PROCEDIMIENTO PARA ESTIMAR LA POSICIÓN DEL ARMAZÓN POLAR EN UNA MÁQUINA POLAR DE GARRAS.
Procedimiento para determinar la posición de un componente rotatorio de un generador polar de garras (1),
que se hace funcionar en el sistema R-S-T y que para su regulación se requiere la transformación de las magnitudes de estator del sistema R-S-T en el sistema d, q y a la inversa, caracterizado porque el generador polar de garras (1) se divide como sistema completo (15) en un subsistema no observable (18) y en un subsistema observable (19, 29), que contiene un elemento filtrante (20) y entrega magnitudes de salida (17)
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/DE2001/002368.
Solicitante: ROBERT BOSCH GMBH.
Nacionalidad solicitante: Alemania.
Dirección: POSTFACH 30 02 20 70442 STUTTGART ALEMANIA.
Inventor/es: REUTLINGER, KURT, KOELLE, GERHARD, PUSHKOLLI,BEQIR.
Fecha de Publicación: .
Fecha Solicitud PCT: 27 de Junio de 2001.
Fecha Concesión Europea: 11 de Agosto de 2010.
Clasificación Internacional de Patentes:
- H02P21/13 ELECTRICIDAD. › H02 PRODUCCION, CONVERSION O DISTRIBUCION DE LA ENERGIA ELECTRICA. › H02P CONTROL O REGULACION DE MOTORES ELÉCTRICOS, GENERADORES ELECTRICOS O CONVERTIDORES DINAMOELECTRICOS; CONTROL DE TRANSFORMADORES, REACTANCIAS O BOBINAS DE CHOQUE. › H02P 21/00 Disposiciones o métodos de control de máquinas eléctricas mediante control por vector, p. ej., por control de la orientación del campo. › Control por observador, p. ej. utilizando observadores de Luenberger o filtros de Kalman.
- H02P21/14S
- H02P9/02 H02P […] › H02P 9/00 Disposiciones para el control de generadores eléctricos con el propósito de obtener las características deseadas en la salida. › Detalles.
Clasificación PCT:
Clasificación antigua:
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Finlandia, Chipre.
Fragmento de la descripción:
Campo técnico
Para abastecer con energía eléctrica la red de a bordo de vehículos de motor se usan generadores de corriente alterna. A causa de su forma constructiva robusta y de la posibilidad de fabricación económica se ha impuesto para su aplicación a vehículos de motor el generador polar de garras. Éste contiene un paquete de estator chapeado con un devanado trifásico. En el devanado se genera a causa del campo giratorio una corriente alterna trifásica. La batería de un vehículo de motor exige para cargar una corriente continua, por lo que la red de abordo es una red de tensión continua, de tal modo que el generador de corriente alterna está unido a la red de a bordo a través de un puente rectificador. Estado de la técnica
La generación de energía eléctrica en vehículos de motor se realiza mediante generadores polares de garras, que están unidos a la red de a bordo de tensión continua de un vehículo de motor a través de un puente rectificador de diodo pasivo. Los generadores de corriente alterna se dimensionan normalmente de tal forma, que pueden proporcionar la energía eléctrica exigida ya durante la marcha en vacío del motor de combustión interna en el vehículo de motor. En lugar de puentes rectificadores de diodo pasivos pueden usarse también vibradores de impulsos que hacen ya posible una entrega de energía eléctrica, mediante un generador de corriente alterna, con números de revoluciones en el margen inferior de marcha en vacío de un motor de combustión interna.
Las máquinas polares de garras se regulan mediante reguladores o estructuras reguladoras, que exigen la transformación de corrientes y tensiones de los devanados de estator de la máquina eléctrica en el sistema d, q desde el sistema trifásico R-S-T, así como la transformación inversa de los valores de corriente y tensión desde el sistema d, q de nuevo al sistema trifásico R-S-T. Para poder llevar a cabo claramente la transformación con base en una matriz, es necesario conocer la posición angular del armazón polar en la máquina eléctrica, de tal modo que la transformación y la transformación inversa que viene a continuación sean claras y no pueda producirse ninguna subordinación múltiple. La posición del armazón polar se establece usualmente mediante un sensor previsto específicamente para ello, el transmisor de armazón polar.
Aparte de la utilización de un transmisor de la posición del armazón polar, la posición del armazón polar de un generador polar de garras puede realizarse mediante un observador de estado, en donde naturalmente puede usarse también un observador de estado reducido. Los observadores de estado están diseñados en cada caso de tal modo, que estos reconstruyen el estado del sistema después de una modificación de una magnitud de estado. Sin embargo, mediante un observador de estado puede aparecer en un tramo de regulación una estructura de regulación en la que las perturbaciones estocásticas no se detecten y regulen o sólo se haga de forma insuficiente. Representación de la invención
Con el procedimiento propuesto conforme a la invención puede evitarse por un lado el uso de un transmisor de la posición del armazón polar como pieza constructiva adicional sobre un generador polar de garras, de tal modo que puede prescindirse de los costes inherentes a su utilización para medir la posición angular del armazón polar.
Por otro lado mediante la utilización de un elemento filtrante, de forma preferida un elemento filtrante Kalman-Bucy, puede realizarse a partir de ahora también un registro en influencias estocásticas inherentes a un tramo de regulación, lo que representa un avance, ya que con observadores de estado sólo es posible una reconstrucción que se produce con retardo del estado del sistema, después de la modificación de una magnitud de estado del sistema. En el caso de los observadores utilizados hasta ahora se establece una matriz de transformación para la transformación del sistema d, q en el sistema R-S-T y a la inversa, con base en una prefijación polar. De la precisión de la prefijación polar depende también la precisión de la transformación y la transformación inversa. Por el contrario, en el caso del elemento filtrante usado la precisión de la transformación resulta de la optimización de una medida de calidad requerida. Mediante la utilización de esta medida de calidad a la hora de establecer la transformación del sistema d, q en el sistema R-S-T de la máquina eléctrica, puede conseguirse una precisión bastante mejorada. Dibujo
Con base en el dibujo se explica a continuación la invención con más detalle.
Aquí muestran: la figura 1 una representación esquemática de un generador polar de garras con devanado de rotor y estator, la figura 2 una representación equivalente del generador polar de garras en el espacio de estado, la figura 3 la división del sistema de generador polar de garras en un subsistema observable y otro no observable y la figura 4 una representación más detallada del subsistema observable y del filtro Kalman-Bucy. La figura 5 una posibilidad de configuración alternativa del subsistema observable como observador de estado reducido y la figura 6 un circuito de medición para establecer la posición del rotor del generador polar de garras en reposo. Variantes de ejecución
La representación conforme a la figura 1 muestra, en una reproducción esquemática, un generador polar de garras con devanado de excitador y de estator.
De la representación conforme a la figura 1 se deduce el devanado de excitador 2, por el que circula una corriente de excitación iF con el símbolo de referencia 3, al aplicar una tensión a sus bornes de conexión. La máquina eléctrica 1, que se compone fundamentalmente del devanado de excitador 2 y del devanado de estator 4, está configurada como máquina de corriente alterna y se hace funcionar en el sistema R-S-T. Dirigidos hacia fuera del devanado de estator 4 se han representado en la representación conforme a la figura 1 tres ramales de fase, que se corresponden con las fases R, S y T.
La figura 2 reproduce la representación equivalente de la máquina eléctrica 1 conforme a la figura 1, en el espacio de estado.
En el espacio de estado 14 se ha representado la máquina eléctrica 1 en forma equivalente, caracterizada fundamentalmente por la derivación 10 del vector de estado x. La magnitud de entrada es el vector de entrada u. El vector de entrada u se compone de las tensiones de estator transformadas ud, uq, del sistema R-S-T se ha transformado al sistema d, q y de la tensión de rotor en la máquina eléctrica 1. La derivación de vector de estado 9 viene dada por la ecuación:
**(Ver fórmula)**
En la misma r(t) designa el ruido del sistema, x el vector de estado, que contiene la corriente de excitador iF y las corrientes de estator transformadas id, iq, que también se han transferido del sistema R-S-T al sistema d, q. La parte de corriente de estator iq determina en gran medida el par de giro que puede alcanzarse con la máquina eléctrica 1. El vector de estado 9 se obtiene mediante el enlace con una constante C en un punto de suma 13, en el que existe un ruido de medición ρ(t). Teniendo en cuenta el ruido de medición ρ(t), caracterizado por el símbolo de referencia 12, se forma el vector de tensión de salida y, caracterizado por el símbolo de referencia 8.
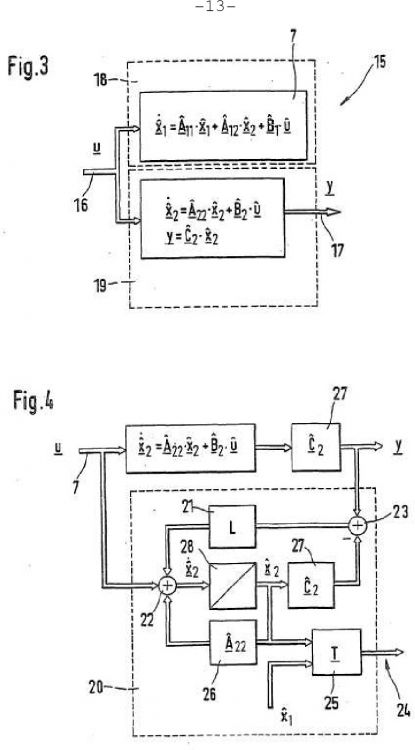
La figura 3 muestra la representación del sistema completo máquina eléctrica en subsistemas.
La máquina eléctrica 1 puede dividirse, partiendo del sistema completo 15, en un subsistema observable 19 y un subsistema no observable 18. En el subsistema observable 19 puede estimarse las magnitudes de estado mediante la instalación de un elemento filtrante Kalman-Bucy (véase la figura 4). Las magnitudes de estado del subsistema no observable 18 se calculan por el contrario. Para el cálculo de las magnitudes de estado de este subsistema se utilizan las magnitudes de estado del subsistema observable 19, obtenidas mediante el elemento filtrante 20 que, sin embargo, teniendo en cuenta que se desprecian las influencias estocásticas en el tramo de regulación, también podrían establecerse a través de un observador de estado. Las magnitudes de estado tanto calculadas como estimadas se transforman inversamente mediante el enlace con la matriz de transformación, de donde se obtiene una posición angular del armazón polar estimada, que se corresponde con la posición real del armazón polar.
La figura 4 reproduce una representación detallada del subsistema...
Reivindicaciones:
1. Procedimiento para determinar la posición de un componente rotatorio de un generador polar de garras (1), que se hace funcionar en el sistema R-S-T y que para su regulación se requiere la transformación de las magnitudes de estator del sistema R-S-T en el sistema d, q y a la inversa, caracterizado porque el generador polar de garras (1) se divide como sistema completo (15) en un subsistema no observable (18) y en un subsistema observable (19, 29), que contiene un elemento filtrante (20) y entrega magnitudes de salida (17).
2. Procedimiento según la reivindicación 1, caracterizado porque en el 10 subsistema observable (19) está alojado un elemento filtrante (20) Kalman-Bucy, el cual estima las magnitudes de estado del subsistema observable (19).
3. Procedimiento según la reivindicación 1, caracterizado porque en el subsistema observable (19) está alojado un observador de estado, el cual calcula de nuevo las magnitudes de estado del subsistema observable (19) después de una
15 modificación de estado. 4. Procedimiento según la reivindicación 1, caracterizado porque la máquina eléctrica (1) se divide mediante una matriz de transformación T en un subsistema no observable (18) y un subsistema observable (19).
5. Procedimiento según la reivindicación 2, caracterizado porque se establece 20 una matriz L (21) en el elemento filtrante (20) del subsistema observable (19) a partir de la optimización de una magnitud de calida cuadrática.
**(Ver fórmula)**
6. Procedimiento conforme a la reivindicación 2, caracterizado porque las magnitudes de estado (9) del subsistema observable (19) del sistema completo (15) 25 máquina polar de garras (1) mediante el elemento filtrante (20)
7. Procedimiento conforme a las reivindicaciones 2 ó 3, caracterizado porque con las magnitudes de estado estimadas o calculadas del subsistema observable (19) se calculan las magnitudes de estado del subsistema no observable (18).
8. Procedimiento conforme a las reivindicaciones 6 ó 7, caracterizado porque las magnitudes de estado estimadas y las magnitudes de estado calculadas de los subsistemas (18, 19) se transforman inversamente mediante el enlace con una matriz de transformación T.
- 11
9. Procedimiento conforme a la reivindicación 6, caracterizado porque las magnitudes de estado (9) de las corrientes de estator transformadas del sistema d, q contienen la frecuencia circular ω así como el ángulo del armazón polar del rotor de la máquina polar de garras (1).
5 10. Procedimiento según la reivindicación 1, caracterizado porque para establecer la posición inicial del rotor en el circuito de excitador (2, 32) de la máquina polar de garras (1) está dispuesta una fuente de tensión (32) variable en el tiempo y se realiza una medición (33, 34) de las tensiones de ramal (5) del devanado de estator (4).
Patentes similares o relacionadas:
Generador eléctrico variable, del 22 de Abril de 2020, de RAW HOLDINGS AS: Un generador eléctrico variable para convertir movimiento mecánico en energía eléctrica, en donde el generador incluye al menos un elemento de estator y un elemento […]
Inversor para generador eléctrico y generador eléctrico de inversión, del 4 de Diciembre de 2019, de Chongqing RATO Technology Co., Ltd: La presente solicitud se refiere a un inversor para un generador eléctrico y un generador eléctrico de inversión, que pertenece al campo de los generadores eléctricos […]
Controlador, del 16 de Octubre de 2019, de Aeristech Control Technologies Limited: Un sistema de control para un motor o generador de imán permanente que incluye tres bobinados de fase individuales, bobinado de fase A, bobinado […]
Sistema y procedimiento para una característica de anticipación de carga y su procedimiento de ajuste para un grupo generador, del 31 de Mayo de 2019, de Basler Electric Company: Un procedimiento para disponer una característica de anticipación de carga para un grupo generador diesel que incluye un motor diesel , un generador […]
DISPOSITIVO GENERADOR DE ENERGÍA ELÉCTRICA, del 27 de Diciembre de 2018, de NAYCO MANAGEMENT, S.L: Dispositivo generador de energía eléctrica, comprende al menos un imán , como elemento inductor, y al menos un par de bobinados , como […]
Un método y una disposición de control para el control de un generador de corriente alterna, del 24 de Septiembre de 2018, de VESTAS WIND SYSTEMS A/S: Un método para el control de un generador de corriente alterna (CA) multifase que se conecta a un convertidor controlable, teniendo el generador un rotor con un […]
Procedimiento para el control de una instalación de energía eólica, del 2 de Agosto de 2017, de Wobben Properties GmbH: Procedimiento para el control de una instalación de energía eólica, que presenta un generador con un estator y un rotor, para eliminar un precipitado de humedad sobre […]
Procedimiento para detectar el resbalamiento en sistemas de generadores y de generadores de arranque, del 3 de Mayo de 2017, de ROBERT BOSCH GMBH: Procedimiento para detectar el resbalamiento en el accionamiento de generadores de corriente trifásica, que se controlan con un control […]