ALIMENTADOR DE GRAPAS AJUSTABLE.
Dispositivo transportador de grapas para transportar un cordón de grapas (2) compuesto por varias grapas en una máquina de grapar,
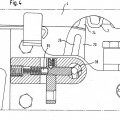
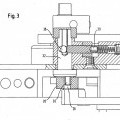
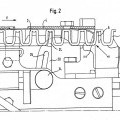
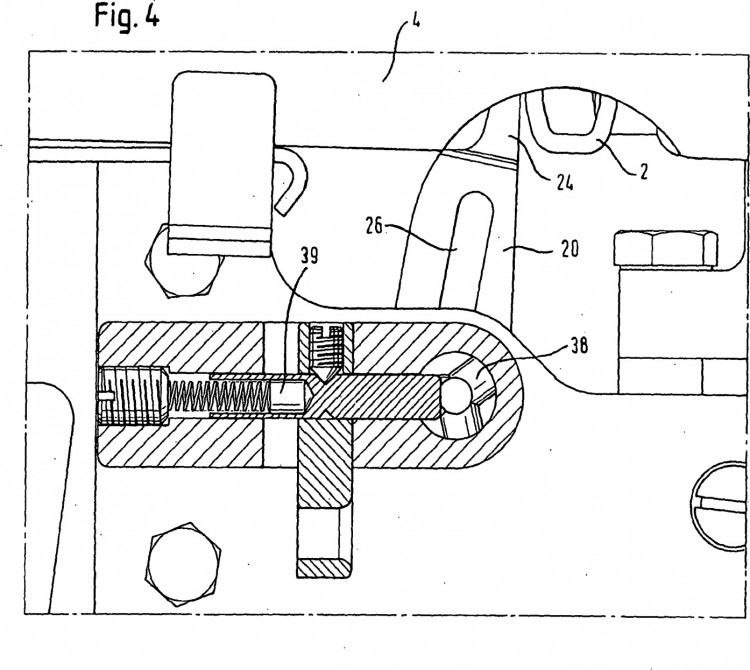
en particular en una máquina de grapar embutidos, con una unidad de accionamiento (10) y un elemento de transporte (20) que por su extremo de accionamiento (22) está acoplado con la unidad de accionamiento (10) y que puede ser accionado por la unidad de accionamiento (10) de tal modo que su extremo transportador (24) describa una trayectoria elíptica, y que para transportar paso a paso el cordón de grapas (2) penetra en espacios intermedios entre dos grapas del cordón de grapas (2), y lo transporta paso a paso en el sentido de avance (V), caracterizado porque está previsto un dispositivo de ajuste (30) con un eje de giro (36), alrededor del cual puede bascular el elemento transportador (20), y cuya posición de emplazamiento se puede ajustar sin necesidad de herramientas de tal modo que se pueda modificar por lo menos uno de los ejes de la trayectoria elíptica descrita por el extremo de transporte (24)
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E08004493.
Solicitante: POLY-CLIP SYSTEM GMBH & CO. KG.
Nacionalidad solicitante: Alemania.
Dirección: WESTERBACHSTRASSE 45 60489 FRANKFURT AM MAIN ALEMANIA.
Inventor/es: EBERT,DETLEF, HUMMEL,MICHAEL.
Fecha de Publicación: .
Fecha Solicitud PCT: 11 de Marzo de 2008.
Clasificación Internacional de Patentes:
- A22C11/12B
Clasificación PCT:
- A22C11/12 NECESIDADES CORRIENTES DE LA VIDA. › A22 CARNICERIA; TRATAMIENTO DE LA CARNE; TRATAMIENTO DE LAS AVES DE CORRAL O DEL PESCADO. › A22C TRATAMIENTO DE LA CARNE, DE LAS AVES DE CORRAL O DEL PESCADO (conservas A23B; producción de composiciones a base de proteínas para la alimentación A23J 1/00; productos alimenticios a base de pescado, carne o aves de corral A23L; trituración, p. ej. picado de la carne B02C 18/00; preparación de proteínas en sí C07K 1/00). › A22C 11/00 Fabricación de embutidos. › Aparatos para anudar las pieles de los embutidos.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
PDF original: ES-2356696_T3.pdf
Fragmento de la descripción:
La invención se refiere a un dispositivo transportador de grapas para transportar un cordón de grapas compuesto por varias grapas en una máquina de grapar, en particular una máquina de grapar embutidos, conforme al preámbulo de la reivindicación 1.
La invención se refiere en particular a un dispositivo transportador de grapas para transportar un cordón de 5 grapas de cierre o clips compuesto por varias grapas de cierre o clips en una máquina de grapar, en particular una máquina de grapar embutidos, presentando el dispositivo alimentador de grapas una unidad de accionamiento y un elemento de avance o transporte. El elemento de avance está acoplado por su extremo de accionamiento con la unidad de accionamiento. Se puede accionar por la unidad de accionamiento de tal modo que su extremo de avance, opuesto al extremo de accionamiento, describa una trayectoria elíptica y penetre en los espacios intermedios entre dos grapas 10 del cordón de grapas para efectuar el avance paso a paso del cordón de grapas, y lo transporte paso a paso en el sentido de avance.
En la práctica es conocido que por ejemplo para la fabricación de embutidos se alimente el picadillo desde una máquina de llenado a través de un tubo de llenado a una máquina de grapar. En la máquina de grapar se carga el picadillo en un material de envoltura de envasado de forma tubular cerrado por el primer extremo del embutido por 15 medio de una primera grapa, y se cierra colocando una segunda grapa en el segundo extremo del embutido. A continuación se separa el material de la envoltura de envasado del embutido producido de este modo de la reserva del restante material de envoltura de envasado y se retira el embutido terminado fuera de la máquina de grapar.
Para la colocación y cierre de la grapa de cierre o del clip, la máquina de grapar dispone por lo general de una primera herramienta de cierre, la matriz, y de una segunda herramienta de cierre, el punzón. Éstas están dispuestas 20 entre la boca de salida del tubo de llenado y el dispositivo de transporte de la máquina de grapar, para retirar los embutidos terminados. La matriz está situada generalmente debajo del trayecto de transporte de los embutidos, y el punzón por encima de este trayecto de transporte. Después de colocar una grapa en la matriz y de colocar una ristra fruncida vacía de producto de llenado en esta grapa, se desplazan las dos herramientas de cierre aproximándolas entre sí de tal modo que comprimen la grapa situada entre ellas y de este modo cierran el material de la envoltura de 25 envasado.
En la máquina de grapar descrita inicialmente se trabaja normalmente con grapas que se fabrican a partir de un cordón de alambre de aluminio troquelado. Para ello las grapas están pre-curvadas en forma de U y están unidas entre sí mediante unos puentes acodados situados en los extremos de sus brazos. El cordón de grapas formado de este modo se alimenta a la matriz por medio de un dispositivo de transporte de grapas a lo largo de una trayectoria de guiado 30 que desemboca en la zona de la correspondiente herramienta de cierre.
Durante el transporte o avance de un cordón de grapas por medio de los dispositivos transportadores de grapas conocidos en la práctica se alimenta la primera de las grapas en forma conocida a la matriz mediante un elemento de avance que penetra entre ellas de modo intermitente. Mientras la primera de las grapas está unida con el cordón de grapas siguiente es mantenida por éste de modo firme en la matriz. Al efectuar el cierre, se conduce 35 primeramente la matriz a su posición de cierre o de fin de carrera. En esta posición se comprime la primera de las grapas contra la ristra de material de envoltura de envasado, quedando tensado entre éste y la matriz.
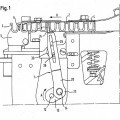
Una máquina de grapar de la clase citada inicialmente se conoce por la Memoria EP 1 736 412. La máquina de grapar que allí se muestra presenta una palanca de cierre con una primera herramienta de cierre, la matriz, que está dispuesta en la palanca de cierre y que se puede bascular junto con ésta. La segunda herramienta de cierre, el punzón, 40 está situado de forma desplazable a lo largo de unos medios de guiado lineales, con relación a la primera herramienta de cierre. Para cerrar las grapas, las herramientas de cierre se pueden desplazar relativamente entre sí entre una posición abierta y una posición de cierre. Un cordón de grapas se conduce a la palanca de cierre a lo largo de una trayectoria de conducción que comienza en las proximidades del eje de cierre de la palanca de cierre, en sentido hacia la matriz. Para el accionamiento de transporte del cordón de grapas está situado en el extremo delantero de la palanca 45 de cierre un medio de transporte, en forma de una palanca con accionamiento excéntrico, que encaja de modo intermitente en el cordón de grapas. El medio de transporte levanta el cordón de grapas por su extremo próximo a la matriz, tira de él en sentido hacia la matriz y coloca así la primera de las grapas del cordón de grapas en la matriz.
De modo desfasado en el tiempo, es decir mientras la matriz permanece todavía en esta posición, el punzón se desplaza hacia la matriz. Inmediatamente antes de efectuar el cierre de la grapa se corta primeramente la primera de las 50 grapas del cordón de grapas siguiente mediante un dispositivo de corte previsto en el punzón. En este momento, la primera de las grapas está libre y solamente es comprimido contra la matriz por la tensión de la ristra. A continuación se deforma el grapa plásticamente mediante una siguiente aproximación del punzón a la matriz, hasta que las herramientas de cierre se hayan aproximado entre sí hasta la altura de grapado, y la grapa queda cerrada alrededor de la ristra tubular. 55
Estos dispositivos conocidos para el transporte de grapas tienen generalmente una carrera de avance fija que está adaptada al tamaño de la grapa. En el caso de que se tenga que trabajar con grapas de otras dimensiones, por
ejemplo al cambiar el calibre de los embutidos, es necesario adaptar la longitud de avance o carrera de avance al nuevo tamaño de grapa.
En los dispositivos de transporte de grapas conocidos por la práctica es además conocido el empleo de una excéntrica para generar el movimiento de avance intermitente. De este modo, al desplazar el punto de giro del elemento de avance se puede conseguir una modificación de la carrera de avance o de la longitud de avance. Dado que 5 generalmente el punto de giro del elemento de avance va fijado en el apoyo de la matriz o en el soporte de la matriz, hay que cambiar ésta completamente si se quiere trabajar con otro tamaño de grapa. Pero esto exige el empleo de herramientas y desarmar al menos parcialmente la máquina de grapar. Esto consume tiempo y por lo tanto supone costes.
Los dispositivos de transporte de grapas conocidos por la práctica presentan otro inconveniente. Durante un 10 período de tiempo entre el corte de la grapa que se encuentra en la matriz y la nueva penetración del elemento de avance en el siguiente hueco entre dos grapas, el cordón de grapas no está detenido en el sentido de avance entre dos grapas del cordón de grapas. Si el cordón de grapas se encuentra sometido a una tensión de tracción debido al movimiento de avance, puede ser retirado en sentido contrario al de avance al cortar la primera de las grapas del cordón de grapas en la zona de penetración del elemento de avance, lo que dificulta o impide el acoplamiento deseado. 15
El objetivo de la presente invención es proporcionar un dispositivo de transporte de grapas para transportar un cordón de grapas compuesto por varias grapas en una máquina de grapar de la clase citada inicialmente, que sea de construcción sencilla y permita ajustar de modo sencillo la longitud de avance o carrera de avance del cordón de grapas.
El presente objetivo se resuelve por medio de las características de la reivindicación 1. En las subsiguientes reivindicaciones 2 a 10 se encuentran configuraciones ventajosas al respecto. 20
Para resolver el objetivo se propone conforme a la invención un dispositivo de transporte de grapas para transportar un cordón de grapas compuesto por varias grapas en una máquina de grapar, en particular una máquina de grapar embutidos, que presenta una unidad de accionamiento y un elemento de avance que está acoplado con la unidad de accionamiento por su extremo de accionamiento y que se puede accionar por la unidad de accionamiento de tal modo que su extremo de avance describa una trayectoria elíptica, y que para transportar paso a paso el cordón de 25 grapas... [Seguir leyendo]
Reivindicaciones:
1. Dispositivo transportador de grapas para transportar un cordón de grapas (2) compuesto por varias grapas en una máquina de grapar, en particular en una máquina de grapar embutidos, con una unidad de accionamiento (10) y un elemento de transporte (20) que por su extremo de accionamiento (22) está acoplado con la unidad de accionamiento (10) y que puede ser accionado por la unidad de accionamiento (10) de tal modo que su 5 extremo transportador (24) describa una trayectoria elíptica, y que para transportar paso a paso el cordón de grapas (2) penetra en espacios intermedios entre dos grapas del cordón de grapas (2), y lo transporta paso a paso en el sentido de avance (V),
caracterizado porque está previsto un dispositivo de ajuste (30) con un eje de giro (36), alrededor del cual puede bascular el elemento transportador (20), y cuya posición de emplazamiento se puede ajustar sin 10 necesidad de herramientas de tal modo que se pueda modificar por lo menos uno de los ejes de la trayectoria elíptica descrita por el extremo de transporte (24).
2. Dispositivo de transporte de grapas según la reivindicación 1, caracterizado porque la posición de emplazamiento del eje de giro (36) del dispositivo de ajuste (30) se puede ajustar por medio de una excéntrica.
3. Dispositivo de transporte de grapas según la reivindicación 1, caracterizado porque la posición de 15 emplazamiento del eje de giro (36) del dispositivo de ajuste (30) se puede ajustar por medio de una guía lineal.
4. Dispositivo de transporte de grapas según una de las reivindicaciones 1 a 3, caracterizado porque la posición de emplazamiento del eje de giro (36) del dispositivo de ajuste (30) se puede ajustar desde el exterior por medio de un elemento de ajuste (34).
5. Dispositivo de transporte de grapas según una de las reivindicaciones 1 a 4, caracterizado porque el eje de 20 giro (36) del dispositivo de ajuste (30) penetra en un agujero rasgado (26) del elemento de transporte (20).
6. Dispositivo de transporte de grapas según una de las reivindicaciones 1 a 5, caracterizado porque la unidad de accionamiento (10) comprende por lo menos una excéntrica.
7. Dispositivo de transporte de grapas según una de las reivindicaciones 1 a 6, caracterizado porque la unidad de accionamiento (10) gira alrededor de un eje fijo (12). 25
8. Dispositivo de transporte de grapas según una de las reivindicaciones 1 a 7, caracterizado porque el eje (12) de la unidad de accionamiento (10) se puede ajustar de tal modo que se pueda modificar por lo menos uno de los ejes de la trayectoria elíptica descrita por el extremo de transporte (24) del elemento de transporte (20).
9. Dispositivo de transporte de grapas según una de las reivindicaciones 1 a 8, caracterizado por estar previsto un dispositivo de retención (40) de acción automática, que se puede acoplar con una grapa (3) situada en el 30 extremo anterior del cordón de grapas (2).
10. Dispositivo de transporte de grapas según la reivindicación 9, caracterizado porque el dispositivo de retención (40) está formado por una escotadura (5b) prevista en una matriz (5) y por un medio de aplicación de una fuerza que aplica sobre el cordón de grapas una fuerza de presión que actúa esencialmente en dirección perpendicular a la dirección de avance (V). 35
Patentes similares o relacionadas:
DISPOSITIVO DE ENVASADO Y PROCEDIMIENTO PARA EL CONTROL DE UN DISPOSITIVO DE ENVASADO, del 9 de Enero de 2012, de POLY-CLIP SYSTEM GMBH & CO. KG: Dispositivo de envasado, con un dispositivo de llenado para el transporte de un producto de llenado , un tubo de llenado conectado con el dispositivo […]
PROCEDIMIENTO PARA EXTRAER RESIDUOS DE MATERIA CÁRNICA DE COLAS DE EMBUTIDOS RECIÉN GRAPADOS Y DISPOSITIVO PARA LA REALIZACIÓN DEL MISMO, del 22 de Diciembre de 2011, de LORENZO NOGUERA,SAGAR: Procedimiento para extraer residuos de materia cárnica en colas de embutidos grapados, para llevar a cabo en máquinas grapadoras de extremos de embutidos, caracterizado […]
GRAPA DE CIERRE PARA ENVOLTURAS DE FORMA TUBULAR, del 14 de Diciembre de 2011, de TIPPER TIE TECHNOPACK GMBH: Grapa de cierre para cerrar envolturas de forma tubular abrazando para ello sus extremos fruncidos y recogidos, con una curvatura esencialmente […]
COMBINACIÓN DE UN DISPOSITIVO PARA CERRAR UN TUBO FLEXIBLE DE EMBALAJE Y UNA GRAPA DE CIERRE, del 8 de Noviembre de 2011, de TIPPER TIE TECHNOPACK GMBH: Combinación de un dispositivo para cerrar un tubo flexible de embalaje con un canal de alimentación para alimentar grapas de cierre , un punzón […]
 GRAPA DE CIERRE PARA UN TUBO FLEXIBLE DE ENVASE Y DISPOSITIVO PARA LA MANIPULACIÓN DE LA GRAPA DE CIERRE, del 22 de Junio de 2011, de TIPPER TIE TECHNOPACK GMBH: - Grapa de cierre para cerrar un tubo flexible de envase , con dos brazos de grapa y un fondo de grapa dispuesto entre los brazos de […]
GRAPA DE CIERRE PARA UN TUBO FLEXIBLE DE ENVASE Y DISPOSITIVO PARA LA MANIPULACIÓN DE LA GRAPA DE CIERRE, del 22 de Junio de 2011, de TIPPER TIE TECHNOPACK GMBH: - Grapa de cierre para cerrar un tubo flexible de envase , con dos brazos de grapa y un fondo de grapa dispuesto entre los brazos de […]
 AJUSTE AUTOMÁTICO DE EXTENSIÓN, del 12 de Enero de 2011, de POLY-CLIP SYSTEM GMBH & CO. KG: Dispositivo para configurar una ristra (Z) sobre un material de funda de envase que recibe un material que se ha de envasar (VH), especialmente una […]
AJUSTE AUTOMÁTICO DE EXTENSIÓN, del 12 de Enero de 2011, de POLY-CLIP SYSTEM GMBH & CO. KG: Dispositivo para configurar una ristra (Z) sobre un material de funda de envase que recibe un material que se ha de envasar (VH), especialmente una […]
 PROCEDIMIENTO Y DISPOSITIVO PARA EL CIERRE CONTROLADO DE AL MENOS UNA PINZA ALREDEDOR DE UN SEGMENTO TRENZADO SIN MATERIAL DE RELLENO DE UNA ENVUELTA EN FORMA DE TUBO FLEXIBLE SOBRE UN SEGMENTO DE MATERIAL DE RELLENO ABRAZADO POR LA ENVUELTA, del 28 de Diciembre de 2010, de POLY-CLIP SYSTEM GMBH & CO. KG: Procedimiento para el cierre controlado de al menos una pinza alrededor de un segmento trenzado sin material de relleno de una envuelta en forma de tubo […]
PROCEDIMIENTO Y DISPOSITIVO PARA EL CIERRE CONTROLADO DE AL MENOS UNA PINZA ALREDEDOR DE UN SEGMENTO TRENZADO SIN MATERIAL DE RELLENO DE UNA ENVUELTA EN FORMA DE TUBO FLEXIBLE SOBRE UN SEGMENTO DE MATERIAL DE RELLENO ABRAZADO POR LA ENVUELTA, del 28 de Diciembre de 2010, de POLY-CLIP SYSTEM GMBH & CO. KG: Procedimiento para el cierre controlado de al menos una pinza alrededor de un segmento trenzado sin material de relleno de una envuelta en forma de tubo […]
Carga perfeccionada para máquinas atadoras, nudo y módulo preparatorio de cordel para máquinas atadoras, del 28 de Mayo de 2020, de LORENZO NOGUERA,SAGAR: 1. Carga perfeccionada para máquinas atadoras, aplicable en máquinas atadoras de envases o tripas de embutidos, que comprende un soporte formado por […]