PROCEDIMIENTO PARA LA DETECCION DE DERRAPE PARA EL CONTROL DE FAROS CON FUNCION DE LUZ DE CURVAS Y SISTEMA DE DETECCION DE DERRAPE.
Procedimiento para la detección de derrape para el control de los faros (1,
2), caracterizado porque se basa en la valoración de la comparación de la diferencia de velocidad entre las ruedas izquierdas (8, 11) o las derechas (9, 10)
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E07466011.
Solicitante: SKODA AUTO A.S..
Nacionalidad solicitante: República Checa.
Dirección: VACLAVA KLEMENTA 869,293 60 MLADA BOLESLAV.
Inventor/es: SVADOVA,MARTINA, VANIK,FRANTISEK.
Fecha de Publicación: .
Fecha Solicitud PCT: 7 de Mayo de 2007.
Fecha Concesión Europea: 10 de Marzo de 2010.
Clasificación Internacional de Patentes:
- B60Q1/12 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B60 VEHICULOS EN GENERAL. › B60Q DISPOSICION DE DISPOSITIVOS DE SEÑALIZACION O ILUMINACION, SU MONTAJE O SOPORTE, SUS CIRCUITOS, PARA VEHICULOS EN GENERAL. › B60Q 1/00 Disposición de dispositivos de señalización óptica o de iluminación, su montaje, su soporte o los circuitos a este efecto (para la iluminación del interior del vehículo B60Q 3/00). › según la orientación de la dirección.
Clasificación PCT:
- B60Q1/12 B60Q 1/00 […] › según la orientación de la dirección.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
Descripción:
Procedimiento para la detección de derrape para el control de faros con función de luz de curvas y sistema de detección de derrape.
Campo de la técnica
La invención se refiere al procedimiento para la detección de derrape para el control de faros con función de luz de curvas y al sistema de detección de derrape.
Estado anterior de la técnica
Los vehículos terrestres modernos, en particular automóviles, pueden ser equipados hoy en día ya con faros delanteros con iluminación dinámica de curvas, que en función de la velocidad instantánea y del ángulo de giro del volante se ajustan a una posición óptima para una mejor iluminación de la calzada. Al derrapar es deseable que los faros sean orientados a la posición neutral, que consiste en la desviación horizontal nula respecto al eje de movimiento del vehículo. El motivo es evitar la desviación de los faros en una dirección indeseada, o respectivamente la oscilación de los faros, para que la atención del conductor no sea afectada de este modo.
Cuando se aplica el programa electrónico de estabilidad ESP (del inglés "Electronic Stability Program"), este sistema dispone de sensores que miden la aceleración transversal en el centro de gravedad del vehículo. En caso de que la aceleración transversal supere el límite fijado, el par de giro del motor es desacoplado y los frenos de las ruedas son activados. Estos sensores sirven también como fuente de informaciones para el equipo de control del módulo de desviación de faros, que orienta los faros a la posición neutral en caso de derrape. La desventaja es que la mayoría de los vehículos terrestres, en particular automóviles, no están equipados con el sistema ESP. A partir de la solicitud de patente de los EE.UU. US 2002/0039296 A1 es conocido un procedimiento para la detección de derrape, en el que se emplean la diferencia de velocidad entre la rueda delantera izquierda y la rueda delantera derecha y también un ángulo de dirección para la detección de derrape.
La desventaja de esta solución consiste en que cuando se emplea como señal de entrada la diferencia de velocidad entre la rueda izquierda y la derecha, también hay que introducir un ángulo de giro del volante en el algoritmo de control.
Fundamento de la invención
Constituye por ello la tarea de la invención poner a disposición un procedimiento sencillo y rápido, con el que pueda detectarse también para vehículos sin sistema ESP un derrape con el fin de la desviación de los faros. Casi toda la producción de vehículos terrestres, en particular automóviles, está equipada con el sistema antibloqueo ABS (del alemán "AntiBlockierSystem") o al menos con el sistema ASR (del inglés "Anti Slip Regulation", regulación antideslizamiento), que evita el deslizamiento de las ruedas al arrancar. Forman parte de los sistemas ABS y ASR en particular sensores de velocidad en todas las ruedas. Éstos son utilizados por la solución técnica según la presente invención. Un elemento esencial de la presente invención referente al procedimiento para la detección de derrape del control de los faros con función de luz de curvas y del sistema de detección de derrape es un algoritmo que está implementado en el equipo de control de los faros con función de luz de curvas. El algoritmo asegura que los faros sean puestos en la posición neutral al detectarse el derrape sobre la base de las informaciones de velocidad de ruedas individuales y mientras dure el derrape no sean desviados en función de la velocidad del vehículo y del ángulo de giro del volante. Con el fin de la desviación de los faros no es necesaria una detección muy precisa de la situación en la que se encuentra el vehículo en derrape. Una detección a grandes rasgos del derrape sobre la base de informaciones acerca de las velocidades de todas las 4 ruedas es absolutamente suficiente para este fin. Como valores de entrada se emplean las diferencias de velocidad entre ambas ruedas a un lado del vehículo, es decir la diferencia de velocidad entre la rueda delantera izquierda y la rueda trasera izquierda o respectivamente la diferencia entre la rueda delantera derecha y la rueda trasera derecha.
La ventaja de esta solución es el hecho de que no es necesario ningún equipamiento costoso con el sistema ESP, son suficientes también los sistemas ABS ó ASR, más baratos.
Aspectos generales de las figuras en el dibujo
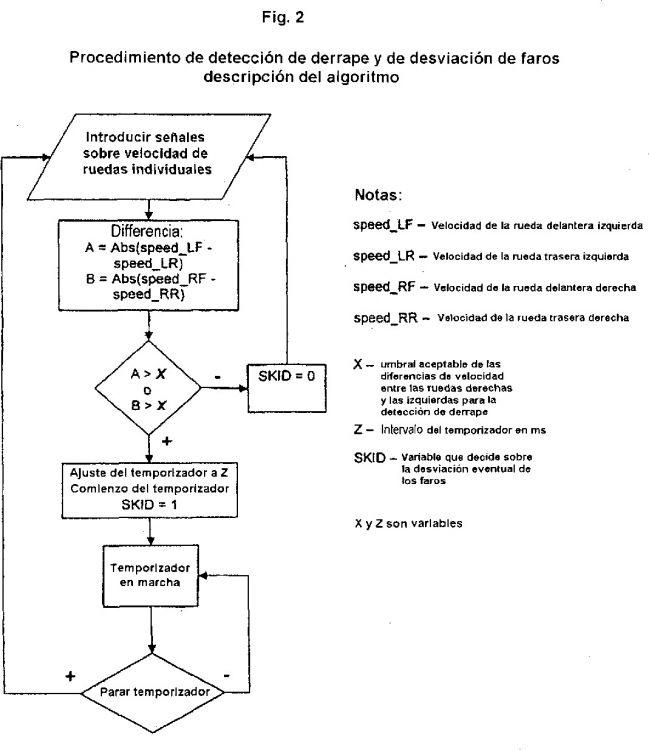
La invención es explicada más detalladamente mediante dibujos esquemáticos, en los cuales la figura 1 representa el diagrama de flujo del sistema de detección de derrape y la desviación de los faros y la figura 2 representa el procedimiento para la detección de derrape y la desviación de los faros mediante el diagrama de flujo del algo-ritmo.
Ejemplos de realización de la invención
El sistema de detección de derrape consta de los sensores de velocidad de ruedas individuales (8, 9, 10, 11), que son las magnitudes de entrada para el equipo de control AFS (6) (del inglés "Adaptive Front-lighting System", sistema adaptativo de luces frontales) que contiene el algoritmo (7) que hace posible la detección de derrape del vehículo. Mediante el módulo de control de desviación de faros (5), estos faros (1, 2) son ajustados a la posición óptima para una mejor iluminación en la curva. El ajuste de los faros (1, 2) se asegura mediante motores paso a paso (3, 4).
El procedimiento de detección de derrape para el control de los faros (1, 2) de vehículos terrestres, en particular automóviles, y el sistema de detección de derrape se basa en la valoración de la comparación de la diferencia de velocidad entre las ruedas izquierdas (8, 11) y las derechas (9, 10).
En caso de que la diferencia de velocidad entre la rueda delantera izquierda (8) y la rueda trasera izquierda (11) sea mayor que X o la diferencia entre la rueda delantera derecha (9) y la rueda trasera derecha (10) sea mayor que X, entonces SKID=1 (vehículo en derrape, los faros no son desviados y son orientados en posición horizontal con desviación nula respecto al eje de movimiento del vehículo). El temporizador está ajustado al valor Z (en ms). La variable Z significa una desviación temporal, que excluye la supresión de la oscilación de faros, en caso de que varíe el resultado de la detección de derrape. Si el temporizador se para, se comprueba nuevamente si el vehículo se encuentra en derrape, y en caso negativo, se tiene SKID=0 (los faros empiezan a desviarse nuevamente en función de la velocidad del vehículo y del ángulo de giro del volante.
Reivindicaciones:
1. Procedimiento para la detección de derrape para el control de los faros (1, 2), caracterizado porque se basa en la valoración de la comparación de la diferencia de velocidad entre las ruedas izquierdas (8, 11) o las derechas (9, 10).
2. Procedimiento según la reivindicación 1, caracterizado porque en caso de que la diferencia de velocidad entre las ruedas izquierdas (8, 11) sea mayor que X o la diferencia entre las ruedas derechas (9, 10) sea mayor que X, los faros (1, 2) son orientados en posición horizontal con desviación nula respecto al eje de movimiento del vehículo.
3. Procedimiento según la reivindicación 1, caracterizado porque en caso de que la diferencia de velocidad entre las ruedas izquierdas (8, 11) sea menor que X y al mismo tiempo la diferencia entre las ruedas derechas (9, 10) sea menor que X, los faros (1, 2) son ajustados a una posición óptima mediante desviación respecto al eje horizontal de movimiento del vehículo sobre la base de la velocidad instantánea del vehículo y el ángulo de giro del volante.
4. Procedimiento según las reivindicaciones 1 hasta 3, caracterizado porque el valor X es una variable - el umbral aceptable de las diferencias de velocidad entre las ruedas derechas (9, 10) y las izquierdas (8, 11) para la detección de derrape.
5. Procedimiento según las reivindicaciones 1 hasta 4, caracterizado porque la comprobación de si el vehículo se encuentra en derrape se produce una vez transcurrida la variable Z - retardo (en ms).
6. Sistema de detección de derrape que consta de un equipo de control AFS (6), cuyas magnitudes de entrada proceden de sensores de velocidad de ruedas individuales (8, 9, 10, 11), el cual contiene un algoritmo (7), que hace posible la detección de derrape del vehículo, en que los faros (1, 2) son desviados por el módulo de desviación de faros (5) a una posición óptima, caracterizado porque el algoritmo lleva a cabo un procedimiento según una de las reivindicaciones 1 hasta 5.
7. Sistema de detección de derrape según la reivindicación 6, caracterizado porque la desviación de los faros (1, 2) es asegurada mediante motores paso a paso (3, 4).
Patentes similares o relacionadas:
Unidad de luz para uso en vehículo que se inclina al virar, método para ajustarla, vehículo que se inclina al virar, y método para ajustarlo, del 8 de Mayo de 2019, de YAMAHA HATSUDOKI KABUSHIKI KAISHA: Vehículo con una unidad de luz , el vehículo puede inclinarse al virar mientras el vehículo está circulando, incluyendo la unidad de […]
Unidad de faro secundario y sistema de faro secundario para uso en un vehículo que se inclina al virar, y vehículo que se inclina al virar, y método para controlar una unidad de faro secundario para uso en un vehículo que se inclina al virar, del 20 de Junio de 2018, de YAMAHA HATSUDOKI KABUSHIKI KAISHA: Un vehículo que se inclina al virar, incluyendo el vehículo una fuente de luz de faro principal y un sistema de faro secundario para uso […]
Unidad de faro secundario y sistema de faro secundario para uso en un vehículo que se inclina al virar, y vehículo que se inclina al virar, y método para controlar la emisión de luz de una unidad de faro secundario, del 3 de Mayo de 2017, de YAMAHA HATSUDOKI KABUSHIKI KAISHA: Un vehículo que se inclina al virar, incluyendo el vehículo un faro principal , y una unidad de faro secundario (13L, 13R) que es diferente del faro principal […]
Unidad de faro secundario y sistema de faro secundario para uso en un vehículo que se inclina al virar, y vehículo que se inclina al virar, y método para controlar una unidad de faro secundario, del 5 de Abril de 2017, de YAMAHA HATSUDOKI KABUSHIKI KAISHA: Una unidad de faro secundario (13L, 13R) para uso en un vehículo que se inclina al virar, donde la unidad de faro secundario (13L, 13R) incluye al menos una fuente de luz de […]
Dispositivo de iluminación con lente móvil para vehículo automóvil, del 23 de Noviembre de 2016, de PSA Automobiles SA: Dispositivo de iluminación para vehículo automóvil , que comprende: - un chasis ; - una óptica que comprende una montura y una lente […]
 Sistema de faros y vehículo del tipo de montar a horcajadas, del 30 de Marzo de 2016, de YAMAHA HATSUDOKI KABUSHIKI KAISHA: Sistema de faros para instalarse en un vehículo del tipo de montar a horcajadas, que comprende:
una unidad de faros que pueda funcionar en el modo de […]
Sistema de faros y vehículo del tipo de montar a horcajadas, del 30 de Marzo de 2016, de YAMAHA HATSUDOKI KABUSHIKI KAISHA: Sistema de faros para instalarse en un vehículo del tipo de montar a horcajadas, que comprende:
una unidad de faros que pueda funcionar en el modo de […]
 MÉTODO Y DISPOSITIVO ELECTROMECÁNICO DE ESTABILIZACIÓN DE LA ILUMINACIÓN DELANTERA DE UNA MOTOCICLETA, del 12 de Noviembre de 2015, de SÁEZ LÓPEZ, Rubén: Método y dispositivo electromecánico para la estabilización de la iluminación delantera de una motocicleta con un dispositivo iluminador […]
MÉTODO Y DISPOSITIVO ELECTROMECÁNICO DE ESTABILIZACIÓN DE LA ILUMINACIÓN DELANTERA DE UNA MOTOCICLETA, del 12 de Noviembre de 2015, de SÁEZ LÓPEZ, Rubén: Método y dispositivo electromecánico para la estabilización de la iluminación delantera de una motocicleta con un dispositivo iluminador […]
Sistema de regulación de los faros en un vehículo basculante con mecanismo de balanceo, del 11 de Junio de 2014, de PIAGGIO & C. S.P.A.: Un sistema de regulación de uno o más soportes de las cúpulas (26', 28') de los faros de un vehículo que tiene un chasis , una rueda […]