalidad solicitante: Alemania.
Dirección: WESTERBACHSTRASSE 45,60489 FRANKFURT AM MAIN.
Inventor/es: EBERT,DETLEF, HUMMEL,MICHAEL.
Fecha de Publicación: .
Fecha Solicitud PCT: 9 de Agosto de 2007.
Fecha Concesión Europea: 21 de Octubre de 2009.
Clasificación Internacional de Patentes:
- A22C11/12B
Clasificación PCT:
- A22C11/12 NECESIDADES CORRIENTES DE LA VIDA. › A22 CARNICERIA; TRATAMIENTO DE LA CARNE; TRATAMIENTO DE LAS AVES DE CORRAL O DEL PESCADO. › A22C TRATAMIENTO DE LA CARNE, DE LAS AVES DE CORRAL O DEL PESCADO (conservas A23B; producción de composiciones a base de proteínas para la alimentación A23J 1/00; productos alimenticios a base de pescado, carne o aves de corral A23L; trituración, p. ej. picado de la carne B02C 18/00; preparación de proteínas en sí C07K 1/00). › A22C 11/00 Fabricación de embutidos. › Aparatos para anudar las pieles de los embutidos.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
Fragmento de la descripción:
Máquina de grapar.
La invención se refiere a una máquina de grapar para dividir y cerrar un envoltorio de forma tubular (tubo flexible de empaquetado) lleno de producto, con un mínimo de dos parejas de elementos desplazadores enfrentados radialmente entre sí y separados axialmente respecto al eje del tubo flexible de empaquetado (eje del tubo flexible), que están unidos a una guía lineal y preparados para efectuar el estrangulamiento local del envoltorio lleno y formar una ristra tubular, desplazándose linealmente para aproximarse entre sí y a continuación separándose axialmente por parejas, con una primera y una segunda herramienta de cierre que está preparada para colocar y cerrar una grapa de cierre (clip) alrededor de la ristra tubular formada entre las parejas de elementos desplazadores separados axialmente entre sí, siendo acercadas entre sí en dirección radial.
Máquinas grapadoras de esta clase se conocen por ejemplo por el documento DE 196 44 074 C1 ó el EP-A-900 733. Esta clase de máquinas grapadoras se utilizan para cerrar tubos flexibles de empaquetado de forma tubular, tripas o tripas sintéticas - es decir embutidos - que estén llenos de un contenido líquido a pastoso o también (parcialmente) granulado.
Durante este proceso se introduce primeramente el producto en el envoltorio (llenado) que a continuación se divide en porciones mediante los elementos desplazadores (desplazadores). Los elementos desplazadores de cada pareja llevan unos escotes en forma de V enfrentados entre sí mediante los cuales estrangulan la envoltura del producto cuando se desplazan radialmente en dirección linear aproximándose entre sí, desplazando en dirección axial el producto que se encuentra en la zona de estrangulamiento (todas las indicaciones de dirección se refieren aquí al eje del tubo flexible). Separando a continuación en dirección axial las dos parejas de elementos desplazadores se va formando una ristra tubular alargada sobre la cual se aplican en la operación siguiente, uno, o en el caso de una disposición en "doble pareja", dos elementos de cierre mediante las correspondientes herramientas de cierre.
La primera herramienta de cierre (matriz) y la segunda herramienta de cierre (punzón) tienen en esta disposición de la máquina un accionamiento en dirección transversal al movimiento lineal de los elementos desplazadores. Las herramientas de cierre se encuentran durante el llenado y durante la mayor parte después durante el desplazamiento en su posición abierta desde la cual se llevan a su posición de cierre, deformándose la grapa al alcanzar la posición de cierre. Una vez efectuado el cierre las palancas de cierre con las herramientas de cierre se vuelven a llevar a su posición de origen o posición abierta.
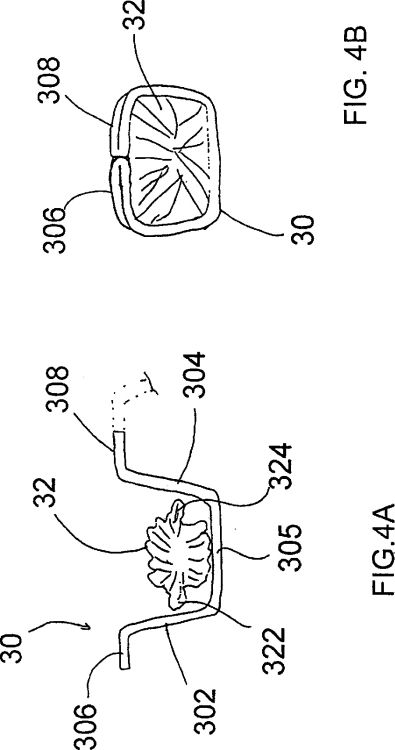
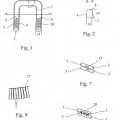
Con la máquina grapadora descrita inicialmente se colocan por ejemplo grapas que se van fabricando a partir de una tira de alambre de aluminio estampada donde las grapas están precurvadas en forma de U y van cogidas entre sí mediante unos puentes acodados situados en los extremos de sus brazos. La tira de grapas formada de este modo se conduce a la primera herramienta de cierre, a la matriz, a lo largo de una pista de guiado que desemboca en la zona de la correspondiente herramienta de cierre.
La primera de las grapas se alimenta durante el transporte de la fila de grapas hacia la matriz de modo conocido por un medio de avance que ataca de forma intermitente. Mientras la primera de las grapas esté todavía unida a la fila de grapas siguiente queda sujeta por ésta de forma estable en la matriz. Al efectuar el cierre, se desplaza primeramente la matriz a su posición de cierre o fin de carrera. En esta posición, la primera de las grapas es presionada contra la ristra tubular y se cierra entre ésta y la matriz.
De forma decalada en el tiempo, es decir mientras la matriz esté todavía en esta posición, el punzón se desplaza contra la matriz. Inmediatamente antes de cerrar la grapa se separa primeramente la grapa primera de la siguiente tira de grapas. En este momento, la primera de las grapas queda libre y solamente queda apretada contra la matriz por la tensión de la ristra tubular. A continuación y mediante otra aproximación más del punzón hacia la matriz se deforma el clip hasta que las herramientas de cierre se hayan acercado entre sí hasta la altura de grapado y la grapa quede cerrada alrededor de la ristra tubular.
Durante el proceso de cierre se comprimen los puentes de los extremos de los brazos de la grapa contra la cara exterior de los brazos de la pinza, y se doblan con éstos alrededor de la ristra del material empaquetado, para lo cual los extremos de los brazos y los tramos del puente se comprimen entre sí a tope y se recalcan de modo que se forma un anillo que comprime de la forma más cerrada posible la ristra del material empaquetado.
En determinados casos, concretamente cuando se trata de un material de empaquetado relativamente rígido, pueden llegar a producirse fallos de funcionamiento, especialmente porque la ristra tubular formada por los elementos desplazadores y colocada en la cámara de cierre todavía abierta, queda un poco destensada, especialmente en la zona de solape de los elementos desplazadores que trabajan siempre juntos por parejas. Durante el subsiguiente cierre de la grapa alrededor de la ristra tubular existe el riesgo de que se lesione el material de empaquetado y/o no quede abarcado completamente por la grapa cerrada, de modo que el cierre no es estanco.
Este problema ya es conocido. Por ejemplo en el documento EP 1 140 633 B1 se intenta ponerle remedio para lo cual antes de cerrar la grapa se empuja la ristra tubular en dirección axial al lado de la pinza de cierre mediante un sujetador dispuesto al lado de las herramientas de cierre, en sentido hacia el plano del fondo de la grapa, de modo que la ristra no se pueda abrir en sentido hacia el orificio de la grapa que por ahora todavía está sin cerrar. Pero sin embargo la elaboración de diferentes materiales para los tubos flexible de empaquetado y distintas secciones de tubo flexible requiere la adaptación del sujetador a la correspondiente sección de la ristra. Debido al riesgo potencial de un error de manipulación no se desea por principio utilizar un cambio de herramientas.
El objetivo de la presente invención es por lo tanto realizar de modo sencillo el proceso de cierre de forma más segura.
Este objetivo se resuelve en una máquina de grapado de la clase citada inicialmente por el hecho de que la dirección de desplazamiento radial de las parejas de elementos desplazadores coincide esencialmente con la dirección de movimiento de las herramientas de cierre.
La invención se basa en el conocimiento de que uno de los motivos principales para que se abra la ristra tubular es la orientación de los elementos desplazadores que trabajan juntos por parejas y que se solapan a modo de tijera. Favorecidos por el movimiento de separación axial de los elementos desplazadores y del consiguiente movimiento relativo entre la ristra tubular y los elementos desplazadores de cada pareja, el material de la funda tubular tiende a penetrar en el intersticio entre las tijeras desplazadoras que actúan conjuntamente. Es entonces cuando se produce localmente el despliegue o apertura antes citada. Dado que en las máquinas grapadoras conocidas de la clase citada inicialmente el movimiento de apertura / cierre de las tijeras desplazadoras por una parte y el movimiento de las herramientas de cierre por otra ha tenido lugar de forma ortogonal entre sí, el intersticio de los elementos desplazadores que solapan por parejas a modo de tijera se encontraba siempre en el sentido del movimiento de las herramientas de cierre. En consecuencia el despliegue también tenía lugar principalmente en esta dirección. El despliegue de la ristra arrezagada consecuentemente era mayor en la dirección del brazo de la grapa que antes de efectuarse el cierre todavía estaba abierta, que en la dirección perpendicular a éste. Pero precisamente esta dilatación provoca que al efectuar el plegado los brazos de la grapa pueden llegar a pillar en determinadas circunstancias un pliegue de la ristra, y la pueden dañar.
Frente a esto, en la disposición conforme a la invención de los elementos desplazadores o su dirección de movimiento, el plano de la extensión máxima de la ristra es transversal a los brazos de las grapas abiertas, de modo que se reduce el riesgo de dañar la envoltura del empaquetado. De este modo se favorece además el empleo de una grapa con brazos más cortos, en particular para cerrar una ristra delgada, con lo cual se precisa menos trabajo de recalcado...
Reivindicaciones:
1. Máquina de grapar para separar y cerrar un envoltorio de forma tubular lleno de producto, con por lo menos dos parejas (420, 440) de elementos desplazadores (422, 424; 442, 444) radialmente opuestos entre sí y distanciados axialmente con relación al eje (46) del tubo flexible del envoltorio, que están unidos a una guía lineal (56, 58) y preparados para el estrangulamiento local del envoltorio lleno y formar una ristra tubular (32) desplazándose para ello de forma lineal en dirección radial aproximándose entre sí y a continuación separándose axialmente por parejas, una primera herramienta de cierre (28) dispuesta de forma giratoria y una segunda herramienta de cierre (26), estando la primera y la segunda herramienta de cierre (26, 28) preparada para ser aproximadas en dirección radial entre sí con el fin de colocar y cerrar por lo menos una grapa de cierre (30) alrededor de la ristra tubular formada (32) entre las parejas de elementos desplazadores (420 y 440) separadas axialmente entre sí, caracterizada porque el sentido de movimiento radial de las parejas de elementos desplazadores (420 y 440) coincide esencialmente con la dirección de movimiento radial de las herramientas de cierre (26, 28).
2. Máquina grapadora según la reivindicación 1, caracterizada porque la primera herramienta de cierre (28) va fijada a una primera palanca de cierre (14) inferior, y va apoyada y accionada giratoriamente junto con ésta.
3. Máquina grapadora según la reivindicación 2, caracterizada porque la segunda herramienta de cierre (26) está unida a una guía lineal (12).
4. Máquina grapadora según una de las reivindicaciones anteriores, caracterizada por un sistema de control preparado para desplazar aproximándose entre sí en dirección radial las herramientas de cierre (26, 28), solapando en el tiempo con el movimiento radial de aproximación y/o el movimiento axial de separación de las parejas de elementos desplazadores (420, 440).
Patentes similares o relacionadas:
DISPOSITIVO DE ENVASADO Y PROCEDIMIENTO PARA EL CONTROL DE UN DISPOSITIVO DE ENVASADO, del 9 de Enero de 2012, de POLY-CLIP SYSTEM GMBH & CO. KG: Dispositivo de envasado, con un dispositivo de llenado para el transporte de un producto de llenado , un tubo de llenado conectado con el dispositivo […]
PROCEDIMIENTO PARA EXTRAER RESIDUOS DE MATERIA CÁRNICA DE COLAS DE EMBUTIDOS RECIÉN GRAPADOS Y DISPOSITIVO PARA LA REALIZACIÓN DEL MISMO, del 22 de Diciembre de 2011, de LORENZO NOGUERA,SAGAR: Procedimiento para extraer residuos de materia cárnica en colas de embutidos grapados, para llevar a cabo en máquinas grapadoras de extremos de embutidos, caracterizado […]
GRAPA DE CIERRE PARA ENVOLTURAS DE FORMA TUBULAR, del 14 de Diciembre de 2011, de TIPPER TIE TECHNOPACK GMBH: Grapa de cierre para cerrar envolturas de forma tubular abrazando para ello sus extremos fruncidos y recogidos, con una curvatura esencialmente […]
COMBINACIÓN DE UN DISPOSITIVO PARA CERRAR UN TUBO FLEXIBLE DE EMBALAJE Y UNA GRAPA DE CIERRE, del 8 de Noviembre de 2011, de TIPPER TIE TECHNOPACK GMBH: Combinación de un dispositivo para cerrar un tubo flexible de embalaje con un canal de alimentación para alimentar grapas de cierre , un punzón […]
 GRAPA DE CIERRE PARA UN TUBO FLEXIBLE DE ENVASE Y DISPOSITIVO PARA LA MANIPULACIÓN DE LA GRAPA DE CIERRE, del 22 de Junio de 2011, de TIPPER TIE TECHNOPACK GMBH: - Grapa de cierre para cerrar un tubo flexible de envase , con dos brazos de grapa y un fondo de grapa dispuesto entre los brazos de […]
GRAPA DE CIERRE PARA UN TUBO FLEXIBLE DE ENVASE Y DISPOSITIVO PARA LA MANIPULACIÓN DE LA GRAPA DE CIERRE, del 22 de Junio de 2011, de TIPPER TIE TECHNOPACK GMBH: - Grapa de cierre para cerrar un tubo flexible de envase , con dos brazos de grapa y un fondo de grapa dispuesto entre los brazos de […]
 ALIMENTADOR DE GRAPAS AJUSTABLE, del 12 de Abril de 2011, de POLY-CLIP SYSTEM GMBH & CO. KG: Dispositivo transportador de grapas para transportar un cordón de grapas compuesto por varias grapas en una máquina de grapar, en particular en una máquina de grapar […]
ALIMENTADOR DE GRAPAS AJUSTABLE, del 12 de Abril de 2011, de POLY-CLIP SYSTEM GMBH & CO. KG: Dispositivo transportador de grapas para transportar un cordón de grapas compuesto por varias grapas en una máquina de grapar, en particular en una máquina de grapar […]
 AJUSTE AUTOMÁTICO DE EXTENSIÓN, del 12 de Enero de 2011, de POLY-CLIP SYSTEM GMBH & CO. KG: Dispositivo para configurar una ristra (Z) sobre un material de funda de envase que recibe un material que se ha de envasar (VH), especialmente una […]
AJUSTE AUTOMÁTICO DE EXTENSIÓN, del 12 de Enero de 2011, de POLY-CLIP SYSTEM GMBH & CO. KG: Dispositivo para configurar una ristra (Z) sobre un material de funda de envase que recibe un material que se ha de envasar (VH), especialmente una […]
 PROCEDIMIENTO Y DISPOSITIVO PARA EL CIERRE CONTROLADO DE AL MENOS UNA PINZA ALREDEDOR DE UN SEGMENTO TRENZADO SIN MATERIAL DE RELLENO DE UNA ENVUELTA EN FORMA DE TUBO FLEXIBLE SOBRE UN SEGMENTO DE MATERIAL DE RELLENO ABRAZADO POR LA ENVUELTA, del 28 de Diciembre de 2010, de POLY-CLIP SYSTEM GMBH & CO. KG: Procedimiento para el cierre controlado de al menos una pinza alrededor de un segmento trenzado sin material de relleno de una envuelta en forma de tubo […]
PROCEDIMIENTO Y DISPOSITIVO PARA EL CIERRE CONTROLADO DE AL MENOS UNA PINZA ALREDEDOR DE UN SEGMENTO TRENZADO SIN MATERIAL DE RELLENO DE UNA ENVUELTA EN FORMA DE TUBO FLEXIBLE SOBRE UN SEGMENTO DE MATERIAL DE RELLENO ABRAZADO POR LA ENVUELTA, del 28 de Diciembre de 2010, de POLY-CLIP SYSTEM GMBH & CO. KG: Procedimiento para el cierre controlado de al menos una pinza alrededor de un segmento trenzado sin material de relleno de una envuelta en forma de tubo […]