DISPOSITIVO ACCIONADOR ELECTROMECANICO PARA SU UTILIZACION CON INSTRUMENTOS DE ANASTOMOSIS, GRAPADO Y RESECCION.
Instrumento de sujeción y grapado lineal (180), instrumento de anastomosis y grapado (200),
que presentan cada uno diferentes funciones, y accionador electromecánico (100) para accionar de manera remota los instrumentos (180, 200), presentando los instrumentos (180, 200) elementos giratorios (158a, 158b, 206a, 206b) en los mismos, comprendiendo el accionador electromecánico (100) un árbol flexible (122) y una parte de mango (102),
incluyendo el árbol flexible (122) por lo menos dos elementos axialmente rotatorios y flexibles (136a, 136b) dispuestos dentro del árbol flexible (122), presentando dichos elementos rotatorios (136a, 136b) unos extremos distal y proximal, pudiendo transmitir cada elemento rotatorio (136a, 136b) un par de torsión aplicado al extremo proximal del mismo a lo largo del mismo hasta dicho extremo distal del mismo, incluyendo dichos extremos distales unos medios para acoplarse a dichos elementos giratorios correspondientes (158a, 158b, 206a, 206b) de los instrumentos quirúrgicos (180, 200),
caracterizados porque la parte de mango (102) presenta una disposición de motor que comprende por lo menos dos motores engranables selectivamente (110, 112) dispuestos en la parte de mango (102) y acoplados con los elementos correspondientes de dichos elementos rotatorios (136a, 136b), haciendo el engranaje selectivo de cualquiera de dichos por lo menos dos motores (110, 112) que rote el elemento rotatorio correspondiente (136a, 136b), transmitiendo así un par de torsión a un elemento giratorio correspondiente (158a, 158b, 206a, 206b) de los instrumentos (108, 200), y porque los instrumentos (180, 200) son cada uno accesorios que presentan una interfaz de acoplamiento (154, 203) concebida en común que está adaptada para unirse al accionador electromecánico (100) y porque el accionador electromecánico (100) puede reutilizarse para activar las diferentes funciones de cada instrumento (180, 200), de manera que las diferentes funciones de los instrumentos (180, 200) son únicamente específicas de los accesorios
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/US00/15311.
Solicitante: POWERMED INC.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: P.O. BOX 1021,WASHINGTON CROSSING, PA 18977.
Inventor/es: WHITMAN, MICHAEL, P..
Fecha de Publicación: .
Fecha Concesión Europea: 11 de Agosto de 2010.
Clasificación Internacional de Patentes:
- A61B17/072B
- A61B17/11D
Clasificación PCT:
- A61B17/08 NECESIDADES CORRIENTES DE LA VIDA. › A61 CIENCIAS MEDICAS O VETERINARIAS; HIGIENE. › A61B DIAGNOSTICO; CIRUGIA; IDENTIFICACION (análisis de material biológico G01N, p.ej. G01N 33/48). › A61B 17/00 Instrumentos, dispositivos o procedimientos quirúrgicos, p. ej. torniquetes (A61B 18/00 tiene prioridad; dispositivos anticonceptivos, pesarios, dispositivos para su introducción A61F 6/00; cirugía ocular A61F 9/007; cirugía otorrina A61F 11/00). › Clamps para heridas.
Clasificación antigua:
- A61B17/08 A61B 17/00 […] › Clamps para heridas.
Fragmento de la descripción:
Dispositivo accionador electromecánico para su utilización con instrumentos de anastomosis, grapado y resección.
Antecedentes de la invención
La presente invención se refiere, en general, a un dispositivo electromecánico para su utilización con herramientas quirúrgicas de anastomosis, grapado y resección y, más específicamente, a un dispositivo electromecánico mediante el cual pueden activarse de manera remota instrumentos quirúrgicos tales como herramientas de anastomosis, grapado y resección.
Cuando se identifica tejido canceroso u otro tejido anómalo en el tracto gastrointestinal, a menudo se recomienda una intervención quirúrgica. El campo de la cirugía oncológica y, más específicamente, el procedimiento quirúrgico mediante el cual se reseca una sección del tracto gastrointestinal que incluye tejido canceroso u anómalo, incluye varios instrumentos diseñados de manera exclusiva. En combinación con una descripción de la presente instrumentación y sus funciones, se proporciona también una descripción del estado de la técnica en este procedimiento quirúrgico.
La primera cuestión que debe responderse a la hora de determinar cómo tratar el cáncer gastrointestinal se refiere a la ubicación específica del tejido canceroso. Esto es muy importante en la medida en que los instrumentos que se proporcionan en la presente técnica presentan limitaciones relativas a cuánto pueden insertarse en el tracto gastrointestinal. Si el tejido canceroso está demasiado arriba desde el colon, por ejemplo, entonces no sirve la instrumentación convencional proporcionada, por lo que se requieren adaptaciones especiales. Estas adaptaciones generalmente aumentan el riesgo de contaminación de los tejidos circundantes con contenido del intestino grueso, aumentan la duración de la cirugía y la correspondiente necesidad de anestesia, y anulan los beneficios de una anastomosis y un grapado precisos derivados de la utilización de un dispositivo mecanizado.
Más específicamente, en caso de que el tejido canceroso esté ubicado en una posición en el colon a la que puede accederse mediante la presente instrumentación, el abdomen del paciente se abre inicialmente para dejar al descubierto el intestino grueso. El cirujano utiliza entonces un dispositivo lineal de corte y grapado que corta el tubo del colon a cada lado del tejido canceroso, creando así dos extremos grapados del intestino grueso (un extremo distal dirigido hacia el ano y el extremo proximal que está más próximo al intestino delgado). Esto se realiza con el fin de minimizar temporalmente la contaminación.
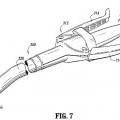
Más particularmente, haciendo referencia a la figura 1, el intestino grueso está situado entre los elementos de tijera 12, 14 en la punta del instrumento de grapado lineal 10. Al apretar el disparador 16 en el mango 18 del dispositivo, el cirujano hace que los elementos de tijera 12, 14 se junten. Entonces se activa un segundo disparador (o una acción secundaria del mismo disparador) para impulsar una serie de grapas 20 a través del extremo sujeto del colon, cerrando y atravesando de este modo los extremos.
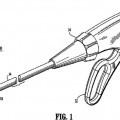
El cirujano abre entonces parcialmente el extremo proximal e inserta la parte de yunque extraíble de un instrumento de anastomosis y grapado en el extremo proximal al descubierto. Esta etapa, así como las del resto del procedimiento quirúrgico, se refieren al funcionamiento de este instrumento quirúrgico. Más particularmente, y con respecto a la figura 2, el cirujano comienza cogiendo el instrumento 30 y gira manualmente la rueda 32 en la base del mango 34 que hace que la cabeza 36 del yunque en el extremo opuesto avance hacia delante. El cirujano continúa girando la rueda 32 hasta que la cabeza 36 del yunque avanza hasta su posición extendida más extrema. Este giro manual requiere casi treinta rotaciones completas. Una vez totalmente extendida, la cabeza del yunque del instrumento se desacopla del mismo y se inserta en la abertura parcial del extremo proximal de manera que la varilla de acoplamiento se extiende hacia fuera a través de la misma. Esta abertura parcial del extremo proximal se cierra entonces mediante sutura. El árbol de extensión 38 del instrumento de anastomosis y grapado 30 se inserta entonces y se hace avanzar al interior del colon inferior, de manera transanal, hasta que el vástago 40 de acoplamiento del mismo se extiende a través del extremo distal grapado. El cirujano une entonces los extremos de acoplamiento del yunque y el árbol y empieza a rotar de nuevo manualmente la rueda en el mango, esta vez acercando la cabeza del yunque al extremo 42 del árbol.
Una vez que la cabeza del yunque y el árbol se han aproximado, después de que el cirujano haya rotado manualmente la rueda otras treinta veces, se activa manualmente un disparador 44 de tipo agarre en el mango. Esta activación hace que una cuchilla circular 46 avance axialmente desde la punta del árbol y que entre en contacto con la cara 48 opuesta del yunque 36. La cuchilla corta los extremos cerrados mediante grapas de los extremos proximal y distal del colon, cortando de este modo también un nuevo par de extremos de las partes proximal y distal del colon. El tejido que se ha escindido se mantiene en un volumen interior en el extremo del árbol.
De manera inmediata tras el corte, los extremos recién abiertos se unen mediante una serie de grapas 50 que se hacen avanzar a través de orificios en el perímetro de la punta del árbol (presionándose contra y cerrándose por la cara opuesta del yunque). El árbol y el yunque acoplados se extraen entonces del paciente.
Más particularmente con respecto a las características estructurales del instrumento de grapado lineal 10 de la técnica anterior que se proporciona en la figura 1, el dispositivo comprende una estructura 18 de pistola de tipo agarre que presenta un árbol alargado 19 y una parte distal 20. La parte distal incluye un par de elementos de agarre de tipo tijeras 12, 14 que sujetan los extremos abiertos del colon cerrándolos. De hecho, sólo uno de los dos elementos de agarre de tipo tijeras, la parte de mordaza superior 12, se mueve (pivota) con respecto a la estructura global; el otro permanece fijo. La activación de estos medios de tijera (el pivotado de la parte de mordaza superior 12) se controla por medio de un disparador de agarre 16 situado en el mango. Se han dado a conocer diversos medios diferentes para mantener cerradas las puntas de los brazos de tijera, incluyendo elementos de acción rápida, pinzas, aros, etc.
Además de los medios de tijera, la parte distal también incluye un mecanismo de grapado. La mordaza inferior inmóvil 14 del mecanismo de tijera incluye una zona de alojamiento de cartucho de grapas y un mecanismo para impulsar las grapas 20 hacia arriba a través del extremo sujeto del colon, en contra de la parte de mordaza superior, sellando así el extremo previamente abierto. Los elementos de tijera pueden estar formados de manera solidaria con el árbol, o pueden ser separables de manera que puedan intercambiarse diversos elementos de tijera y grapado.
Más particularmente con respecto a las características estructurales del instrumento de anastomosis y grapado de la técnica anterior que se proporciona en la figura 2, el dispositivo comprende una parte de yunque 36, una parte de grapa, cuchilla y depósito 42, una parte de árbol 38 y una parte de mango 34. La parte de yunque 36, que puede extraerse selectivamente de la punta del árbol, presenta forma de bala, presentando una parte superior de punta roma, una superficie 48 de soporte de corte plana en la parte inferior y una varilla de acoplamiento 41 que se extiende axialmente desde la superficie inferior.
La parte de grapa, cuchilla y depósito 42 (parte de SBR) del instrumento se proporciona en el extremo distal del instrumento, e incluye un vástago 40 de acoplamiento que puede hacerse avanzar y retroceder selectivamente para alojar selectivamente en su interior la parte de yunque. Esta acción del vástago de acoplamiento la proporciona un mecanismo de árbol roscado y tornillo sin fin montado en el mango 34 (que se describe con mayor detalle a continuación). La parte de SBR es de forma cilíndrica, formando un alojamiento que presenta un interior hueco. Es este interior hueco el que forma el depósito 47. La cuchilla 46 es cilíndrica de manera similar, y se aloja en el interior del alojamiento, contra la pared interior del mismo. La cuchilla puede hacerse avanzar selectiva y axialmente fuera del alojamiento, según la activación de un mecanismo disparador 44 del mango (que...
Reivindicaciones:
1. Instrumento de sujeción y grapado lineal (180), instrumento de anastomosis y grapado (200), que presentan cada uno diferentes funciones, y accionador electromecánico (100) para accionar de manera remota los instrumentos (180, 200), presentando los instrumentos (180, 200) elementos giratorios (158a, 158b, 206a, 206b) en los mismos, comprendiendo el accionador electromecánico (100) un árbol flexible (122) y una parte de mango (102),
incluyendo el árbol flexible (122) por lo menos dos elementos axialmente rotatorios y flexibles (136a, 136b) dispuestos dentro del árbol flexible (122), presentando dichos elementos rotatorios (136a, 136b) unos extremos distal y proximal, pudiendo transmitir cada elemento rotatorio (136a, 136b) un par de torsión aplicado al extremo proximal del mismo a lo largo del mismo hasta dicho extremo distal del mismo, incluyendo dichos extremos distales unos medios para acoplarse a dichos elementos giratorios correspondientes (158a, 158b, 206a, 206b) de los instrumentos quirúrgicos (180, 200),
caracterizados porque la parte de mango (102) presenta una disposición de motor que comprende por lo menos dos motores engranables selectivamente (110, 112) dispuestos en la parte de mango (102) y acoplados con los elementos correspondientes de dichos elementos rotatorios (136a, 136b), haciendo el engranaje selectivo de cualquiera de dichos por lo menos dos motores (110, 112) que rote el elemento rotatorio correspondiente (136a, 136b), transmitiendo así un par de torsión a un elemento giratorio correspondiente (158a, 158b, 206a, 206b) de los instrumentos (108, 200), y porque los instrumentos (180, 200) son cada uno accesorios que presentan una interfaz de acoplamiento (154, 203) concebida en común que está adaptada para unirse al accionador electromecánico (100) y porque el accionador electromecánico (100) puede reutilizarse para activar las diferentes funciones de cada instrumento (180, 200), de manera que las diferentes funciones de los instrumentos (180, 200) son únicamente específicas de los accesorios.
2. Instrumento de sujeción y grapado lineal (180), instrumento de anastomosis y grapado (200) y accionador electromecánico (100) según la reivindicación 1, en los que el instrumento de sujeción y grapado lineal (180) comprende:
un par de mordazas opuestas (150, 152) que pueden separarse y cerrarse selectivamente según la rotación de uno de dichos por lo menos dos elementos giratorios (158a, 158b, 206a, 206b),
una pluralidad de grapas (174) y un mecanismo accionador de grapas (166), estando dicho mecanismo accionador de grapas (166) acoplado selectivamente en relación de accionamiento de grapas a un segundo elemento de dichos por lo menos dos elementos giratorios (158a, 158b, 206a, 206b).
3. Instrumento de sujeción y grapado lineal (180), instrumento de anastomosis y grapado (200) y accionador electromecánico (100) según la reivindicación 2, en los que un primero de los elementos rotatorios (136a, 136b) efectúa un movimiento relativo de las mordazas (150, 152) entre una posición abierta y cerrada, y en los que el segundo de los elementos rotatorios (136b, 136b) acciona el mecanismo accionador de grapas (166).
4. Instrumento de sujeción y grapado lineal (180), instrumento de anastomosis y grapado (200) y accionador electromecánico (100) según cualquiera de las reivindicaciones anteriores, en los que el mango (102) incluye una fuente de alimentación (114) acoplada a dichos por lo menos dos motores (110, 112) para accionarlos de manera independiente.
5. Instrumento de sujeción y grapado lineal (180), instrumento de anastomosis y grapado (200) y accionador electromecánico (100) según la reivindicación 4, en los que la fuente de alimentación (114) es una fuente de corriente continua.
6. Instrumento de sujeción y grapado lineal (180), instrumento de anastomosis y grapado (200) y accionador electromecánico (100) según la reivindicación 4, en los que la fuente de alimentación (114) es reversible de manera que los motores (110, 112) pueden polarizarse de manera inversa, accionando así los motores en el sentido de rotación opuesto.
7. Instrumento de sujeción y grapado lineal (180), instrumento de anastomosis y grapado (200) y accionador electromecánico (100) según la reivindicación 6, que incluyen un conmutador (116) activable manualmente que se acopla a dicha fuente de alimentación (114) para invertir selectivamente la fuente de alimentación, haciendo así selectivamente que los motores (110, 112) roten en el sentido opuesto.
8. Instrumento de sujeción y grapado lineal (180), instrumento de anastomosis y grapado (200) y accionador electromecánico (100) según cualquiera de las reivindicaciones anteriores, que incluyen un circuito eléctrico activable (120) y unos medios indicadores (118) acoplados al mismo, en los que el circuito eléctrico activable (120) puede acoplarse a los sensores correspondientes (178a, 178b, 240a, 240b) en dichos instrumento de sujeción y grapado lineal (180) e instrumento de anastomosis y grapado (200), pudiendo dichos medios indicadores (118) indicar las posiciones de dichos instrumento de sujeción y grapado lineal (180) e instrumento de anastomosis y grapado (200) en respuesta al estado del circuito eléctrico (120).
9. Instrumento de sujeción y grapado lineal (180), instrumento de anastomosis y grapado (200) y accionador electromecánico (100) según la reivindicación 8, en los que los medios indicadores (118) comprenden un LCD.
10. Instrumento de sujeción y grapado lineal (180), instrumento de anastomosis y grapado (200) y accionador electromecánico (100) según cualquiera de las reivindicaciones anteriores, en los que los extremos distales de los elementos rotatorios (136a, 136b) están conformados hexagonalmente, y los elementos giratorios (158a, 158b, 206a, 206b) del instrumento de sujeción y grapado lineal (180) y el instrumento de anastomosis y grapado (200) incluyen, cada uno, los casquillos hexagonales correspondientes (156a, 156b, 205a, 205b), de manera que los elementos rotatorios (136a, 136b) pueden acoplarse y transmitir un par de torsión a los elementos giratorios correspondientes (158a, 158b, 206a, 206b) del instrumento de sujeción y grapado lineal (180) y el instrumento de anastomosis y grapado (200) mediante un ajuste de interferencia con dichos elementos giratorios (158a, 158b, 206a, 206b).
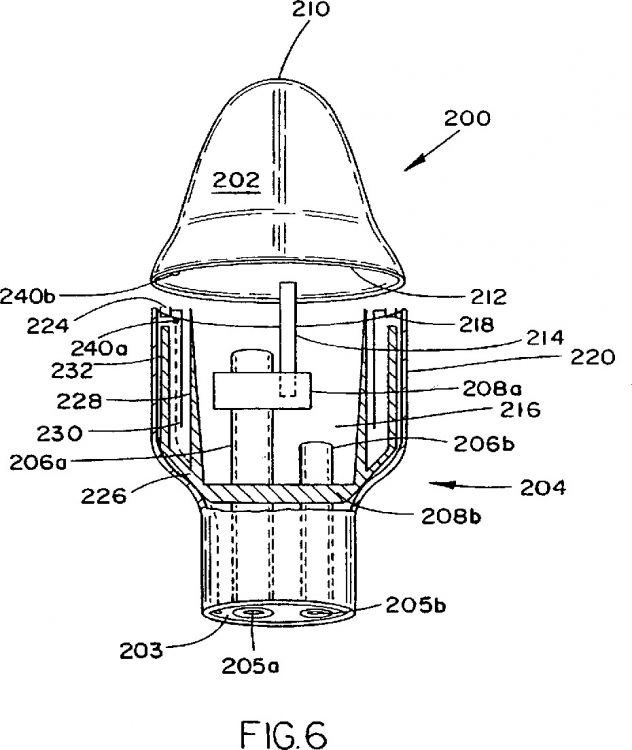
11. Instrumento de sujeción y grapado lineal (180), instrumento de anastomosis y grapado (200) y accionador electromecánico (100) según la reivindicación 1, en los que el instrumento de anastomosis y grapado (200) comprende:
una parte de yunque (202) que puede hacerse avanzar y retroceder selectivamente según la rotación de uno de dichos por lo menos dos elementos rotatorios (136a, 136b); y
una parte de alojamiento de cuchilla y grapas (204), que puede acoplarse selectivamente a dicha parte de yunque (202), incluyendo además dicha parte de alojamiento (204) un conjunto de accionador de grapa (226) y cuchilla (228) que está acoplado a un segundo de dichos por lo menos dos elementos rotatorios (136a, 136b) de manera que la activación selectiva de dicho segundo elemento rotatorio (136b) hace que dicho accionador de grapa y dicha cuchilla avancen fuera del alojamiento (204) y hacia la parte de yunque (202).
12. Instrumento de sujeción y grapado lineal (180), instrumento de anastomosis y grapado (200) y accionador electromecánico (100) según cualquiera de las reivindicaciones anteriores, que comprende un disparador respectivo (108a, 108b) correspondiente a cada uno de los elementos rotatorios (136a, 136b), controlando cada disparador respectivo de manera independiente un elemento respectivo de los elementos rotatorios.
13. Instrumento de sujeción y grapado lineal (180), instrumento de anastomosis y grapado (200) y accionador electromecánico (100) según cualquiera de las reivindicaciones anteriores, en los que el extremo distal de cada uno de los elementos rotatorios (136a, 136b) está configurado para acoplarse de manera liberable con el instrumento de sujeción y grapado lineal (180) y el instrumento de anastomosis y grapado (200).
14. Instrumento de sujeción y grapado lineal (180), instrumento de anastomosis y grapado (200) y accionador electromecánico (100) según cualquiera de las reivindicaciones anteriores, en los que un extremo distal del árbol flexible (122) está configurado para acoplarse con el instrumento de sujeción y grapado lineal (180) y el instrumento de anastomosis y grapado (200).
15. Instrumento de sujeción y grapado lineal (180), instrumento de anastomosis y grapado (200) y accionador electromecánico (100) según cualquiera de las reivindicaciones anteriores, en los que el extremo distal del árbol flexible (122) está configurado para acoplarse de manera liberable al instrumento de sujeción y grapado lineal (180) y al instrumento de anastomosis y grapado (200).
16. Instrumento de sujeción y grapado lineal (180), instrumento de anastomosis y grapado (200) y accionador electromecánico (100) según cualquiera de las reivindicaciones anteriores, en los que el extremo distal de cada uno de los elementos rotatorios (136a, 136b) está configurado para alojarse en un casquillo respectivo (156a, 156b, 205a, 205b) del instrumento de sujeción y grapado lineal (180) y el instrumento de anastomosis y grapado (200).
17. Instrumento de sujeción y grapado lineal (180), instrumento de anastomosis y grapado (200) y accionador electromecánico (100) según cualquiera de las reivindicaciones anteriores, en los que el extremo distal de cada uno de los elementos rotatorios (136a, 136b) está configurado para alojarse de manera liberable en un casquillo respectivo (156a, 156b, 205a, 205b) del instrumento de sujeción y grapado lineal (180) y el instrumento de anastomosis y grapado (200).
18. Instrumento de sujeción y grapado lineal (180), instrumento de anastomosis y grapado (200) y accionador electromecánico (100) según cualquiera de las reivindicaciones anteriores, en los que el árbol (122) incluye un primer mecanismo de acoplamiento y en los que el instrumento de sujeción y grapado lineal (180) y el instrumento de anastomosis y grapado (200) incluyen, cada uno, un segundo mecanismo de acoplamiento (154, 203) complementario al primer mecanismo de acoplamiento.
19. Instrumento de sujeción y grapado lineal (180), instrumento de anastomosis y grapado (200) y accionador electromecánico (100) según cualquiera de las reivindicaciones anteriores, en los que la disposición de motor está configurada para accionar los elementos rotatorios (136a, 136b) de manera independiente entre sí.
Patentes similares o relacionadas:
DISPOSITIVO MOTRIZ ELECTRO-MECÁNICO PARA USAR CON INSTRUMENTOS DE ANASTOMOSIS, GRAPADO Y RESECCIÓN, del 8 de Febrero de 2012, de TYCO HEALTHCARE GROUP LP: Accesorios quirúrgicos que tienen cada uno funciones distintas y teniendo unos miembros de giro (158a, 158b, 206a, 206b) en los mismos, y un conjunto de controlador […]
DISPOSITIVOS PARA COLOCACIÓN DE DIVISIONES DENTRO DE UN ÓRGANO CORPORAL HUECO, del 14 de Noviembre de 2011, de ETHICON ENDO-SURGERY, INC.: Un dispositivo de gastroplastia, usado para colocar plicaturas dentro de al menos una cavidad, que comprende: un miembro alargado flexible, que […]
INSTRUMENTO QUIRÚRGICO QUE INCLUYE UN CONJUNTO DE BLOQUEO, del 4 de Noviembre de 2011, de TYCO HEALTHCARE GROUP LP: Instrumento quirúrgico que comprende: una parte de mango que incluye un mango móvil ; una parte de cuerpo que se extiende distalmente desde la parte de […]
GRAPADORA QUIRÚRGICA CON ARTICULACIÓN UNIVERSAL Y DISPOSITIVO DE SUJECIÓN PREVIA DEL TEJIDO, del 2 de Septiembre de 2011, de TYCO HEALTHCARE GROUP LP: Un conjunto de herramienta para una grapadora quirúrgica para utilizar en un procedimiento quirúrgico endoscópico, que comprende: un yunque y un conjunto […]
 GRAPADORA QUIRÚRGICA, del 7 de Junio de 2011, de TYCO HEALTHCARE GROUP LP: Una grapadora quirúrgica que comprende: una primera mordaza adaptada para recibir un cartucho de grapas en un extremo distal de la […]
GRAPADORA QUIRÚRGICA, del 7 de Junio de 2011, de TYCO HEALTHCARE GROUP LP: Una grapadora quirúrgica que comprende: una primera mordaza adaptada para recibir un cartucho de grapas en un extremo distal de la […]
ARTICULACIÓN Y MECANISMOS DE FUERZA DE ACTIVACIÓN, del 7 de Junio de 2011, de TYCO HEALTHCARE GROUP LP: Instrumento quirúrgico , que comprende: un mango que presenta un elemento tubular alargado que se extiende distalmente desde […]
 SISTEMA DE RETENCIÓN DE APOYO DE GRAPAS, del 5 de Mayo de 2011, de TYCO HEALTHCARE GROUP LP: Instrumento de grapado quirúrgico que presenta un sistema de retención del material de apoyo que comprende: - un mango ; - un elemento alargado […]
SISTEMA DE RETENCIÓN DE APOYO DE GRAPAS, del 5 de Mayo de 2011, de TYCO HEALTHCARE GROUP LP: Instrumento de grapado quirúrgico que presenta un sistema de retención del material de apoyo que comprende: - un mango ; - un elemento alargado […]
 APARATO GRAPADOR QUIRÚRGICO QUE TIENE UN CONJUNTO APLICADOR DE MATERIAL PARA CIERRE DE HERIDAS, del 27 de Abril de 2011, de TYCO HEALTHCARE GROUP LP: Un aparato grapador quirúrgico para intensificar una o más propiedades de tejido corporal que se repara o se une o que se vaya a reparar o a unir, cuyo […]
APARATO GRAPADOR QUIRÚRGICO QUE TIENE UN CONJUNTO APLICADOR DE MATERIAL PARA CIERRE DE HERIDAS, del 27 de Abril de 2011, de TYCO HEALTHCARE GROUP LP: Un aparato grapador quirúrgico para intensificar una o más propiedades de tejido corporal que se repara o se une o que se vaya a reparar o a unir, cuyo […]