PROCEDIMIENTO PARA ESTIMAR LA VELOCIDAD DE GIRO DEL ROTOR DE UNA MAQUINA DE INDUCCION TRIFASICA.
Procedimiento para estimar la velocidad de giro del rotor de una máquina de inducción trifásica partiendo de las medidas de corriente y tensión de dos de las fases de alimentación y de los parámetros de la máquina (resistencias,
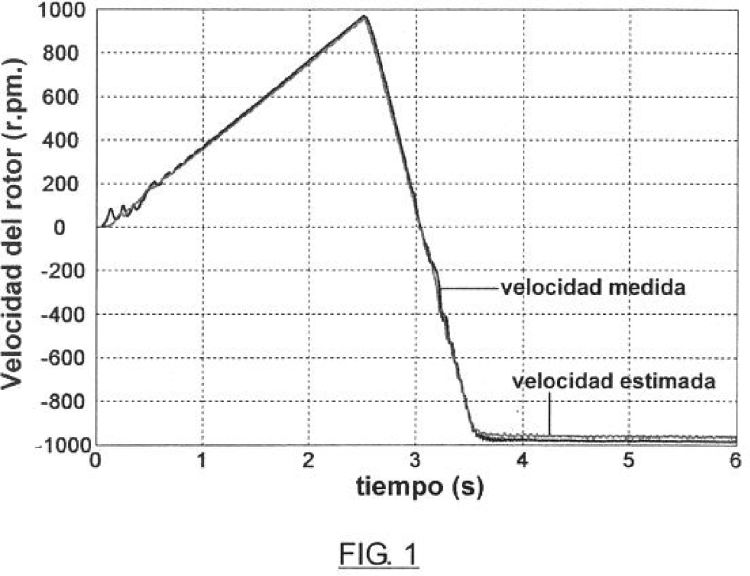
inductancias, etc). Con esta información se calculan las componentes x,y de los fasores espaciales tensión del estator, y corriente de magnetización del estator; referidos al sistema de referencia fijo. Con estas componentes se obtienen dos ecuaciones similares para el cálculo de la velocidad del rotor (velocidadA y velocidadB). Para resolver el problema derivado del cálculo de la ecuación de la velocidad cuando el denominador se hace cero; se aprovecha la propiedad de que los denominadores de las expresiones velocidadA y velocidadB se anulan con una diferencia de fase de 90º. El cálculo de la velocidad se realiza con aquella ecuación cuyo denominador se encuentre más alejado de cero en cada instante
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P200900190.
Solicitante: UNIVERSIDAD POLITECNICA DE MADRID.
Nacionalidad solicitante: España.
Provincia: MADRID.
Inventor/es: VEGA GONZALEZ,CARLOS MARIO, RODRIGUEZ ARRIBAS,JAIME, RAMIREZ PRIETO,DIONISIO.
Fecha de Solicitud: 23 de Enero de 2009.
Fecha de Publicación: .
Fecha de Concesión: 1 de Febrero de 2010.
Clasificación Internacional de Patentes:
- H02P21/14S
Clasificación PCT:
- H02P21/14 ELECTRICIDAD. › H02 PRODUCCION, CONVERSION O DISTRIBUCION DE LA ENERGIA ELECTRICA. › H02P CONTROL O REGULACION DE MOTORES ELÉCTRICOS, GENERADORES ELECTRICOS O CONVERTIDORES DINAMOELECTRICOS; CONTROL DE TRANSFORMADORES, REACTANCIAS O BOBINAS DE CHOQUE. › H02P 21/00 Disposiciones o métodos de control de máquinas eléctricas mediante control por vector, p. ej., por control de la orientación del campo. › Estimación o adaptación de parámetros de la máquina, p. ej., flujo, corriente o voltaje.
Fragmento de la descripción:
Procedimiento para estimar la velocidad de giro del rotor de una máquina de inducción trifásica.
Sector técnico
La invención se encuadra dentro del sector técnico de control de accionamientos eléctricos, más concretamente en el de control de máquinas eléctricas trifásicas de inducción sin sensor de medida directa de velocidad (sensorless). La aplicación industrial recomendada es la del cálculo de la velocidad del rotor en una máquina de inducción trifásica perteneciente a cualquier tipo de accionamiento controlado por microprocesador. Especialmente en aquellas aplicaciones en las que sea admisible un error de estimación de velocidad de alrededor del 1% y preferiblemente en aplicaciones donde se empleen velocidades medias y altas.
Antecedentes de la invención
En los sistemas de regulación de velocidad de motores se emplea dentro del lazo de control un sensor físico para la medida directa de la misma. Estos sensores presentan varios inconvenientes como son el coste, la necesidad de mantenimiento y la poca fiabilidad en ambientes industriales difíciles lo que hace que muchos fabricantes consideren la posibilidad de su sustitución por otro sistema de medida ya que siempre es necesario conocer el valor de la velocidad al ser ésta una de las principales variables de control. En ocasiones, además no existe un espacio físico donde colocar el sensor (por ejemplo en bombas sumergidas).
En los últimos años se han propuesto numerosas estrategias para la estimación de posición y velocidad en máquinas eléctricas. Incluso algunas de estas estrategias han sido implementadas en productos comerciales que están siendo usados en la industria, en aplicaciones en donde no es necesaria la operación continua a velocidades cercanas a la velocidad cero.
En Holtz, J. "Methods for Speed Sensorless Control of AC Drives" Sensorless Control of AC Motors. IEEE Press Book, 1996, Holtz, J. "Sensorless Speed and Position Control of Induction Motors" Tutorial IEEE Ind. Elect. IECON, 2001. Denver/Co, Nov. 2001, y en Vas, P. "Sensorless Vector and Direct Torque Control" Oxford University Press, 1998, se hace un resumen compendio de los diferentes métodos que se utilizan para la estimación de la velocidad y otros parámetros en un motor de inducción. Estos métodos resultan complejos, de difícil aplicación práctica o, en los casos en los que son sencillos presenta importantes limitaciones en su aplicación.
Entre las estrategias más extendidas podemos citar los métodos basados en el modelo fundamental, que estiman la posición o la velocidad a partir de las ecuaciones dinámicas de la máquina. Estos observadores pueden ser de orden completo o reducido, con o sin realimentación del error de estimación.
Las técnicas citadas anteriormente se basan en el modelo d-q de la máquina, y obtienen la información a partir de la fuerza electromotriz o enlaces de flujo. Debido a esto, a bajas velocidades las señales de estimación son pequeñas y se ven afectadas tanto por el ruido de medición como por la desviación de los parámetros del motor. Incluso teóricamente, utilizando estas estrategias, no es posible obtener información de la posición del rotor a velocidad cero.
En máquinas de inducción, el esquema más extendido es el MRAS (Model Referente Adaptive System), que hace uso de dos modelos, uno de ellos dependiente de la velocidad, comparando los resultados de ambos para obtener la señal de error.
También se utilizan esquemas basados en el filtro Kalman: KF (Kalman Filter), EKF(Extended Kalman Filter), etc; aunque son más complejos que el MRAS y son sensibles a las variaciones de parámetros.
Los casos hasta ahora mencionados pertenecen al tipo de estimadores en cadena abierta (Open-Loop Observers), que son sensibles a las variaciones de parámetros y al ruido. Los estimadores con realimentación (Close-Loop Observers) abarcan los observadores "Full Order Nonlinear" y "Sliding Mode".
El observador adaptativo "Sliding Mode" permite trabajar a muy bajas velocidades (3 rev/min, 0,002 p.u.), siendo el valor más bajo alcanzable con los métodos sin inyección de señal.
Existen varias propuestas para la estimación de posición a bajas velocidades. Éstas obtienen información sobre la posición del rotor a partir de las irregularidades que afectan tos parámetros de la máquina, en función de la posición del rotor. Las irregularidades pueden ser inherentes a la máquina utilizada, debidas a las características constructivas de la misma, o realizadas expresamente con la intención de generar o evidenciar una señal de corriente o tensión que permita la estimación de la posición.
La estimación de posición/velocidad por este método es en general más sencilla en las máquinas síncronas, ya que éstas tienen de forma natural salientes o asimetrías.
Las irregularidades que afectan los parámetros de la máquina con la posición del rotor son, entre otras: la distribución espacial discreta de bobinados, barras o imanes; las variaciones de entrehierro (debido a las ranuras, polos y excentricidades) o las propiedades del material utilizado y características de laminación (saturación magnética, histéresis y corrientes parásitas).
Para obtener la información de la posición del rotor a partir de las irregularidades han sido propuestos diferentes métodos. Éstos, en la mayoría de los casos, consisten en aplicar una determinada excitación de exploración, además de la excitación fundamental que genera el par motor, que permite obtener una señal de corriente, o tensión, conteniendo la información de la posición del rotor. En algunos casos, esta señal de exploración es una corriente o tensión trifásica equilibrada, de alta frecuencia, que se inyecta sobre la excitación fundamental de la máquina. En otros casos, son pulsos de tensión discretos, generados por el inversor que alimenta a la máquina, mientras se cancela la excitación fundamental.
La inyección de una señal de alta frecuencia, consiste en aplicar una señal de tensión o corriente, a una frecuencia mucho mayor que la excitación fundamental de la máquina (0.5-1 kHz). Esta señal puede tomar varias formas, pero las más comunes son la excitación trifásica equilibrada y la excitación de amplitud modulada. La excitación trifásica equilibrada genera un vector de excitación que gira a la frecuencia de la señal inyectada. La excitación de amplitud modulada genera un vector de excitación que es estacionario o gira lentamente y su amplitud varía a alta frecuencia. En ambos casos, la señal de excitación induce corrientes o tensiones que contienen información relativa a la posición de las irregularidades en la máquina.
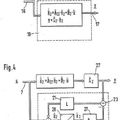
Los estimadores se implementan generalmente utilizando electrónica de control basada en microprocesadores. El procedimiento objeto de la invención consiste también en un algoritmo programable en un microprocesador, para la estimación de la velocidad del rotor de una máquina de inducción trifásica a partir de la medida de las corrientes y las tensiones en el estator que permite eliminar el sensor de velocidad físico, sustituyéndolo.
Las ventajas del procedimiento objeto de la invención son, además de la eliminación de la necesidad de contar con un sensor físico de velocidad del rotor, su correcto comportamiento incluso frente a variaciones importantes de los parámetros físicos de la máquina como los debidos a variaciones de temperatura y envejecimiento y que su procesamiento requiere un reducido número de líneas de programa que no suponen un aumento significativo respecto del empleado en procesar en un microprocesador el algoritmo de control del accionamiento. Además su funcionamiento es correcto tanto con velocidades elevadas como con velocidades intermedias o reducidas.
Otras ventajas son la eliminación del cable que conecta el sensor, una mejor inmunidad al ruido electromagnético, mayor fiabilidad, menores requisitos de mantenimiento y funcionamiento adecuado en ambientes industriales hostiles.
Respecto de otros estimadores sus principales ventajas son su sencillez de computación y su exactitud en un amplio margen de velocidades.
Descripción de la invención
La invención se refiere a un procedimiento para estimar la velocidad de giro del rotor de una máquina de inducción trifásica de acuerdo con la reivindicación 1. Realizaciones preferidas se definen en las reivindicaciones dependientes.
El procedimiento comprende:
- medir dos corrientes de alimentación de la máquina;
-...
Reivindicaciones:
1. Procedimiento para estimar la velocidad de giro del rotor de una máquina de inducción trifásica, caracterizado porque comprende:
- medir dos corrientes de alimentación de la máquina;
- medir dos tensiones de línea de la alimentación de la máquina;
- calcular las componentes (usx, usy) del fasor espacial tensión del estator
- calcular las componentes (isx, isy) del fasor espacial corriente del estator
- calcular las componentes (ismx, ismy) del fasor espacial corriente de magnetización del estator
- obtener el valor de dos denominadores (denominador A, denominador B), según la siguiente fórmula:
donde:
L es la inductancia magnetizante;
Ls = Ls s + L, es la inductancia de estator;
Lr = L's r + L, es la inductancia de rotor referida a estator;
- obtener la velocidad estimada west de giro del rotor de la máquina de la siguiente forma:



Rs es la resistencia de una fase de estator;
R'r es la resistencia de una fase de rotor referida a estator.
2. Procedimiento para estimar la velocidad de giro del rotor de una máquina de inducción trifásica según la reivindicación anterior, caracterizado porque las componentes (ismx, ismy) del fasor espacial corriente de magnetización del estator
3. Procedimiento para estimar la velocidad de giro del rotor de una máquina de inducción trifásica según cualquiera de las reivindicaciones anteriores, caracterizado porque las componentes (isx, isy) del fasor espacial corriente del estator
donde ia, ib, ic son las corrientes de alimentación de la máquina de inducción trifásica.
4. Procedimiento para estimar la velocidad de giro del rotor de una máquina de inducción trifásica según cualquiera de las reivindicaciones anteriores, caracterizado porque las componentes (usx, usy) del fasor espacial tensión del estator
donde ua es la tensión fase-neutro de la fase a y ubc es una tensión de línea de la alimentación de la máquina.
5. Procedimiento para estimar la velocidad de giro del rotor de una máquina de inducción trifásica según cualquiera de las reivindicaciones anteriores, caracterizado porque dicho procedimiento se ejecuta en el procesador digital de señales (DSP) utilizado para procesar el algoritmo de control de la máquina de inducción trifásica.
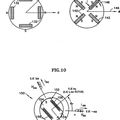
6. Procedimiento para estimar la velocidad de giro del rotor de una máquina de inducción trifásica según cualquiera de las reivindicaciones anteriores, caracterizado porque las medidas de las dos corrientes de alimentación de la máquina se obtienen utilizando dos sensores de efecto Hall conectados cada uno de ellos en una fase diferente del estator.
Patentes similares o relacionadas:
PROCEDIMIENTO Y DISPOSITIVO DE ESTIMACIÓN DE LA VELOCIDAD DE UN MOTOR ELÉCTRICO, del 10 de Noviembre de 2011, de SCHNEIDER TOSHIBA INVERTER EUROPE SAS: Procedimiento de estimación de la velocidad de rotación (ω) de un motor eléctrico (M, M') en rodamiento libre, realizándose el procedimiento en un variador […]
 PROCEDIMIENTO PARA ESTIMAR LA POSICIÓN DEL ARMAZÓN POLAR EN UNA MÁQUINA POLAR DE GARRAS, del 4 de Enero de 2011, de ROBERT BOSCH GMBH: Procedimiento para determinar la posición de un componente rotatorio de un generador polar de garras , que se hace funcionar en el sistema R-S-T y que […]
PROCEDIMIENTO PARA ESTIMAR LA POSICIÓN DEL ARMAZÓN POLAR EN UNA MÁQUINA POLAR DE GARRAS, del 4 de Enero de 2011, de ROBERT BOSCH GMBH: Procedimiento para determinar la posición de un componente rotatorio de un generador polar de garras , que se hace funcionar en el sistema R-S-T y que […]
 DETERMINACION DE LA POSICION INICIAL DEL ROTOR SIN SENSOR EN UN MOTOR SINCRONO, del 6 de Agosto de 2010, de OTIS ELEVATOR COMPANY: Procedimiento para determinar la posición de un rotor respecto a un estator en un motor síncrono, comprendiendo el procedimiento:
inyectar una corriente alterna provista de […]
DETERMINACION DE LA POSICION INICIAL DEL ROTOR SIN SENSOR EN UN MOTOR SINCRONO, del 6 de Agosto de 2010, de OTIS ELEVATOR COMPANY: Procedimiento para determinar la posición de un rotor respecto a un estator en un motor síncrono, comprendiendo el procedimiento:
inyectar una corriente alterna provista de […]
Método y aparato para la estimación en línea de la posición inicial del motor de imán permanente de superficie, del 17 de Junio de 2020, de ROBERT BOSCH GMBH: Método para la estimación en línea de una posición inicial de una máquina eléctrica superficial de imanes permanentes en un estado estacionario o en una primera […]
Dispositivo de control de un inversor, del 13 de Mayo de 2020, de LSIS Co., Ltd: Un dispositivo de control del inversor configurado para modificar un voltaje de referencia basado en vectores en un voltaje modificado basado en vectores y para suministrar […]
Aparato para estimar parámetros en un motor de inducción, del 6 de Mayo de 2020, de LSIS Co., Ltd: Un aparato para estimar un parámetro de un motor de inducción que incluye un controlador de corriente que emite tensiones de los ejes […]
Aparato de control de vectores sin sensor para motor de inducción, del 22 de Abril de 2020, de LSIS Co., Ltd: Un aparato de control de vectores sin sensor para controlar un motor de induccion, el aparato caracterizado por: un controlador de corriente que se configura […]
Aparato para estimar un parámetro en un motor de inducción, del 25 de Marzo de 2020, de LSIS Co., Ltd: Un aparato para estimar un parámetro de un motor de inducción que incluye un controlador de corriente que emite tensiones de los ejes d y q en un […]