DETERMINACION DE LA POSICION INICIAL DEL ROTOR SIN SENSOR EN UN MOTOR SINCRONO.
Procedimiento para determinar la posición de un rotor respecto a un estator en un motor síncrono,
comprendiendo el procedimiento:
inyectar una corriente alterna provista de una frecuencia predeterminada y de un ángulo de fase inicial predeterminado a un arrollamiento estatórico del estator;
muestrear la corriente inyectada y la tensión resultante un número predeterminado de veces por periodo de la frecuencia;
calcular una inductancia del estator a partir de las tensiones y corrientes muestreadas empleando un análisis Fourier; y
determinar una posición de un eje d de flujo magnético del rotor respecto del estator a partir de la inductancia calculada del estator
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/US02/03707.
Solicitante: OTIS ELEVATOR COMPANY.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: SNYDER, TROXELL, K., ASSISTANT SECRETARY, OTIS ELEVATOR COMPANY., 10 FARM SPRI ,FARMINGTON, CT 06032-2568.
Inventor/es: VECCHIOTTI, ALBERTO, MARVIN,DARYL,J, SIMONDS,TODD,A, PETROVIC,VLADAN, SHEPARD,MARK.
Fecha de Publicación: .
Fecha Concesión Europea: 5 de Mayo de 2010.
Clasificación Internacional de Patentes:
- H02P21/14S
- H02P6/18H
Clasificación PCT:
- H02P6/18 ELECTRICIDAD. › H02 PRODUCCION, CONVERSION O DISTRIBUCION DE LA ENERGIA ELECTRICA. › H02P CONTROL O REGULACION DE MOTORES ELÉCTRICOS, GENERADORES ELECTRICOS O CONVERTIDORES DINAMOELECTRICOS; CONTROL DE TRANSFORMADORES, REACTANCIAS O BOBINAS DE CHOQUE. › H02P 6/00 Disposiciones para el control de motores síncronos u otros motores dinamoeléctricos mediante conmutación electrónica en función de la posición del rotor; Conmutadores electrónicos a este fin (control vectorial H02P 21/00). › sin elementos separados para detectar la posición.
Clasificación antigua:
- H02P6/18 H02P 6/00 […] › sin elementos separados para detectar la posición.
Fragmento de la descripción:
Determinación de la posición inicial del rotor sin sensor en un motor síncrono.
Campo de la invención
La presente invención se refiere en general a procedimientos y dispositivos de posición angular para motores. Más específicamente, la presente invención se refiere a una técnica y a un aparato para calcular la posición angular absoluta de una máquina elevadora de motor síncrono parada detectando la saturación del yugo estatórico.
Antecedentes de la invención
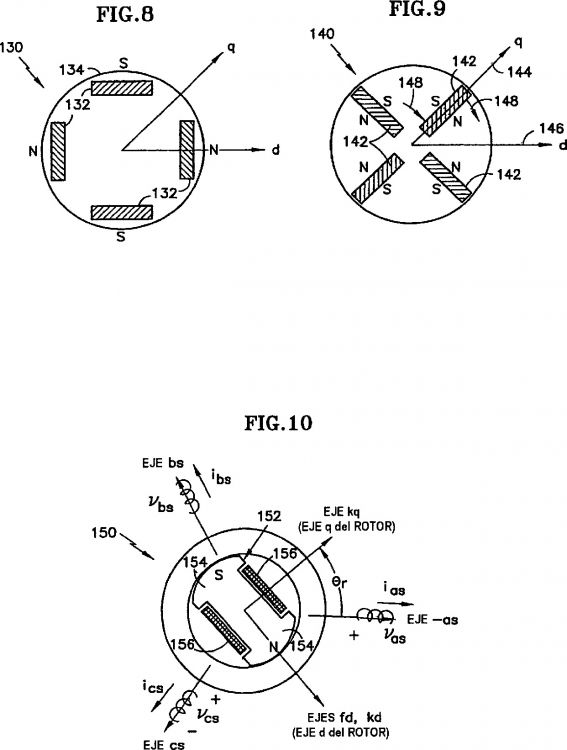
Las máquinas síncronas de imán permanente para sistemas elevadores ofrecen ventajas sobre las máquinas elevadoras convencionales de inducción en lo que concierne al tamaño necesario para un servicio dado. No obstante, los sistemas elevadores que utilizan máquinas elevadoras de motor síncrono han de ser capaces de detectar la posición angular absoluta del rotor, o sea, la posición y dirección del eje del flujo magnético d del rotor, respecto de los arrollamientos del polo del estator para poder conseguir el par máximo.
Es una exigencia particularmente significativa cuando se pierde la posición del rotor debido a circunstancias como un corte del fluido eléctrico. Cuando un ascensor sufre una pérdida de corriente, el freno del ascensor actúa para mantener la cabina del ascensor en posición. Una vez restablecida la corriente, debe estar a disposición de la máquina elevadora y debe controlarse cuando se afloja el freno de la máquina a fin de asegurar un movimiento controlado de la cabina del ascensor en condiciones de carga desequilibrada.
Un codificador incremental con un impulso de avance se ha empleado para establecer la posición absoluta del rotor en las máquinas elevadoras de la técnica anterior. No obstante, puede exigir hasta una vuelta entera de la máquina elevadora para localizar el impulso de avance después de una pérdida de corriente. En los sistemas elevadores mayores, una vuelta de la máquina elevadora puede dar como resultado tanto como la caída de un metro de la cabina del ascensor.
Una técnica que aprovecha el efecto de saturación del yugo estatórico para detectar la posición del rotor de un motor síncrono de imanes permanentes se da a conocer en un artículo titulado "Initial Rotor Angle Detection of a Non-salient Pole Permanent Magnet Synchronous Machine", publicado en los Archivos de Conferencia de la reunión anual de la IEEE-Industry Applications Society, Luisiana, Octubre 5-9, 1997 (en adelante denominado "el artículo"). El artículo describe un procedimiento mediante el cual se aplica un impulso de tensión de banda de frecuencia ancha, de magnitud y anchura apropiadas, a cada arrollamiento de fase del estator. A continuación, se mide una sola muestra de corriente máxima del estator en el dominio temporal correspondiente a cada arrollamiento y se emplea para calcular la inductancia. Puesto que la inductancia variará con la saturación parcial del yugo estatórico y el flujo debido a la posición de los imanes del rotor, el algoritmo puede discernir entre un polo norte y un polo sur, y posteriormente, la posición absoluta del rotor.
No obstante, está técnica presenta problemas inherentes de muestreo en un ambiente ruidoso, como un sistema elevador, que limitan la repetibilidad de los resultados. Esto se debe a que el impulso de tensión generado está compuesto inherentemente de una amplia banda de frecuencias. Por lo tanto, cualquier ruido dentro de la banda de frecuencias del impulso de tensión, por ejemplo, el régimen de conmutación de los transistores en la unidad de frecuencia variable de corriente alterna del ascensor, o cualquiera de sus armónicas, afecta la precisión de las lecturas. También, con esta técnica, se calcula la posición del rotor a partir de una sola medición de inductancia. Por lo tanto, una mala muestra debida al ruido puede ejercer un impacto dramático sobre el cálculo de inductancia. Las curvas irregulares de los resultados experimentales mostradas en la figura 6 del artículo demuestran los errores inherentes en las mediciones de inductancia, puesto que las curvas esperadas deberían ser sinusoides suaves.
Adicionalmente, para conseguir una relación apropiada de señal/ruido con el empleo de esta técnica, se necesitan impulsos de tensión y corriente máximas de magnitud significativamente grandes, por ejemplo, en o cerca de los valores de corriente nominales del motor. Esto impone una cantidad de par no deseable en el sistema de frenado. Para compensar el par, inmediatamente después del impulso de tensión para una fase, se dispara un impulso de tensión en el sentido opuesto para forzar las corrientes de fase nuevamente a cero. Esto fuerza la corriente de marcha libre a cero y ayuda a minimizar el tiempo durante el cual se aplica par al motor.
Existe, por lo tanto, la necesidad de proporcionar un procedimiento mejorado para detectar la posición angular absoluta del rotor respecto de los arrollamientos del estator en un motor síncrono.
Sumario de la invención
La presente invención está definida por las características de las reivindicaciones independientes. Unas formas de realización preferidas de la invención están definidas en las reivindicaciones subordinadas. La presente invención ofrece ventajas y alternativas con respecto a la técnica anterior al proporcionar un procedimiento de determinar la posición angular absoluta de una máquina elevadora de motor síncrono después de un corte del fluido eléctrico. Se inyecta una corriente alterna apropiada con una frecuencia predeterminada en los arrollamientos del estator del motor para determinar la inductancia del estator. La saturación del yugo estatórico debido al flujo magnético causado por los imanes permanentes permite que el algoritmo determine la posición y sentido del eje d del flujo magnético del rotor, y subsiguientemente, la posición absoluta del rotor respecto del estator del motor síncrono. Al emplear el análisis Fourier para calcular la inductancia del estator, este procedimiento goza de un elevado grado de inmunidad frente al ruido tanto repetitivo como aleatorio generado a menudo en tales ambientes ruidosos como un sistema elevador. Adicionalmente, la elevada relación de señal a ruido del procedimiento permite que la corriente inyectada sea relativamente pequeña en comparación con las corrientes nominales del motor, imponiendo por tanto un par mínimamente bajo al sistema de frenado del ascensor.
Estas y otras ventajas se consiguen en una forma de realización ejemplificativa de la invención al proporcionar un procedimiento de determinar la posición de un rotor respecto de un estator en un motor síncrono. Este procedimiento comprende inyectar una corriente alterna provista de una única frecuencia predeterminada y un ángulo de fase inicial predeterminado en un arrollamiento del estator, y muestrear la corriente inyectada y tensión resultante un número predeterminado de veces por periodo de la frecuencia. A continuación, el procedimiento calcula una inductancia del estator a partir de las tensiones y corrientes muestreadas empleando una transformada de Fourier discreta (DFT). Incrementando el ángulo de fase inicial un número predeterminado de veces sobre un ciclo de 360 grados, y repitiendo la inyección, muestreo y cálculo con cada ángulo de fase incrementado, el algoritmo proporciona un número predeterminado de inductancias de estator calculadas. La posición del eje d respecto del estator se determina entonces a partir de la mínima de las inductancias de estator calculadas.
En una forma de realización alternativa de la invención, se inyecta una corriente continua desplazada en los arrollamientos del estator una vez calculadas las inductancias del estator. A continuación, se vuelve a calcular una única inductancia del estator, y se determina la dirección del eje d a partir de la inductancia de estator recalculada.
En otra forma de realización de la invención, se inyecta una corriente continua desplazada, con la corriente alterna en los arrollamientos del estator. A continuación, se determina la dirección del eje d a partir de la mínima de las inductancias de estator calculadas.
Breve descripción de los dibujos
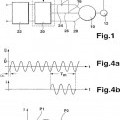
La figura 1 es una vista en perspectiva esquemática de un sistema elevador provisto de una máquina elevadora de motor síncrono de acuerdo con la presente invención.
La figura 2 es una representación esquemática del motor síncrono de la figura 1 con el flujo magnético a lo largo del eje d positivo bloqueado en alineación con el arrollamiento del estator de fase A y enlazado con el mismo.
La figura 3 es una representación esquemática del...
Reivindicaciones:
1. Procedimiento para determinar la posición de un rotor respecto a un estator en un motor síncrono, comprendiendo el procedimiento:
inyectar una corriente alterna provista de una frecuencia predeterminada y de un ángulo de fase inicial predeterminado a un arrollamiento estatórico del estator;
muestrear la corriente inyectada y la tensión resultante un número predeterminado de veces por periodo de la frecuencia;
calcular una inductancia del estator a partir de las tensiones y corrientes muestreadas empleando un análisis Fourier; y
determinar una posición de un eje d de flujo magnético del rotor respecto del estator a partir de la inductancia calculada del estator.
2. Procedimiento según la reivindicación 1, en el que el análisis Fourier comprende además una DFT.
3. Procedimiento según la reivindicación 1, en el que la frecuencia predeterminada comprende además una única frecuencia predeterminada.
4. Procedimiento según la reivindicación 1, que comprende además:
incrementar el ángulo de fase inicial un número predeterminado de veces por encima de un ciclo de 360 grados;
repetir la inyección, el muestreo y el cálculo con cada ángulo de fase incrementado para proporcionar un número predeterminado de inductancias de estator calculadas; y
determinar la posición del eje d respecto del estator a partir de las inductancias de estator calculadas.
5. Procedimiento según la reivindicación 4, en el que la determinación comprende además determinar la posición del eje d a partir de la mínima de las inductancias de estator calculadas.
6. Procedimiento según la reivindicación 5, que comprende además:
inyectar una corriente continua desplazada después de haber calculado las inductancias del estator;
recalcular una única inductancia del estator; y
determinar el sentido del eje d a partir de la inductancia recalculada del estator.
7. Procedimiento según la reivindicación 5, que comprende además:
inyectar una corriente continua desplazada, con la corriente alterna en el arrollamiento estatórico; y
determinar el sentido del eje d a partir de la mínima de las inductancias calculadas del estator.
8. Procedimiento según la reivindicación 2, en el que el análisis Fourier comprende además emplear la fórmula.
en la que:
X(
N es el número de veces que se muestrea la corriente inyectada o la tensión resultante por periodo de tiempo para la frecuencia
T es el tiempo de muestreo;
n es un entero de 1 a N;
x(nT) es la magnitud de la muestra de corriente o tensión para ese tiempo nT; y
a y b son las coordinadas cartesianas real e imaginaria del complejo X(
9. Procedimiento según la reivindicación 8, en el que el cálculo de una inductancia del estator comprende además calcular la inductancia del estator a partir de la parte imaginaria de V(
10. Procedimiento según la reivindicación 9, en el que el cálculo comprende además emplear la fórmula:
donde:
L(?) es la inductancia del estator como función del ángulo de fase predeterminado ?;
av y bv son las coordinadas cartesianas real y mecánica del complejo V(
aI y bI son las coordinadas cartesianas real e imaginaria del complejo I(
11. Procedimiento según la reivindicación 1, en el que se selecciona la frecuencia predeterminada de manera que se halle libre de frecuencias o armónicas de frecuencias de por lo menos una fuente de ruido generado repetitivamente.
12. Procedimiento según la reivindicación 1, en el que la corriente alterna inyectada es relativamente pequeña en comparación con la corriente nominal del motor.
13. Procedimiento según la reivindicación 12, en el que las corrientes alterna y continua inyectadas no son superiores al 20% de la corriente nominal.
14. Procedimiento según la reivindicación 1, en el que el motor síncrono comprende una máquina elevadora.
15. Sistema elevador que comprende:
una cabina de ascensor;
una máquina elevadora provista de una máquina síncrona para izar la cabina de ascensor; y
un sistema de control que incluye un sistema de accionamiento para accionar el motor síncrono, presentando el sistema de control una memoria; incluyendo memoria para un programa ejecutable para determinar la posición de un rotor respecto de un estator en el motor síncrono mediante:
la inyección de una corriente alterna de frecuencia predeterminada y de ángulo de fase inicial predeterminado en un arrollamiento estatórico del estator;
el muestreo de la corriente inyectada y la tensión resultante un número predeterminado de veces por un periodo de la frecuencia;
el cálculo de una inductancia del estator a partir de las tensiones y corrientes muestreadas empleando un análisis Fourier; y
la determinación de una posición de un eje d de flujo magnético del rotor respecto del estator a partir de la inductancia calculada del estator.
16. Sistema elevador según la reivindicación 15, en el que el análisis Fourier comprende además una DFT.
17. Sistema elevador según la reivindicación 15, en el que la frecuencia predeterminada comprende además una única frecuencia predeterminada.
18. Sistema elevador según la reivindicación 15, que comprende además:
incrementar el ángulo de fase inicial un número predeterminado de veces por encima de un ciclo de 360 grados;
repetir la inyección, muestreo y cálculo con cada ángulo de fase incrementado para proporcionar un número predeterminado de inductancias de estator calculadas; y
determinar la posición del eje d respecto del estator a partir de las inductancias de estator calculadas.
19. Sistema elevador según la reivindicación 18, en el que la determinación comprende además determinar la posición del eje d a partir de la mínima de las inductancias de estator calculadas.
20. Sistema elevador según la reivindicación 19, que comprende además:
inyectar una corriente continua desplazada después de haber calculado las inductancias del estator;
recalcular una única inductancia del estator; y
determinar el sentido del eje d a partir de la inductancia recalculada del estator.
21. Sistema elevador según la reivindicación 19, que comprende además:
inyectar una corriente continua desplazada con la corriente alterna en el arrollamiento del estator; y
determinar el sentido del eje d a partir de la mínima de las inductancias calculadas del estator.
22. Sistema elevador según la reivindicación 16, en el que el análisis Fourier comprende además emplear la fórmula.
en la que:
X(
N es el número de veces que se muestrea la corriente inyectada o la tensión resultante por periodo de tiempo para la frecuencia
T es el tiempo de muestreo;
n es un entero de 1 a N;
x(nT) es la magnitud de la muestra de corriente o tensión para ese tiempo nT; y
a y b son las coordinadas cartesianas real e imaginaria del complejo X(
23. Sistema elevador según la reivindicación 22, en el que calcular una inductancia del estator comprende además calcular la inductancia del estator a partir de la parte imaginaria de V(
24. Sistema elevador según la reivindicación 23, en el que calcular comprende además emplear la fórmula:
en la que:
L(?) es la inductancia del yugo estatórico como función del ángulo de fase predeterminado ?;
av y bv son las coordinadas cartesianas real y mecánica del complejo V(
aI y bI son las coordinadas cartesianas real e imaginaria del complejo I(
25. Sistema elevador según la reivindicación 15, en el que se selecciona la frecuencia predeterminada, de tal manera que se halle libre de frecuencias o armónicas de frecuencias de por lo menos una fuente de ruido generado repetitivamente.
26. Sistema elevador según la reivindicación 15, en el que la corriente alterna inyectada es relativamente pequeña en comparación con la corriente nominal del motor.
27. Sistema elevador según la reivindicación 26, en el que las corrientes alterna y continua inyectadas no son superiores al 20% de la corriente nominal.
28. Sistema elevador según la reivindicación 15, en el que el sistema de accionamiento comprende además una unidad ACFV.
Patentes similares o relacionadas:
PROCEDIMIENTO Y DISPOSITIVO DE ESTIMACIÓN DE LA VELOCIDAD DE UN MOTOR ELÉCTRICO, del 10 de Noviembre de 2011, de SCHNEIDER TOSHIBA INVERTER EUROPE SAS: Procedimiento de estimación de la velocidad de rotación (ω) de un motor eléctrico (M, M') en rodamiento libre, realizándose el procedimiento en un variador […]
 PROCEDIMIENTO PARA ESTIMAR LA POSICIÓN DEL ARMAZÓN POLAR EN UNA MÁQUINA POLAR DE GARRAS, del 4 de Enero de 2011, de ROBERT BOSCH GMBH: Procedimiento para determinar la posición de un componente rotatorio de un generador polar de garras , que se hace funcionar en el sistema R-S-T y que […]
PROCEDIMIENTO PARA ESTIMAR LA POSICIÓN DEL ARMAZÓN POLAR EN UNA MÁQUINA POLAR DE GARRAS, del 4 de Enero de 2011, de ROBERT BOSCH GMBH: Procedimiento para determinar la posición de un componente rotatorio de un generador polar de garras , que se hace funcionar en el sistema R-S-T y que […]
 PROCEDIMIENTO PARA ESTIMAR LA VELOCIDAD DE GIRO DEL ROTOR DE UNA MAQUINA DE INDUCCION TRIFASICA, del 15 de Febrero de 2010, de UNIVERSIDAD POLITECNICA DE MADRID: Procedimiento para estimar la velocidad de giro del rotor de una máquina de inducción trifásica partiendo de las medidas de corriente y tensión de dos de las fases de alimentación […]
PROCEDIMIENTO PARA ESTIMAR LA VELOCIDAD DE GIRO DEL ROTOR DE UNA MAQUINA DE INDUCCION TRIFASICA, del 15 de Febrero de 2010, de UNIVERSIDAD POLITECNICA DE MADRID: Procedimiento para estimar la velocidad de giro del rotor de una máquina de inducción trifásica partiendo de las medidas de corriente y tensión de dos de las fases de alimentación […]
 DISPOSITIVO Y PROCEDIMIENTO PARA LA DETERMINACIÓN DEL ÁNGULO ELÉCTRICO DEL ROTOR DE ARRANQUE, del 3 de Junio de 2011, de ROBERT BOSCH GMBH: Procedimiento para la determinación de un ángulo eléctrico del rotor de arranque de un motor eléctrico con las siguientes etapas: impulsión […]
DISPOSITIVO Y PROCEDIMIENTO PARA LA DETERMINACIÓN DEL ÁNGULO ELÉCTRICO DEL ROTOR DE ARRANQUE, del 3 de Junio de 2011, de ROBERT BOSCH GMBH: Procedimiento para la determinación de un ángulo eléctrico del rotor de arranque de un motor eléctrico con las siguientes etapas: impulsión […]
Controlador, del 16 de Octubre de 2019, de Aeristech Control Technologies Limited: Un sistema de control para un motor o generador de imán permanente que incluye tres bobinados de fase individuales, bobinado de fase A, bobinado […]
Procedimiento de control implementado para controlar dos motores eléctricos síncronos de imán permanente conectados en paralelo, del 14 de Agosto de 2019, de SCHNEIDER TOSHIBA INVERTER EUROPE SAS: Procedimiento de control implementado en un convertidor de potencia que comprende una salida conectada a dos motores (Mot1, Mot2) eléctricos […]
Circuito de control y procedimiento de regulación para máquina síncrona, del 10 de Julio de 2019, de SIRONA DENTAL SYSTEMS GMBH: Circuito de control para una máquina síncrona de una pieza de mano dental, que presenta una alimentación de tensión , caracterizado por que el circuito de control presenta […]
Máquina de trabajo agrícola, del 22 de Mayo de 2019, de PÖTTINGER Landtechnik GmbH: Máquina de trabajo agrícola en forma de un remolque autocargador que se puede montar en un tractor , con un recolector que está provisto de un […]